highlight: a11y-dark
1.APP CameraManager初始化
CameraManager初始化代码较少,放在这里进行讲解,CameraManager是一个用来管理相机的系统服务,可以通过此服务获取到相机设备和相机信息,在frameworks/base/core/java/android/app/SystemServiceRegistry.java 注册

应用层可以通过下面方法获取一个CameraManager实例
CameraManager manager = (CameraManager) activity.getSystemService(Context.CAMERA_SERVICE);
代码实现:/frameworks/base/core/java/android/hardware/camera2/
2.Native层CameraServer启动
由于CameraServer需要连接CameraProvider,所以一般来说CameraSever后于CameraProvider启动,CameraServer的启动脚本在cameraserver.rc这个文件,文件位置为frameworks/av/camera/cameraserver/cameraserver.rc
service cameraserver/system/bin/camera
class main
user cameraserver
group audio camera input drmrpc
ioprio rt 4
task_profiles CameraServiceCapacity MaxPerformance
rlimit rtprio 10 10
2.1 main_cameraserver.cpp
此文件为camerserver的入口,创建CameraService实例,并将其添加到ServiceManager中
路径:frameworks/av/camera/cameraserver/main_cameraserver.cpp
#define LOG_TAG "cameraserver"
//#define LOG_NDEBUG 0
#include "CameraService.h"
#include <hidl/HidlTransportSupport.h>
using namespace android;
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
// Set 5 threads for HIDL calls. Now cameraserver will serve HIDL calls in
// addition to consuming them from the Camera HAL as well.
hardware::configureRpcThreadpool(5, /*willjoin*/ false);
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
CameraService::instantiate();
ALOGI("ServiceManager: %p done instantiate", sm.get());
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
//路径http://aospxref.com/android-11.0.0_r21/xref/frameworks/native/include/binder/BinderService.h
template<typename SERVICE>
class BinderService
{
public:
static status_t publish(bool allowIsolated = false,
int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {
sp<IServiceManager> sm(defaultServiceManager());
return sm->addService(String16(SERVICE::getServiceName()), new SERVICE(), allowIsolated,
dumpFlags);
}
static void instantiate() { publish(); }
}
//http://aospxref.com/android-11.0.0_r21/xref/frameworks/av/services/camera/libcameraservice/CameraService.h
class CameraService :
public BinderService<CameraService>,
public virtual ::android::hardware::BnCameraService,
public virtual IBinder::DeathRecipient,
public virtual CameraProviderManager::StatusListener
{
static char const* getServiceName(){ return "media.camera"; }
}
//http://aospxref.com/android-11.0.0_r21/xref/frameworks/native/cmds/servicemanager/ServiceManager.cpp
inline virtual status_t addService(const String16 & name, const sp<IBinder> & service, bool allowIsolated) {
。。。。
};
CameraService::instantiate()用来实例化一个CameraService对象,其中CameraService继承BinderService,BinderService为一个模板类,native service通过sm->addService(String16(SERVICE::getServiceName()), new SERVICE(), allowIsolated,dumpFlags)这种方式来将服务注册到ServiceManager,所以SERVICE为CameraService,向sp sm注册CameraService服务。调用addService函数时会实例化CameraService并将赋值sp强指针引用,从而调用CameraService的onFirstRef成员函数
2.2 CameraService::onFirstRef
在此函数中,主要调用的函数为enumerateProviders(),用来获取CameraProvider的信息
代码位置:frameworks/av/services/camera/libcameraservice/CameraService.cpp
151 void CameraService::onFirstRef()
152 {
153 ALOGI("CameraService process starting");
154
155 BnCameraService::onFirstRef();//调用父类的OnFirstRef()函数
156
157 // Update battery life tracking if service is restarting
158 BatteryNotifier& notifier(BatteryNotifier::getInstance());
159 notifier.noteResetCamera();
160 notifier.noteResetFlashlight();
161
162 status_t res = INVALID_OPERATION;
163
164 res = enumerateProviders();//获取CameraProvider信息
165 if (res == OK) {
166 mInitialized = true;
167 }
168
169 mUidPolicy = new UidPolicy(this);
170 mUidPolicy->registerSelf();
171 mSensorPrivacyPolicy = new SensorPrivacyPolicy(this);
172 mSensorPrivacyPolicy->registerSelf();
173 mAppOps.setCameraAudioRestriction(mAudioRestriction);
174 sp<HidlCameraService> hcs = HidlCameraService::getInstance(this);
175 if (hcs->registerAsService() != android::OK) {
176 ALOGE("%s: Failed to register default android.frameworks.cameraservice.service@1.0",
177 __FUNCTION__);
178 }
179
180 // This needs to be last call in this function, so that it's as close to
181 // ServiceManager::addService() as possible.
