算法原理:
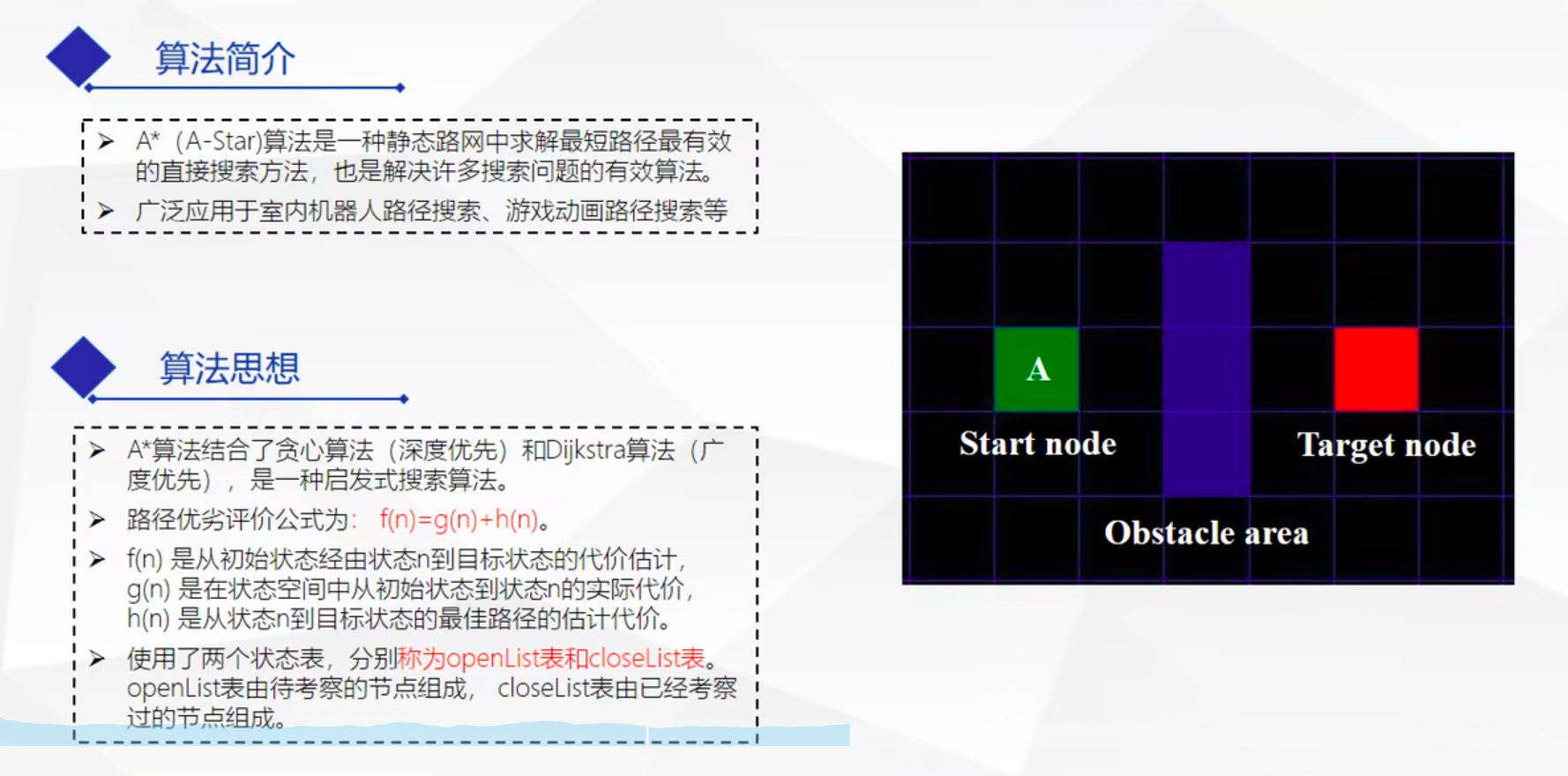
A*算法是一种启发式搜索算法,用于在图中寻找最短路径。它结合了Dijkstra算法的确保最短路径的优点和贪心最佳优先搜索的高效性。其核心在于使用一个评估函数:
f(n) = g(n) + h(n)
其中:
- g(n) 表示从起点到节点n的实际代价。
- h(n) 表示从节点n到目标节点的估计代价(启发式函数)。
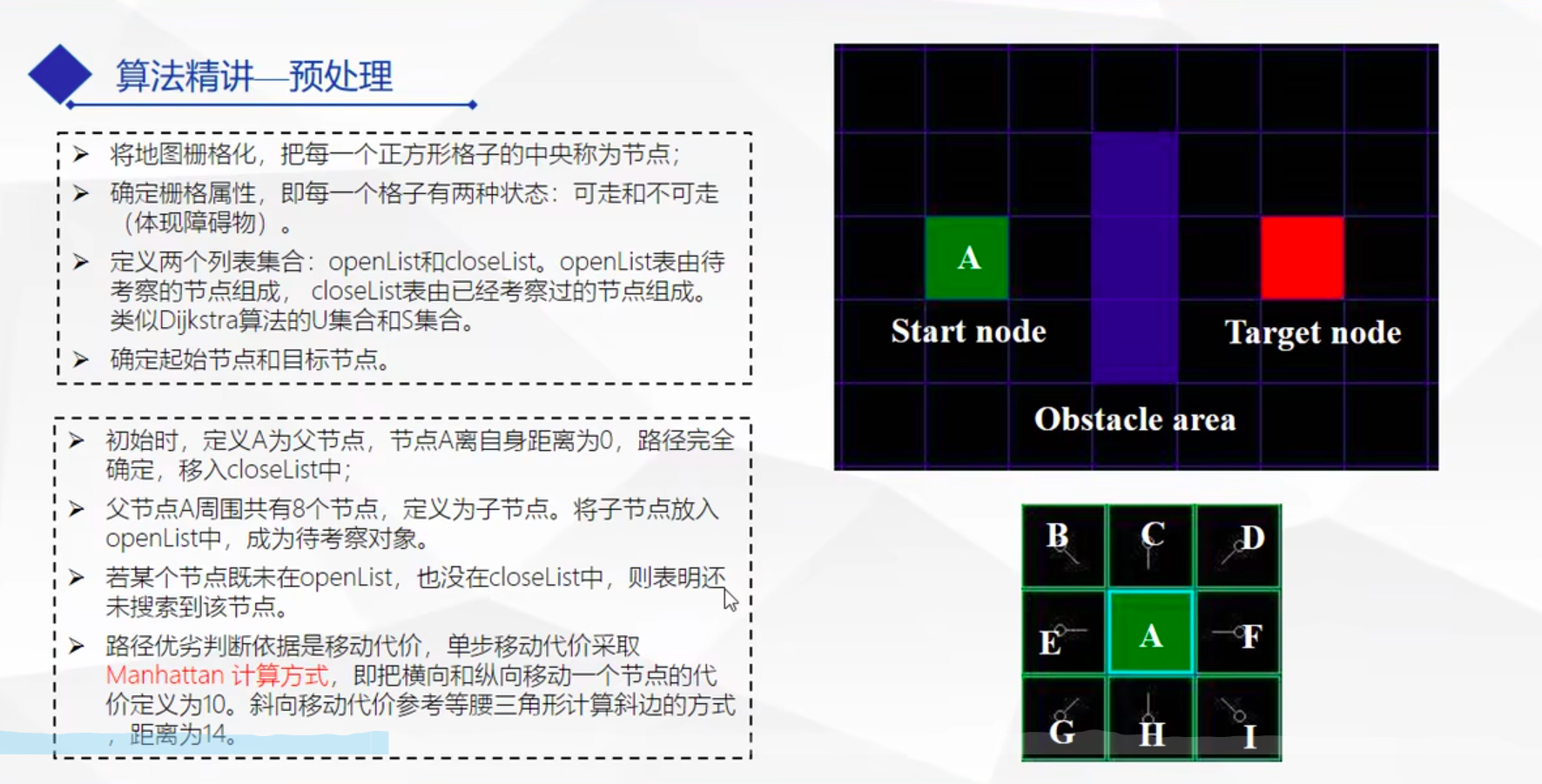
1. 启发式函数h(n):必须满足可采纳性(即永远不会高估实际代价)以保证找到最短路径。常见的启发式函数有曼哈顿距离(适用于网格中只能上下左右移动)和欧几里得距离。
2. 开放列表(Open List):存储待考察的节点,通常用优先队列(小顶堆)实现,按f值排序。
3. 封闭列表(Closed List):存储已考察过的节点,避免重复处理。
4. 节点数据结构:通常包含:
- 位置信息(坐标)
- g值(从起点到该节点的实际代价)
- h值(启发式估计值)
- f值(f = g + h)
- 父节点指针(用于回溯路径)
A* 算法设计原理
A* 算法是一种启发式搜索算法,用于在图中寻找从起点到目标点的最优路径。它结合了 Dijkstra 算法的完备性(保证找到最短路径)和贪心最佳优先搜索的高效性。
核心公式:
f(n) = g(n) + h(n)
g(n):从起点到节点n的实际代价
h(n):从节点n到目标的估计代价(启发式函数)
f(n):节点n的综合优先级关键要求:
可采纳性:
h(n)必须 ≤ 实际最小代价(不能高估)一致性:
h(n) ≤ c(n, n') + h(n')(三角不等式)数据结构:
开放列表 (Open List):优先队列,存储待探索节点(按
f(n)排序)封闭列表 (Closed List):记录已探索节点
节点信息:坐标、
g值、h值、父节点指针
算法步骤:
- 初始化:将起点加入开放列表。
