目录
LD3320介绍:
功能引脚
主要特色功能
通信协议
端口信息
开发流程
stm32c8t6代码
LD3320驱动代码:
LD3320介绍:
- 内置单声道mono 16-bit A/D 模数转换
- 内置双声道stereo 16-bit D/A 数模转换
- 内置 20mW 双声道耳机放大器输出
- 内置 550mW 单声道扬声器放大器输出
- 支持并行接口或者 SPI 接口
- 内置锁相电路 PLL,输入主控时钟频率为 2MHz - 34MHz
- 工作电压:(VDD: for internal core) 3.3V
- 48pin 的 QFN 7*7 标准封装
- 省电模式耗电:1uA
功能引脚
| 功能引脚 | 描述 |
| 3.3V | 3.3V电源正 |
| GND | 电源地 |
| MISO | SPI数据输出 |
| MOSI | SPI数据输入 |
| SCK | SPI时钟输入 |
| NSS | 片选,低电平有效 |
| NC | 悬空 |
| RST | 复位 |
| WR | 写允许,低电平有效 |
| IRQ | 中断输出,输出下降沿 |
主要特色功能
LD3320 是一颗基于非特定人语音识别(SI-ASR:Speaker-Independent Automatic Speech Recognition)技术的语音识别/声控芯片。提供了真正的单芯片语音识别解决方案。LD3320 芯片上集成了高精度的 A/D 和 D/A 接口,不再需要外接辅助的 Flash 和 RAM,即可以实现语音识别/声控/人机对话功能。并且,识别的关键词语列表是可以动态编辑的。基于 LD3320,可以在任何的电子产品中,甚至包括最简单的 51 作为主控芯片的系统中,轻松实现语音识别/声控/人机对话功能。为所有的电子产品增加 VUI(Voice User Interface)语音用户操作界面。
- 高准确度和实用的语音识别效果。
- 非特定人语音识别技术:不需要用户进行录音训练。
- 真正单芯片解决方案:不需要任何外接的辅助 Flash 和 RAM,真正降低系统成本。
- 内置高精度 A/D和D/A通道:不需要外接 AD 芯片,只需要把麦克风接在芯片的AD 引脚上;可以播放声音文件,并提供 550mW 的内置放大器。
- 支持用户自由编辑 50 条关键词语条:在同一时刻,最多在 50 条关键词语中进行识别,终端用户可以根据场景需要,随时编辑和更新这 50 条关键词语的内容。
- 可动态编辑的识别关键词语列表:只需要把识别的关键词语以字符串的形式传送进芯片,即可以在下次识别中立即生效。比如,用户在 51 等 MCU 的编程中,简单地通过设置芯片的寄存器,把诸如“你好”这样的识别关键词的内容动态地传入芯片中,芯片就可以识别这样设定的关键词语了。
通信协议
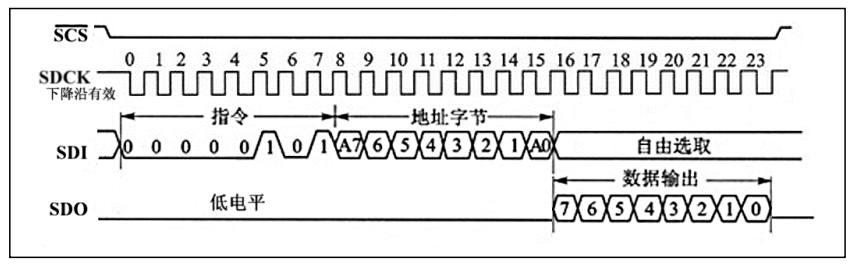
读数据:
写数据:
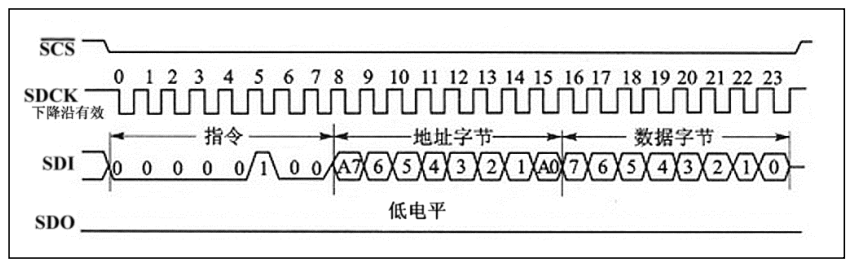
SCS为从机片选, 仅当SCS为低电平时,芯片才会被使能。
SDI主设备数据输出,从设备数据输入(本模块为从设备)。
SDO为主设备数据输入,从设备数据输出(本模块为从设备)。
SDCK为SPI通信时钟。
对于SPI通信而言,数据是有传输时序的,即数据的捕获需要时钟信号的某个边沿触发,而这个边沿就是由时钟极性(CPOL)与时钟相位(CPHA)的组合决定的:
CPOL的高低决定串行同步时钟的空闲状态电平,CPOL = 0,为低电平;CPOL = 1,为高电平。
CPHA的高低决定串行同步时钟是在第一时钟跳变沿还是第二个时钟跳变沿数据被采集,当CPHA = 0,在第一个跳变沿进行数据采集;CPHA = 1,在第二个跳变沿进行数据采集。
从图中可以看出本模块的SPI传输规则:SDCK空闲时是高电平在第一个边沿时开始传输数据,即传输模式为模式二(0x10);8bit数据;按位传输,高位在前(MSB);另外,本模块的SPI速度建议小于1.5MHz

- 非特定人识别
- 无需用户预先录音训练,可直接识别语音指令。
- 动态关键词列表
- 支持动态编辑最多50条关键词(如“开灯”“关灯”),关键词以字符串形式传入芯片即可生效。
- 关键词长度限制:不超过10个汉字或79字节拼音串。
- 硬件集成度高
- 内置高精度A/D和D/A转换器,无需外接Flash、RAM或AD芯片,麦克风直连即可使用。
- 提供550mW内置音频放大器,支持声音播放功能。