182 CameraService::pingCameraServiceProxy();
183 ALOGI("CameraService pinged cameraservice proxy");
184 }
2.3 CameraService::enumerateProviders()
在enumerateProviders()中会实例化一个CameraProviderManager对象,并调用CameraProviderManager的initialize函数,将CameraSevice作为一个成员变量传入到initialize
代码位置:frameworks/av/services/camera/libcameraservice/CameraService.cpp#enumerateProviders
186 status_t CameraService::enumerateProviders() {
187 status_t res;
188
189 std::vector<std::string> deviceIds;
190 {
191 Mutex::Autolock l(mServiceLock);
192
193 if (nullptr == mCameraProviderManager.get()) {
194 mCameraProviderManager = new CameraProviderManager();//实例化CameraProviderManager,并且调用其initialize函数
195 res = mCameraProviderManager->initialize(this);
196 if (res != OK) {
197 ALOGE("%s: Unable to initialize camera provider manager: %s (%d)",
198 __FUNCTION__, strerror(-res), res);
199 return res;
200 }
201 }
202
203
204 // Setup vendor tags before we call get_camera_info the first time
205 // because HAL might need to setup static vendor keys in get_camera_info
206 // TODO: maybe put this into CameraProviderManager::initialize()?
207 mCameraProviderManager->setUpVendorTags();
208
209 if (nullptr == mFlashlight.get()) {
210 mFlashlight = new CameraFlashlight(mCameraProviderManager, this);//创建Flashlight对象
211 }
212
213 res = mFlashlight->findFlashUnits();
214 if (res != OK) {
215 ALOGE("Failed to enumerate flash units: %s (%d)", strerror(-res), res);
216 }
217
218 deviceIds = mCameraProviderManager->getCameraDeviceIds();//获取摄像头ID集合