- 循环直到找到目标或开放列表为空:
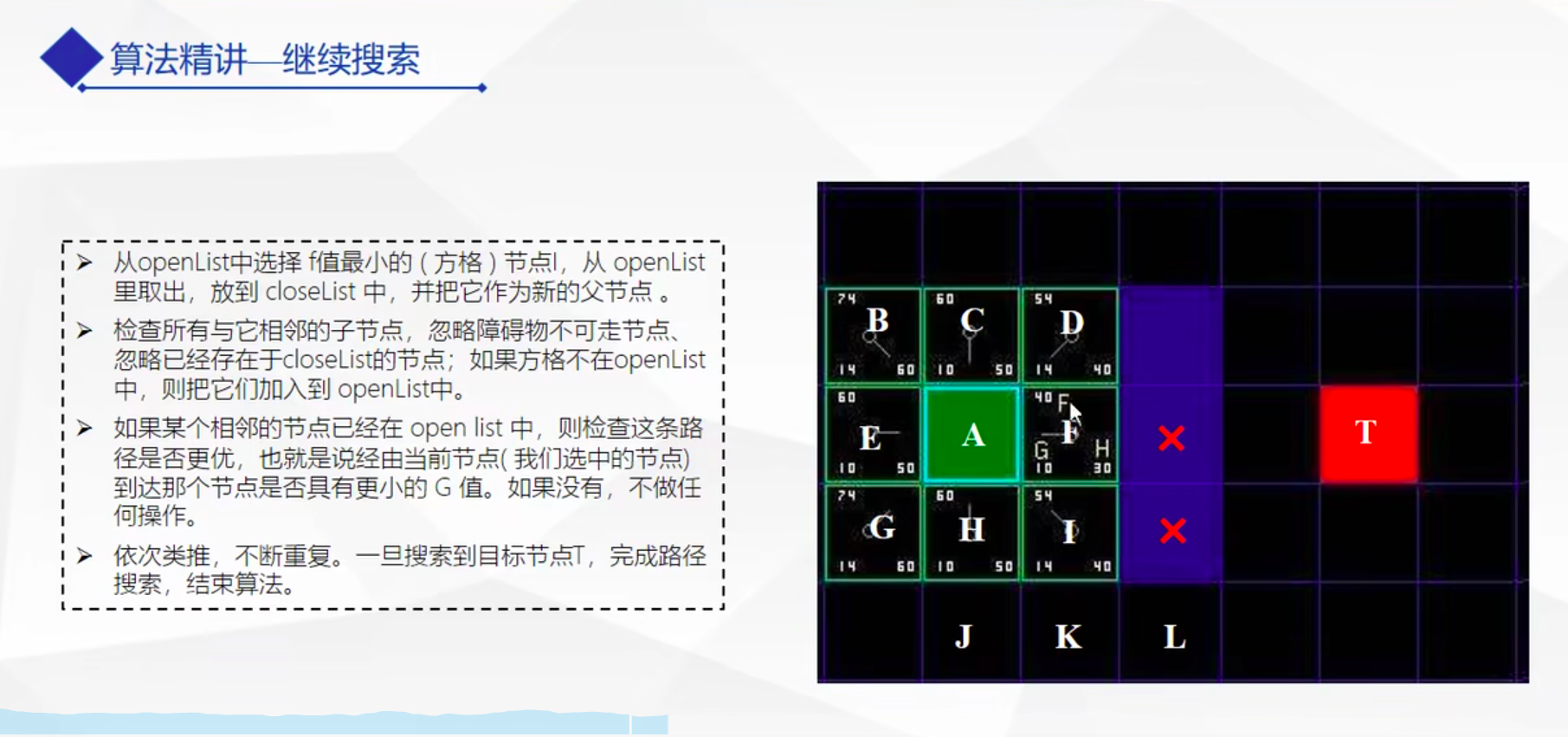
1. 从开放列表中取出f值最小的节点(作为当前节点)。
2. 如果该节点是目标节点,则回溯构建路径并返回。
3. 将该节点移入封闭列表。
4. 遍历当前节点的所有邻居:
- 如果邻居在封闭列表中,则跳过。
- 如果邻居不在开放列表中,则计算其g、h、f值,设置父节点为当前节点,并加入开放列表。
- 如果邻居已在开放列表中,则检查通过当前节点到达该邻居是否具有更小的g值(即更优路径),如果是,则更新其g值和f值,并重新调整优先队列。

该部分可参见---> A*
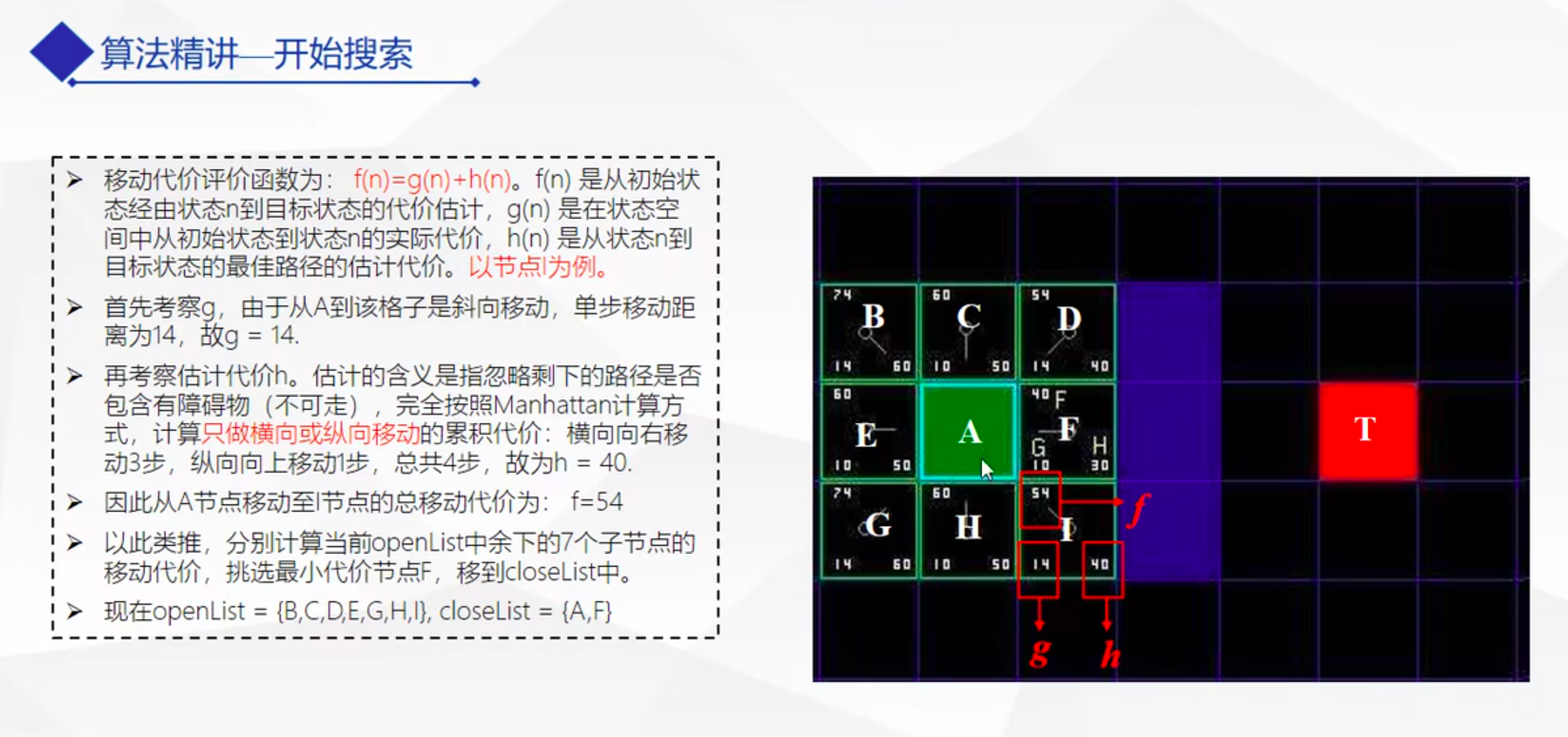
此时,I节点总代价最小,会以I节点继续作为父节点,继续搜索邻近节点。
C++实现A*算法具体流程:
具体实现步骤(C++)
我们将实现一个在二维网格上运行的A*算法。网格中0表示可通行,1表示障碍物。
数据结构
1. 节点(Node):包含坐标(x,y),g值,h值,f值,父节点坐标。
2. 比较函数:用于优先队列,按f值从小到大排列(若f值相同,可以按h值排序)。
步骤
1. 创建两个列表:开放列表(优先队列)和封闭列表(可以用二维数组或哈希集合)。
2. 初始化起点的g=0,h=启发式函数计算,f=g+h,并将起点加入开放列表。
3. 循环直到开放列表为空:
- 取出f值最小的节点作为当前节点。
- 若当前节点为目标节点,回溯路径并返回。
- 将当前节点标记为已访问(加入封闭列表)。
- 遍历当前节点的八个邻居(或四个,这里我们实现八个方向的移动):
- 跳过障碍物和不可达位置。
- 如果邻居不在封闭列表中:
- 计算临时g值(当前节点的g + 移动到邻居的代价,直线为1,斜线为√2,但为了简单,我们假设直线代价10,斜线代价14,这样避免浮点运算)。
- 如果该邻居不在开放列表中,则加入。