- 多种工作模式
- 口令模式:需唤醒词(如“小呆”)触发后续指令,抗环境干扰能力强。
- 普通模式/按键模式:直接识别或通过按键触发识别。
- 硬件连接
- 典型接口:
WR(写使能)、IRQ(中断输出)等控制引脚3。 - 示例:Arduino通过D8引脚控制LED,识别“开灯/关灯”指令10。
- 典型接口:
- 软件配置
-
- 关键词添加:通过寄存器动态写入关键词拼音(如
"kai deng")310。 - 代码库支持:提供STM32/Arduino驱动库及示例代码(如
Voice.addCommand()函数)
- 关键词添加:通过寄存器动态写入关键词拼音(如
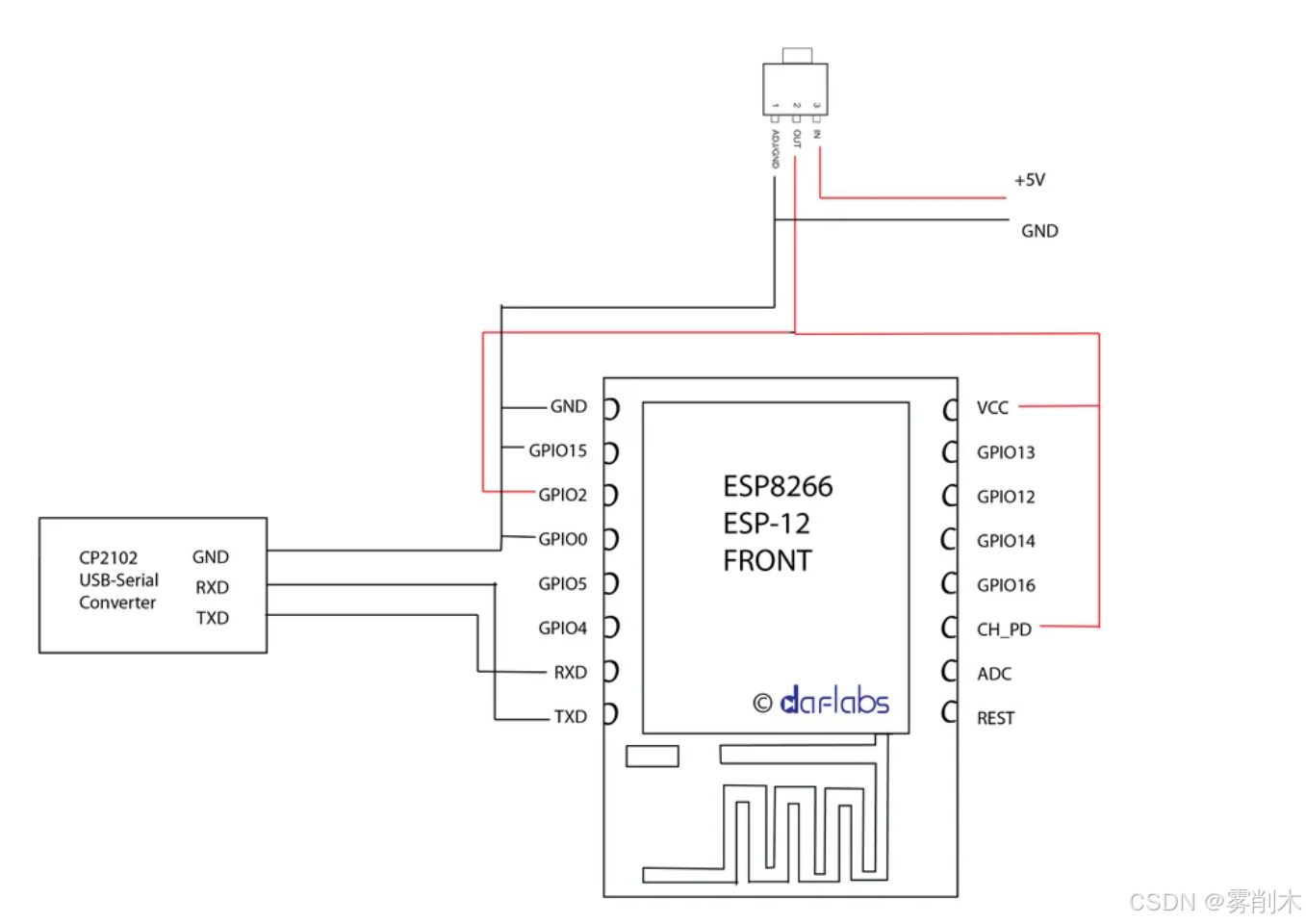
端口信息
/*************端口信息********************
* 接线说明
LD3320接口 STM32接口
* RST PB6
* CS PB8
* WR/SPIS PB9
* P2/SDCK PB13
* P1/SDO PB14
* P0/SDI PB15
* IRQ PA3
* A0 PB7
* RD PA0
*****************************************/
LED PB12
#define LED_KT PBout(12) //客厅灯引脚口
#define LED_WS PBout(0) //卧室灯引脚口
#define JDY_FS PBout(1) //控制继电器风扇引脚口
开发流程
// Arduino示例(控制LED)
#include <ld3320.h>
VoiceRecognition Voice;
#define Led 8
void setup() {
pinMode(Led, OUTPUT);
Voice.init();
Voice.addCommand("kai deng", 0); // 添加指令"开灯",标签0
Voice.addCommand("guan deng", 1); // 添加指令"关灯",标签1
Voice.start();
}
void loop() {
switch(Voice.read()) {
case 0: digitalWrite(Led, HIGH); break; // 开灯
case 1: digitalWrite(Led, LOW); break; // 关灯
}
}
stm32c8t6代码
/*************¶Ë¿ÚÐÅÏ¢********************
* ½ÓÏß˵Ã÷
LD3320½Ó¿Ú STM32½Ó¿Ú
* RST PB6
* CS PB8
* WR/SPIS PB9
* P2/SDCK PB13
* P1/SDO PB14
* P0/SDI PB15
* IRQ PA3
* A0 PB7
* RD PA0
#define LED_KT PBout(12) //¿ÍÌüµÆÒý½Å¿Ú
#define LED_WS PBout(0) //ÎÔÊÒµÆÒý½Å¿Ú
#define JDY_FS PBout(1) //¿ØÖƼ̵çÆ÷·çÉÈÒý½Å¿Ú
*****************************************/
#include "system.h"
#include "SysTick.h"
#include "variable.h"
#include "usart.h"
#include "spi.h"
#include "led.h"
#include "timer.h"
#include "LDchip.h"
#include <stdio.h>
volatile float mm=0;
extern void LD3320_main(void);
int main()
{
Systick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
USART1_Init(115200);
//TIM3_Int_Init(5000-1,72-1);
TIM4_Int_Init(999,72-1);
LED_Init();
//TIM_Cmd(TIM3,ENABLE);
TIM_Cmd(TIM4,ENABLE);
printf("³õʼ»¯Íê³É\r\n");
LD3320_main(); //LD3320 Ö÷º¯Êýº¯Êý
while(1)
{