219 }
220
221
222 for (auto& cameraId : deviceIds) {
223 String8 id8 = String8(cameraId.c_str());
224 if (getCameraState(id8) == nullptr) {
225 onDeviceStatusChanged(id8, CameraDeviceStatus::PRESENT);//更新Camera的状态,暂时不理解
226 }
227 }
228
229 return OK;
230 }
2.4 CameraProviderManager::initialize
代码位置:frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp
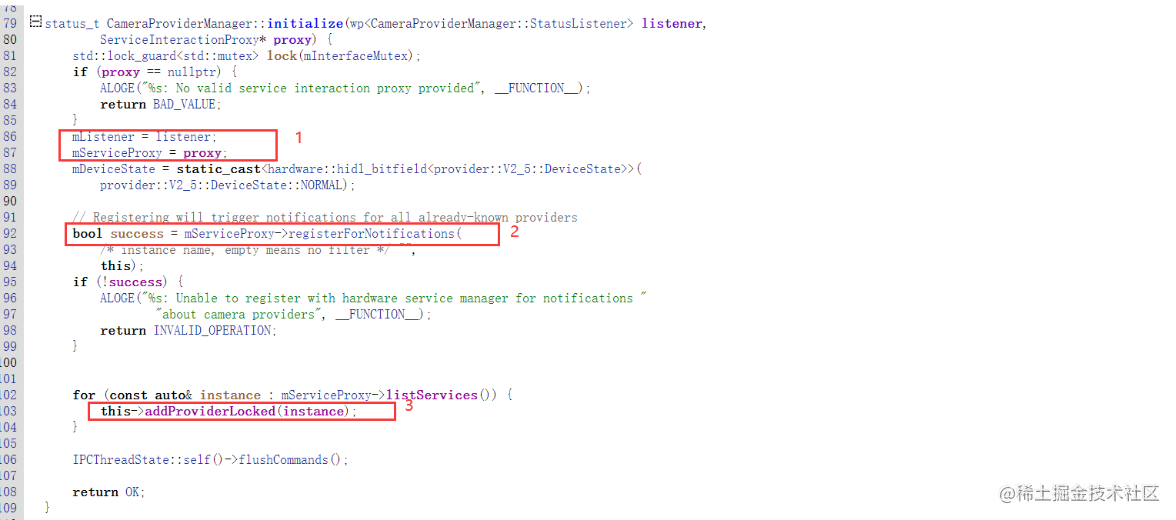
initialize主要做三件事情
- 将传下来的CameraService对象赋给mListener以此来通知CameraSevice状态的变化,mListener的实现类似于java的回调机制,由于CameraService在调用initialize函数
时没有传入第二个参数,所以proxy使用默认参数并且将sHardwareServiceInteractionProxy静态变量赋给mServiceProxy,
代码位置frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.h


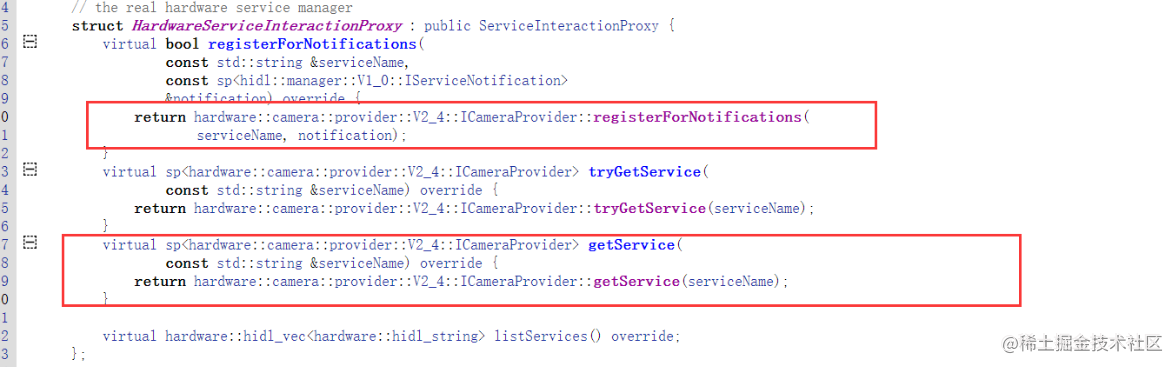
2.调用mServiceProxy->registerForNotifications来调用hardware:📷:provider::V2_4::ICameraProvider的静态方法registerForNotifications
代码位置:frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.h
3.通过this->addProviderLocked来获取当前系统中的CameraProiver对象
代码位置:
frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp#addProviderLocked
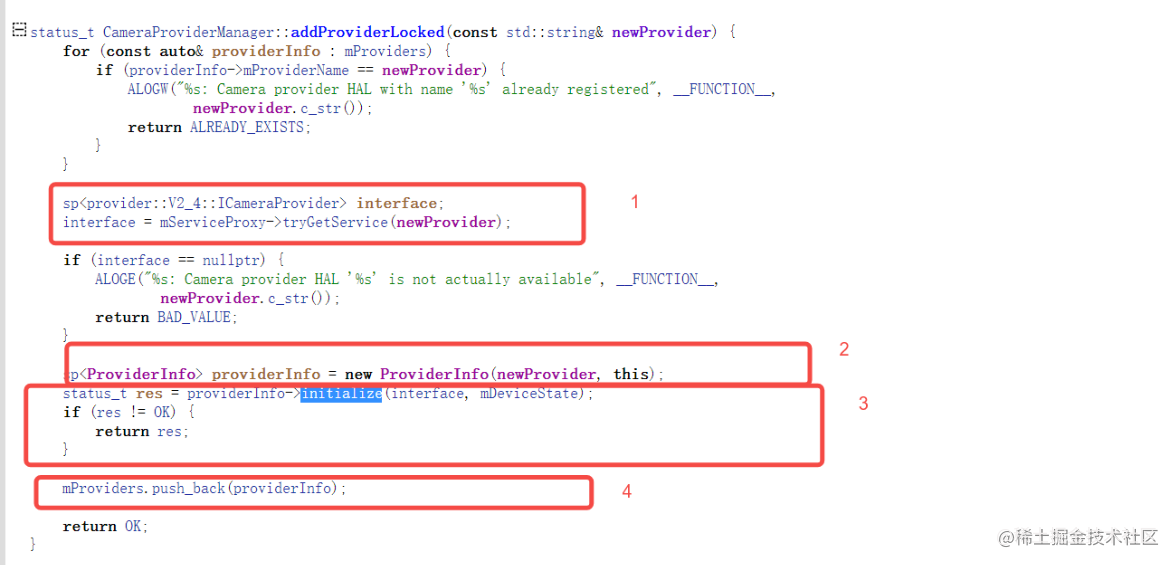
1.调用mServiceProxy->tryGetService(newProvider),会最终调用到一个名为HIDL_FETCH_ICameraProvider 的函数,并且将CameraProvider赋值给
interface
代码位置:hardware/interfaces/camera/provider/2.4/default/CameraProvider_2_4.cpp
template<typename IMPL>
CameraProvider<IMPL>* getProviderImpl() {
CameraProvider<IMPL> *provider = new CameraProvider<IMPL>();
if (provider == nullptr) {
ALOGE("%s: cannot allocate camera provider!", __FUNCTION__);