- 如果在开放列表中,但新的g值更小,则更新其g值和f值,并调整优先队列(由于标准优先队列不支持更新,我们采用懒惰删除:即当节点被取出时检查是否已被访问,同时允许重复加入节点,但通过封闭列表避免重复处理。或者使用可更新的优先队列,但C++标准库不直接支持,所以我们采用允许重复加入但用封闭列表过滤,并在取出时判断是否已经在封闭列表中。另外,我们也可以在节点进入开放列表时记录状态,当有更优路径时,我们直接更新节点的值,然后重新调整优先队列。然而,由于标准优先队列不支持更新,我们可以使用multiset或者set来手动实现更新,或者使用一个二维数组来记录每个节点的最佳g值,这样当遇到重复节点时,如果新的g值更小,我们就重新加入一个节点(即同一个位置有两个节点,但g值不同),然后旧的节点在取出时会被封闭列表过滤掉。这里我们采用后一种方法:用一个二维数组`gScore`记录每个节点的最佳g值,这样在遇到同一个节点时,如果新的g值更小,我们就重新生成一个节点加入开放列表,而旧节点即使还在队列中,当它被取出时,我们会检查它的g值是否与当前记录的最佳g值一致,如果不一致则跳过(或者用封闭列表,但封闭列表是在节点被处理后才加入,所以我们可以不检查,因为新节点g值更小,会先被处理)。然而,更简单的方法是:每当计算邻居时,如果新的g值小于该邻居之前记录的g值,那么我们就更新这个邻居的g值,并重新加入开放列表(尽管它已经在队列中,但我们允许重复,因为新的f值更小,所以会先被取出)。然后当从开放列表中取出节点时,我们检查它是否已经被处理过(即封闭列表),如果已经处理过则跳过。
优化点
- 使用一个二维数组gScore来存储每个位置的最佳g值,初始为无穷大。
- 当计算临时g值(tentative_g)小于该邻居的gScore时,更新gScore,并将该节点(新的g值)加入开放列表。