TimerTreat();
ledshow();
}
}
LD3320驱动代码:
#include "LDchip.h"
#include "Reg_RW.h"
#include "system.h"
#include "SysTick.h"
#include "usart.h"
#include <stdio.h>
#include "led.h"
/*************¶Ë¿ÚÐÅÏ¢********************
* ½ÓÏß˵Ã÷
LD3320½Ó¿Ú STM32½Ó¿Ú
* RST PB6
* CS PB8
* WR/SPIS PB9
* P2/SDCK PB13
* P1/SDO PB14
* P0/SDI PB15
* IRQ PA3
* A0 PB7
* RD PA0
*****************************************/
/************************************************************************************
// nAsrStatus ÓÃÀ´ÔÚmainÖ÷³ÌÐòÖбíʾ³ÌÐòÔËÐеÄ״̬£¬²»ÊÇLD3320оƬÄÚ²¿µÄ״̬¼Ä´æÆ÷
// LD_ASR_NONE: ±íʾûÓÐÔÚ×÷ASRʶ±ð
// LD_ASR_RUNING£º ±íʾLD3320ÕýÔÚ×÷ASRʶ±ðÖÐ
// LD_ASR_FOUNDOK: ±íʾһ´Îʶ±ðÁ÷³Ì½áÊøºó£¬ÓÐÒ»¸öʶ±ð½á¹û
// LD_ASR_FOUNDZERO: ±íʾһ´Îʶ±ðÁ÷³Ì½áÊøºó£¬Ã»ÓÐʶ±ð½á¹û
// LD_ASR_ERROR: ±íʾһ´Îʶ±ðÁ÷³ÌÖÐLD3320оƬÄÚ²¿³öÏÖ²»ÕýÈ·µÄ״̬
*********************************************************************************/
uint8 nAsrStatus=0;
void LD3320_Init(void);
uint8 RunASR(void);
void ProcessInt0(void);
void LD3320_EXTI_Cfg(void);
void LD3320_Spi_cfg(void);
void LD3320_GPIO_Cfg(void);
void LED_gpio_cfg(void);
static void Board_text(uint8 Code_Val);
extern void PrintComBit(USART_TypeDef* USARTx, uint8_t Data);
/***********************************************************
* Ãû ³Æ£º LD3320_main(void)
* ¹¦ ÄÜ£º Ö÷º¯ÊýLD3320³ÌÐòÈë¿Ú
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void LD3320_main(void)
{
uint8 nAsrRes=0;
LD3320_Init();
while(1)
{
switch(nAsrStatus)
{
case LD_ASR_RUNING:
case LD_ASR_ERROR:
break;
case LD_ASR_NONE:
nAsrStatus=LD_ASR_RUNING;
if (RunASR()==0) // Æô¶¯Ò»´ÎASRʶ±ðÁ÷³Ì£ºASR³õʼ»¯£¬ASRÌí¼Ó¹Ø¼ü´ÊÓÆô¶¯ASRÔËËã
{
nAsrStatus = LD_ASR_ERROR;
}
break;
case LD_ASR_FOUNDOK:
nAsrRes = LD_GetResult( ); //ʶ±ð³É¹¦×Ô¶¯ »ñȡʶ±ðÂë,ʶ±ðÂëÔÚLDChip.hÎļþÖУ¬×ÔÐж¨ÒåµÄÊý¾Ý
PrintComBit(USART1,nAsrRes ); //´®¿ÚÊä³öʶ±ðÂë
//Board_text(nAsrRes );//¿ª·¢°å²âÊÔÑÝʾ²¿·Ö---¶Ôʶ±ðÂëµÄ½øÐÐÅжÏ×ö³ö¶¯×÷ (Óû§Òà¿ÉÒÔÌí¼Ó×Ô¼ºµÄ¹¦ÄÜ£¬ÀýÈç¿ØÖÆIO¿ÚÊä³ö£¬´®¿ÚÊý¾ÝÊä³öµÈ)