return nullptr;
}
if (provider->isInitFailed()) {
ALOGE("%s: camera provider init failed!", __FUNCTION__);
delete provider;
return nullptr;
}
return provider;
}
ICameraProvider* HIDL_FETCH_ICameraProvider(const char* name) {
using namespace android::hardware::camera::provider::V2_4::implementation;
ICameraProvider* provider = nullptr;
if (strcmp(name, kLegacyProviderName) == 0) {
provider = getProviderImpl<LegacyCameraProviderImpl_2_4>();
} else if (strcmp(name, kExternalProviderName) == 0) {
provider = getProviderImpl<ExternalCameraProviderImpl_2_4>();
} else {
ALOGE("%s: unknown instance name: %s", __FUNCTION__, name);
}
return provider;
}
const char *kLegacyProviderName = "legacy/0";
const char *kExternalProviderName = "external/0";
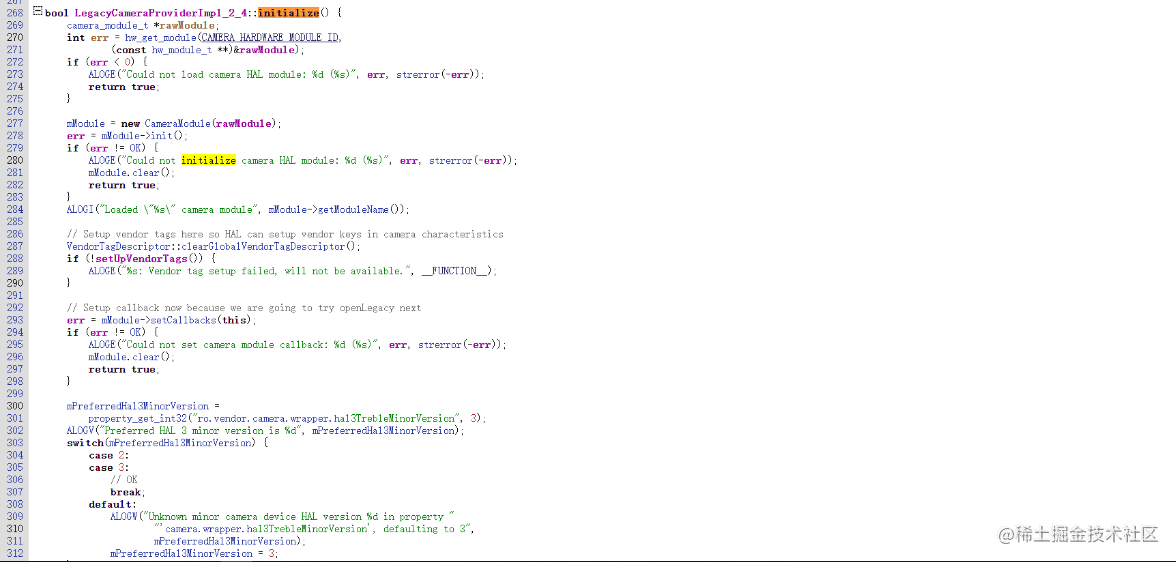
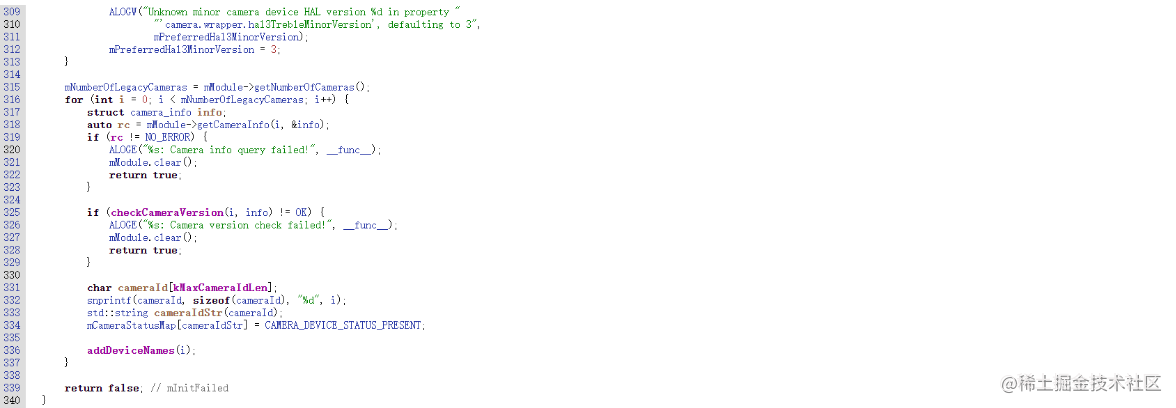
通过比较名字来初始化对应的CameraProvider,从而调用不同CamerProvider的构造函数,以LegacyCameraProviderImpl_2_4为例,在initialize函数中会调用
camera hal module中的函数,例如原生的camera.v4l2.so
代码位置:hardware/interfaces/camera/provider/2.4/default/LegacyCameraProviderImpl_2_4.cpp

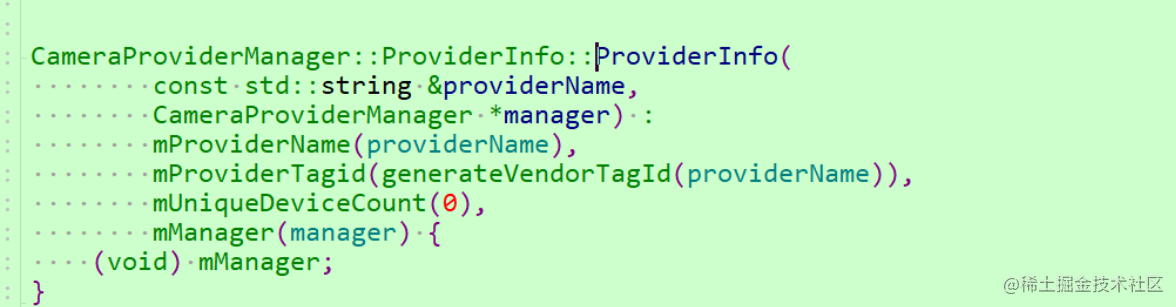
2.实例化一个ProviderInfo对象,并传入对应的CameraProvider对象和CameraProviderManager对象,将报错CameraProvider的名字,这里的名字分别为
“legacy/0” 和 “external/0”,也可自行扩展,并将CameraProviderManager对象赋值给mManager,方便后续查找
3.调用已经实例化的ProviderInfo对象的initialize,在initialize函数中主要调用interface即对应CameraProiver对象的来和Hal层进行通信
setCallback(this)
linkToDeath
getCameraIdList
isSetTorchModeSupported
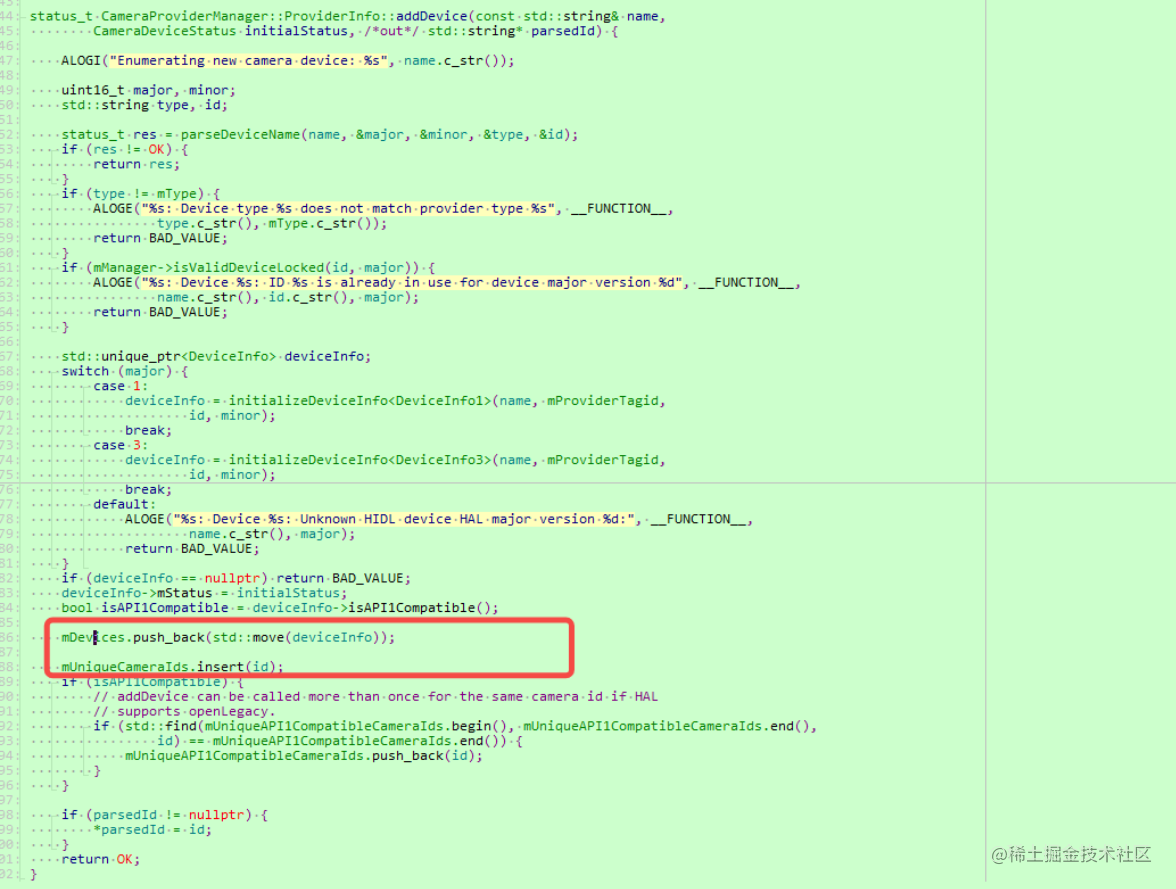