#include <iostream> #include <vector> #include <queue> #include <cmath> #include <algorithm> #include <set> using namespace std; // 定义节点结构 struct Node { int x, y; // 节点坐标 double g, h, f; // 代价值 Node* parent; // 父节点指针 Node(int x, int y, Node* parent = nullptr) : x(x), y(y), g(0), h(0), f(0), parent(parent) {} // 重载比较运算符(用于优先队列) bool operator<(const Node& other) const { return f > other.f; // 注意:优先队列默认最大堆,反向定义实现最小堆 } }; // 比较函数对象(用于优先队列) struct NodeCompare { bool operator()(const Node* a, const Node* b) const { return a->f > b->f; // f值小的优先级高 } }; // 移动方向定义(8个方向) const int dx[8] = {1, 0, -1, 0, 1, 1, -1, -1}; const int dy[8] = {0, 1, 0, -1, 1, -1, 1, -1}; const double costStraight = 1.0; // 直线移动代价 const double costDiagonal = 1.414;// 对角线移动代价(√2) // 启发式函数(欧几里得距离) double heuristic(int x1, int y1, int x2, int y2) { return sqrt(pow(x1 - x2, 2) + pow(y1 - y2, 2)); } // A* 算法核心实现 vector<pair<int, int>> aStarSearch(vector<vector<int>>& grid, pair<int, int> start, pair<int, int> goal) { int