nAsrStatus = LD_ASR_NONE;
break;
case LD_ASR_FOUNDZERO:
default: nAsrStatus = LD_ASR_NONE;
break;
}//switch
//¿ª·¢°å²âÊÔ
Board_text(nAsrRes );
}// while
}
static void Board_text(uint8 Code_Val)
{
switch(Code_Val) //¶Ô½á¹ûÖ´ÐÐÏà¹Ø²Ù×÷
{
case CODE_DD: //ÃüÁî¡°´ò¿ª¿ÍÌüµÆ¡±
LED_KT=1;
printf("´ò¿ª¿ÍÌüµÆ\r\n");
break;
case CODE_GD: //ÃüÁî¡°¹Ø±Õ¿ÍÌüµÆ¡±
LED_KT=0;
printf("¹Ø±Õ¿ÍÌüµÆ\r\n");
break;
case CODE_QDD: //ÃüÁî¡°´ò¿ªÎÔÊҵơ±
//´ò¿ªÎÔÊÒµÆ
LED_WS = 1;
printf("´ò¿ªÎÔÊÒµÆ\r\n");
break;
case CODE_DG: //ÃüÁî¡°¹Ø±ÕÎÔÊҵơ±
//¹Ø±ÕÎÔÊÒµÆ
LED_WS = 0;
printf("¹Ø±ÕÎÔÊÒµÆ\r\n");
break;
case CODE_LSD: //ÃüÁî¡°È«²¿´ò¿ª¡±
//È«²¿´ò¿ª
LED_KT=1;
LED_WS = 1;
printf("È«²¿´ò¿ª\r\n");
break;
case CODE_SSD: //ÃüÁî¡°È«²¿¹Ø±Õ¡±
//È«²¿¹Ø±Õ
LED_KT=0;
LED_WS = 0;
printf("È«²¿¹Ø±Õ\r\n");
break;
case CODE_DDR: //ÃüÁî¡°´ò¿ª·çÉÈ¡±
//´ò¿ª·çÉÈ
printf("´ò¿ª·çÉÈ\r\n");
JDY_FS = 0;
break;
case CODE_RDD: //ÃüÁî¡°¹Ø±Õ·çÉÈ¡±
//¹Ø±Õ·çÉÈ
JDY_FS = 1;
printf("¹Ø±Õ·çÉÈ\r\n");
break;
default:break;
}
}
/***********************************************************
* Ãû ³Æ£ºLD3320_Init(void)
* ¹¦ ÄÜ£ºÄ£¿éÇý¶¯¶Ë¿Ú³õʼÅäÖÃ
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void LD3320_Init(void)
{
LD3320_GPIO_Cfg();
LD3320_EXTI_Cfg();
LD3320_Spi_cfg();
LD_reset();
}
/***********************************************************
* Ãû ³Æ£º RunASR(void)
* ¹¦ ÄÜ£º ÔËÐÐASR
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
uint8 RunASR(void)
{
uint8 i=0;
uint8 asrflag=0;
for (i=0; i<5; i++) // ·ÀÖ¹ÓÉÓÚÓ²¼þÔÒòµ¼ÖÂLD3320оƬ¹¤×÷²»Õý³££¬ËùÒÔÒ»¹²³¢ÊÔ5´ÎÆô¶¯ASRʶ±ðÁ÷³Ì
{
LD_AsrStart(); //³õʼ»¯ASR
LD3320_delay(100);
if (LD_AsrAddFixed()==0) //Ìí¼Ó¹Ø¼ü´ÊÓïµ½LD3320оƬÖÐ
{
LD_reset(); // LD3320оƬÄÚ²¿³öÏÖ²»Õý³££¬Á¢¼´ÖØÆôLD3320оƬ
LD3320_delay(50); // ²¢´Ó³õʼ»¯¿ªÊ¼ÖØÐÂASRʶ±ðÁ÷³Ì
continue;
}
LD3320_delay(10);
if (LD_AsrRun() == 0)
{
LD_reset(); // LD3320оƬÄÚ²¿³öÏÖ²»Õý³££¬Á¢¼´ÖØÆôLD3320оƬ
LD3320_delay(50); // ²¢´Ó³õʼ»¯¿ªÊ¼ÖØÐÂASRʶ±ðÁ÷³Ì
continue;