填充从Camera Provider中获取到的Camera名字到device向量中和填充Camera id到mProviderPublicCameraIds向量中
代码位置:
frameworks/av/services/camera/libcameraservice/common/CameraProviderManager.cpp
status_t CameraProviderManager::ProviderInfo::initialize(
sp<provider::V2_4::ICameraProvider>& interface,
hardware::hidl_bitfield<provider::V2_5::DeviceState> currentDeviceState) {
status_t res = parseProviderName(mProviderName, &mType, &mId);
if (res != OK) {
ALOGE("%s: Invalid provider name, ignoring", __FUNCTION__);
return BAD_VALUE;
}
ALOGI("Connecting to new camera provider: %s, isRemote? %d",
mProviderName.c_str(), interface->isRemote());
// Determine minor version
mMinorVersion = 4;
auto cast2_6 = provider::V2_6::ICameraProvider::castFrom(interface);
sp<provider::V2_6::ICameraProvider> interface2_6 = nullptr;
if (cast2_6.isOk()) {
interface2_6 = cast2_6;
if (interface2_6 != nullptr) {
mMinorVersion = 6;
}
}
// We need to check again since cast2_6.isOk() succeeds even if the provider
// version isn't actually 2.6.
if (interface2_6 == nullptr){
auto cast2_5 =
provider::V2_5::ICameraProvider::castFrom(interface);
sp<provider::V2_5::ICameraProvider> interface2_5 = nullptr;
if (cast2_5.isOk()) {
interface2_5 = cast2_5;
if (interface != nullptr) {
mMinorVersion = 5;
}
}
}
// cameraDeviceStatusChange callbacks may be called (and causing new devices added)
// before setCallback returns
hardware::Return<Status> status = interface->setCallback(this);
if (!status.isOk()) {