rows = grid.size(); int cols = grid[0].size(); // 开放列表(优先队列) priority_queue<Node*, vector<Node*>, NodeCompare> openList; // 封闭列表(二维数组标记) vector<vector<bool>> closedList(rows, vector<bool>(cols, false)); // 起点节点初始化 Node* startNode = new Node(start.first, start.second); startNode->h = heuristic(start.first, start.second, goal.first, goal.second); startNode->f = startNode->g + startNode->h; openList.push(startNode); while (!openList.empty()) { // 获取f值最小的节点 Node* current = openList.top(); openList.pop(); int x = current->x; int y = current->y; // 到达目标点:回溯生成路径 if (x == goal.first && y == goal.second) { vector<pair<int, int>> path; while (current) { path.push_back({current->x, current->y}); current = current->parent; } reverse(path.begin(), path.end()); return path; } // 当前节点加入封闭列表 closedList[x][y] = true; // 遍历所有邻居方向 for (int i = 0; i < 8; ++i) { int nx = x + dx[i]; int ny = y + dy[i]; // 检查邻居是否合法 if (nx < 0 || nx >= rows || ny < 0 || ny >= cols || grid[nx][ny] == 1 || closedList[nx][ny]) { continue; } // 计算移动代价(判断直线/对角线) double moveCost = (abs(dx[i]) + abs(dy[i]) == 2) ? costDiagonal : costStraight; double newG = current->g + moveCost; // 创建邻居节点 Node* neighbor = new Node(nx, ny, current); neighbor->g = newG; neighbor->h = heuristic(nx, ny, goal.first, goal.second); neighbor->f = neighbor->g + neighbor->h; // 加入开放列表 openList.push(neighbor); } } return {}; // 未找到路径 } // 打印网格和路径 void printSolution(const vector<vector<int>>& grid, const vector<pair<int, int>>& path) { vector<vector<char>> display = vector<vector<char>>( grid.size(), vector<char>(grid[0].size(), ' ')); // 标记障碍物 for (int i = 0; i < grid.size(); ++i) { for (int j = 0; j < grid[0].size(); ++j) { if (grid[i][j] == 1) display[i][j] = '#'; } } // 