}
asrflag=1;
break; // ASRÁ÷³ÌÆô¶¯³É¹¦£¬Í˳öµ±Ç°forÑ»·¡£¿ªÊ¼µÈ´ýLD3320ËͳöµÄÖжÏÐźÅ
}
return asrflag;
}
/***********************************************************
* Ãû ³Æ£º void Delay_( int i)
* ¹¦ ÄÜ£º ¶ÌÑÓʱ
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void Delay_( int i)
{
while( i--)
{
}
}
/***********************************************************
* Ãû ³Æ£º LD3320_delay(unsigned long uldata)
* ¹¦ ÄÜ£º ³¤ÑÓʱº¯Êý
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void LD3320_delay(unsigned long uldata)
{
unsigned int j = 0;
unsigned int g = 0;
for (j=0;j<5;j++)
{
for (g=0;g<uldata;g++)
{
Delay_(120);
}
}
}
/***********************************************************
* Ãû ³Æ£ºLD3320_GPIO_Cfg(void)
* ¹¦ ÄÜ£º³õʼ»¯ÐèÒªÓõ½µÄIO¿Ú
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void LD3320_GPIO_Cfg(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// ÅäÖÃPA8 Êä³ö 8M ²¨ÐÎ
//¶¨ÒåRST/A0/CS/WR¶Ë¿Ú
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB ,ENABLE);
//LD_CS /RSET
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_7); /*A0ĬÈÏÀ¸ß*/
}
}
/***********************************************************
* Ãû ³Æ£ºLD3320_Spi_cfg(void)
* ¹¦ ÄÜ£ºÅäÖÃSPI¹¦ÄܺͶ˿ڳõʼ»¯
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void LD3320_Spi_cfg(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTBʱÖÓʹÄÜ
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPI2ʱÖÓʹÄÜ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15¸´ÓÃÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
LD_CS_H();
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); //PB13/14/15ÉÏÀ
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //ÉèÖÃSPIµ¥Ïò»òÕßË«ÏòµÄÊý¾Ýģʽ:SPIÉèÖÃΪ˫ÏßË«ÏòÈ«Ë«¹¤
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //ÉèÖÃSPI¹¤×÷ģʽ:ÉèÖÃΪÖ÷SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //ÉèÖÃSPIµÄÊý¾Ý´óС:SPI·¢ËͽÓÊÕ8λ֡½á¹¹
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //Ñ¡ÔñÁË´®ÐÐʱÖÓµÄÎÈ̬:ʱÖÓÐü¿Õ¸ß
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //Êý¾Ý²¶»ñÓÚµÚ¶þ¸öʱÖÓÑØ
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSSÐźÅÓÉÓ²¼þ£¨NSS¹Ü½Å£©»¹ÊÇÈí¼þ£¨Ê¹ÓÃSSI룩¹ÜÀí:ÄÚ²¿NSSÐźÅÓÐSSIλ¿ØÖÆ
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64; //¶¨Ò岨ÌØÂÊÔ¤·ÖƵµÄÖµ:²¨ÌØÂÊÔ¤·ÖƵֵΪ16
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //Ö¸¶¨Êý¾Ý´«Êä´ÓMSBλ»¹ÊÇLSBλ¿ªÊ¼:Êý¾Ý´«Êä´ÓMSBλ¿ªÊ¼
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRCÖµ¼ÆËãµÄ¶àÏîʽ
SPI_Init(SPI2, &SPI_InitStructure); //¸ù¾ÝSPI_InitStructÖÐÖ¸¶¨µÄ²ÎÊý³õʼ»¯ÍâÉèSPIx¼Ä´æÆ÷
SPI_Cmd(SPI2, ENABLE); //ʹÄÜSPIÍâÉè
}
/***********************************************************
* Ãû ³Æ£º LD3320_EXTI_Cfg(void)
* ¹¦ ÄÜ£º ÍⲿÖжϹ¦ÄÜÅäÖúÍÏà¹Ø¶Ë¿ÚÅäÖÃ
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void LD3320_EXTI_Cfg(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
//¶¨ÒåIRQÖжÏÒý½ÅÅäÖÃ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//ÍⲿÖжÏÏßÅäÖÃ
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource3);
EXTI_InitStructure.EXTI_Line = EXTI_Line3;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger =EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
EXTI_GenerateSWInterrupt(EXTI_Line3);
GPIO_SetBits(GPIOA,GPIO_Pin_3); //ĬÈÏÀ¸ßÖжÏÒý½Å
EXTI_ClearFlag(EXTI_Line3);
EXTI_ClearITPendingBit(EXTI_Line3);
//ÖжÏǶÌ×ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/***********************************************************
* Ãû ³Æ£º EXTI1_IRQHandler(void)
* ¹¦ ÄÜ£º ÍⲿÖжϺ¯Êý
* Èë¿Ú²ÎÊý£º
* ³ö¿Ú²ÎÊý£º
* ˵ Ã÷£º
* µ÷Ó÷½·¨£º
**********************************************************/
void EXTI3_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line3)!= RESET )
{
ProcessInt0();
EXTI_ClearFlag(EXTI_Line3);
EXTI_ClearITPendingBit(EXTI_Line3);
}
}





![[RDK X5] MJPG编解码开发实战:从官方API到OpenWanderary库的C++/Python实现](https://i-blog.csdnimg.cn/direct/2333a33746b14bd2beadfd9543a48b0a.png)