ALOGE("%s: Transaction error setting up callbacks with camera provider '%s': %s",
__FUNCTION__, mProviderName.c_str(), status.description().c_str());
return DEAD_OBJECT;
}
if (status != Status::OK) {
ALOGE("%s: Unable to register callbacks with camera provider '%s'",
__FUNCTION__, mProviderName.c_str());
return mapToStatusT(status);
}
hardware::Return<bool> linked = interface->linkToDeath(this, /*cookie*/ mId);
if (!linked.isOk()) {
ALOGE("%s: Transaction error in linking to camera provider '%s' death: %s",
__FUNCTION__, mProviderName.c_str(), linked.description().c_str());
return DEAD_OBJECT;
} else if (!linked) {
ALOGW("%s: Unable to link to provider '%s' death notifications",
__FUNCTION__, mProviderName.c_str());
}
if (!kEnableLazyHal) {
// Save HAL reference indefinitely
mSavedInterface = interface;//保存CameraProvider对象
} else {
mActiveInterface = interface;
}
ALOGV("%s: Setting device state for %s: 0x%" PRIx64,
__FUNCTION__, mProviderName.c_str(), mDeviceState);
notifyDeviceStateChange(currentDeviceState);
res = setUpVendorTags();
if (res != OK) {
ALOGE("%s: Unable to set up vendor tags from provider '%s'",
__FUNCTION__, mProviderName.c_str());
return res;
}
// Get initial list of camera devices, if any
std::vector<std::string> devices;
hardware::Return<void> ret = interface->getCameraIdList([&status, this, &devices](
Status idStatus,
const hardware::hidl_vec<hardware::hidl_string>& cameraDeviceNames) {
status = idStatus;
if (status == Status::OK) {
for (auto& name : cameraDeviceNames) {
uint16_t major, minor;
std::string type, id;
status_t res = parseDeviceName(name, &major, &minor, &type, &id);
if (res != OK) {
ALOGE("%s: Error parsing deviceName: %s: %d", __FUNCTION__, name.c_str(), res);
status = Status::INTERNAL_ERROR;
} else {
devices.push_back(name);//填充从Camera Provider中获取到的Camera名字到device向量中
mProviderPublicCameraIds.push_back(id);//填充Camera id到mProviderPublicCameraIds向量中
}
}
} });
if (!ret.isOk()) {
ALOGE("%s: Transaction error in getting camera ID list from provider '%s': %s",
__FUNCTION__, mProviderName.c_str(), linked.description().c_str());
return DEAD_OBJECT;
}
if (status != Status::OK) {
ALOGE("%s: Unable to query for camera devices from provider '%s'",
__FUNCTION__, mProviderName.c_str());
return mapToStatusT(status);
}
// Get list of concurrent streaming camera device combinations
if (mMinorVersion >= 6) {
res = getConcurrentCameraIdsInternalLocked(interface2_6);
if (res != OK) {
return res;
}
}
ret = interface->isSetTorchModeSupported(
[this](auto status, bool supported) {
if (status == Status::OK) {
mSetTorchModeSupported = supported;
}
});
if (!ret.isOk()) {
ALOGE("%s: Transaction error checking torch mode support '%s': %s",
__FUNCTION__, mProviderName.c_str(), ret.description().c_str());
return DEAD_OBJECT;
}
mIsRemote = interface->isRemote();
sp<StatusListener> listener = mManager->getStatusListener();//CameraSevice
for (auto& device : devices) {
std::string id;
status_t res = addDevice(device, common::V1_0::CameraDeviceStatus::PRESENT, &id);
if (res != OK) {
ALOGE("%s: Unable to enumerate camera device '%s': %s (%d)",
__FUNCTION__, device.c_str(), strerror(-res), res);
continue;
}
}
ALOGI("Camera provider %s ready with %zu camera devices",
mProviderName.c_str(), mDevices.size());
// Process cached status callbacks
std::unique_ptr<std::vector<CameraStatusInfoT>> cachedStatus =
std::make_unique<std::vector<CameraStatusInfoT>>();
{
std::lock_guard<std::mutex> lock(mInitLock);
for (auto& statusInfo : mCachedStatus) {
std::string id, physicalId;
status_t res = OK;
if (statusInfo.isPhysicalCameraStatus) {
res = physicalCameraDeviceStatusChangeLocked(&id, &physicalId,
statusInfo.cameraId, statusInfo.physicalCameraId, statusInfo.status);
} else {
res = cameraDeviceStatusChangeLocked(&id, statusInfo.cameraId, statusInfo.status);
}
if (res == OK) {
cachedStatus->emplace_back(statusInfo.isPhysicalCameraStatus,
id.c_str(), physicalId.c_str(), statusInfo.status);
}
}
mCachedStatus.clear();
mInitialized = true;
}
// The cached status change callbacks cannot be fired directly from this
// function, due to same-thread deadlock trying to acquire mInterfaceMutex
// twice.
if (listener != nullptr) {
mInitialStatusCallbackFuture = std::async(std::launch::async,
&CameraProviderManager::ProviderInfo::notifyInitialStatusChange, this,
listener, std::move(cachedStatus));
}
return OK;
}
并将每一个Camera的信息保存到ProviderInfo对象的mDevices中,并将Camera id插入到mUniqueCameraIds列表中

4.addProviderLocked将ProviderInfo信息push到CameraManagerProvider对象中