标记路径(起点和终点特殊标记) for (const auto& p : path) { if (p == path.front()) display[p.first][p.second] = 'S'; else if (p == path.back()) display[p.first][p.second] = 'G'; else display[p.first][p.second] = '*'; } // 打印结果 for (const auto& row : display) { for (char c : row) { cout << '[' << c << ']'; } cout << endl; } } int main() { // 示例网格:0=空地, 1=障碍物 vector<vector<int>> grid = { {0, 0, 0, 0, 0, 0}, {0, 1, 1, 0, 1, 0}, {0, 0, 0, 0, 1, 0}, {0, 1, 1, 1, 1, 0}, {0, 0, 0, 0, 0, 0} }; pair<int, int> start = {0, 0}; pair<int, int> goal = {4, 5}; // 执行A*搜索 vector<pair<int, int>> path = aStarSearch(grid, start, goal); // 输出结果 if (path.empty()) { cout << "No path found!" << endl; } else { cout << "Path found (" << path.size() << " steps):" << endl; for (const auto& p : path) { cout << "-> (" << p.first << "," << p.second << ") "; } cout << "\n\nVisualization:\n"; printSolution(grid, path); } return 0; }执行结果示例:
此实现完整展示了A*算法的核心机制,包含启发式函数设计、开放/封闭列表管理、路径回溯等关键环节,适合用于网格地图中的路径规划问题。
关键实现说明:
节点表示:
存储坐标、
g/h/f值、父节点指针重载
<运算符实现优先队列排序启发式函数:
使用欧几里得距离(满足可采纳性)
替代方案:曼哈顿距离(仅限4方向)
邻居探索:
支持8方向移动(含对角线)
直线代价1.0,对角线代价1.414(√2)
边界检查和障碍物检查
路径回溯:
通过父节点指针反向追溯路径
使用
reverse()获得正向路径内存管理:
简化版未处理内存释放(实际应用需优化)
建议使用智能指针或对象池
注意事项和改进:
注意事项
1. 内存管理:上述代码存在内存泄漏,因为创建的节点在加入开放列表后,如果没有被及时删除,会导致内存泄漏。在实际应用中,应该使用智能指针(如`unique_ptr`)或者用一个容器管理所有节点,在函数返回前统一释放。
2. 启发式函数:这里实现了对角线距离的启发式函数,确保可采纳性。
3. 移动代价:直线移动代价为10,斜线为14(即10的倍数,避免浮点数)。
4. 节点更新:由于标准优先队列不支持更新节点值,我们采用每次有更优路径时重新加入节点(允许重复),并在取出节点时检查是否已被访问(封闭列表)来跳过旧节点。
5. 封闭列表:用于记录已处理的节点,避免重复处理。
6. 性能:在网格较大时,优先队列的操作(O(logN))和节点数量(最多网格大小)会影响性能。
改进方向
- 内存管理:使用智能指针或节点池。
- 数据结构:使用更高效的优先队列(如Fibonacci堆)来支持节点值的更新,但C++标准库中没有提供。
- 启发式函数:可以根据实际需求调整,但必须确保可采纳性(如使用欧几里得距离)。
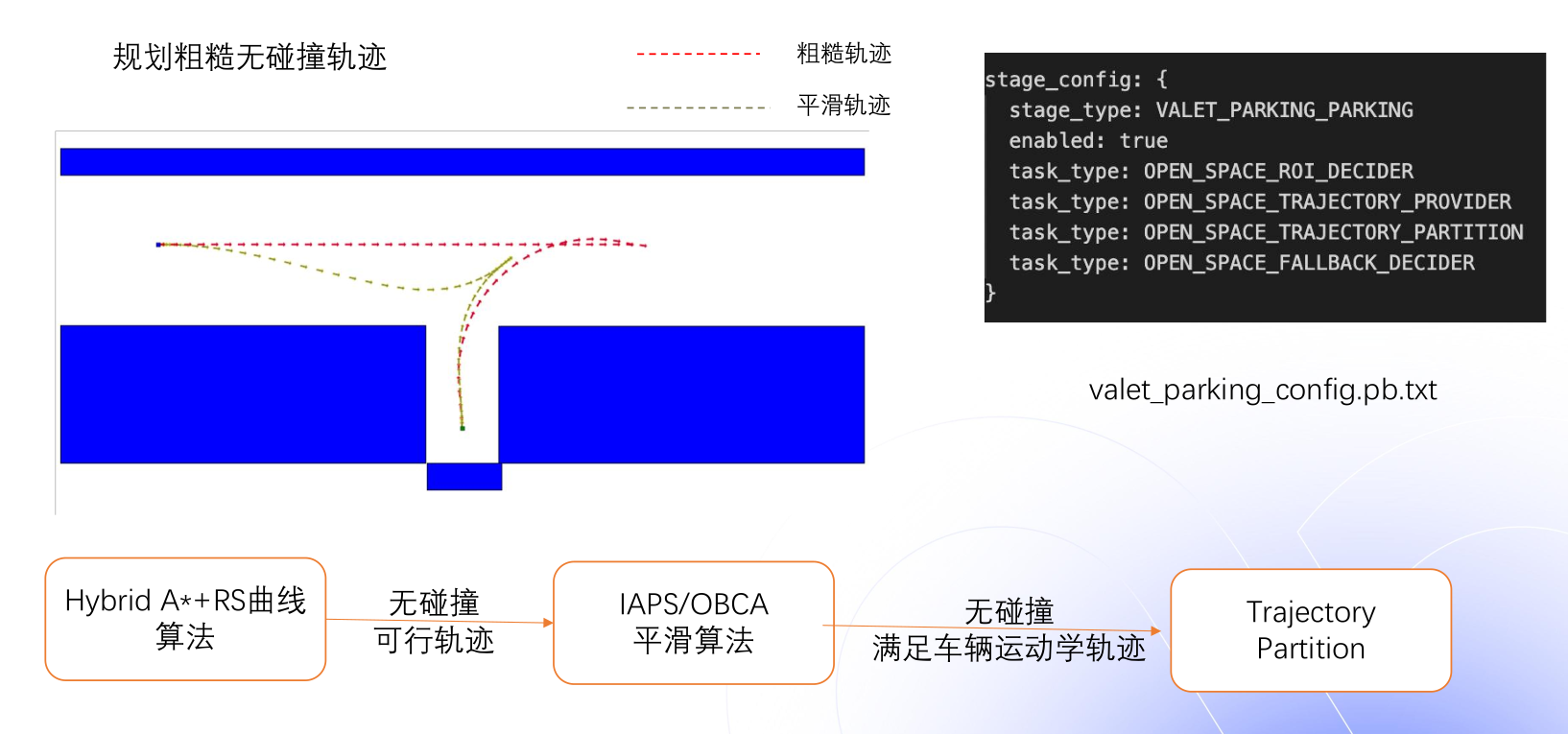
- 路径平滑:A*找到的路径可能不是最平滑的,可以后处理进行平滑。
终极目标: