1. 概述
2025年2月14日,清华大学AIR智能产业研究院联合毫末智行、中科院自动化所和香港中文大学团队,在ICLR 2025会议上发布了Diffusion Planner——一种创新性的基于Diffusion Transformer的自动驾驶规划模型架构。该系统联合建模周车运动预测与自车行为规划,显著提升了复杂场景下的决策效率与稳定性,克服了传统学习方法对后处理的依赖,推动了自动驾驶系统从“黑盒生成”走向“可控可调”的新时代。
- 项目地址:https://zhengyinan-air.github.io/Diffusion-Planner/
2. 核心技术
该算法创新性地设计了基于 Diffusion Transformer 的自动驾驶规划模型架构,高效处理复杂场景输入,并联合建模周车运动预测与自车规划中的多模态驾驶行为,充分发挥扩散模型在闭环规划中的潜力,解决了现有基于学习的规划方法对后处理的严重依赖问题。此外,借助扩散模型的引导机制,模型在部署阶段能够灵活适应不同的驾驶需求,提高泛化能力与实用性。
2.1 轨迹生成为核心建模任务
- 将自车规划与周车运动预测统一为 未来轨迹生成任务;
- 以协同建模的方式模拟多车交互行为,捕捉动态交通环境中的 自然协同行为模式;
- 避免传统多阶段预测+规划框架中的信息割裂和误差累积问题。
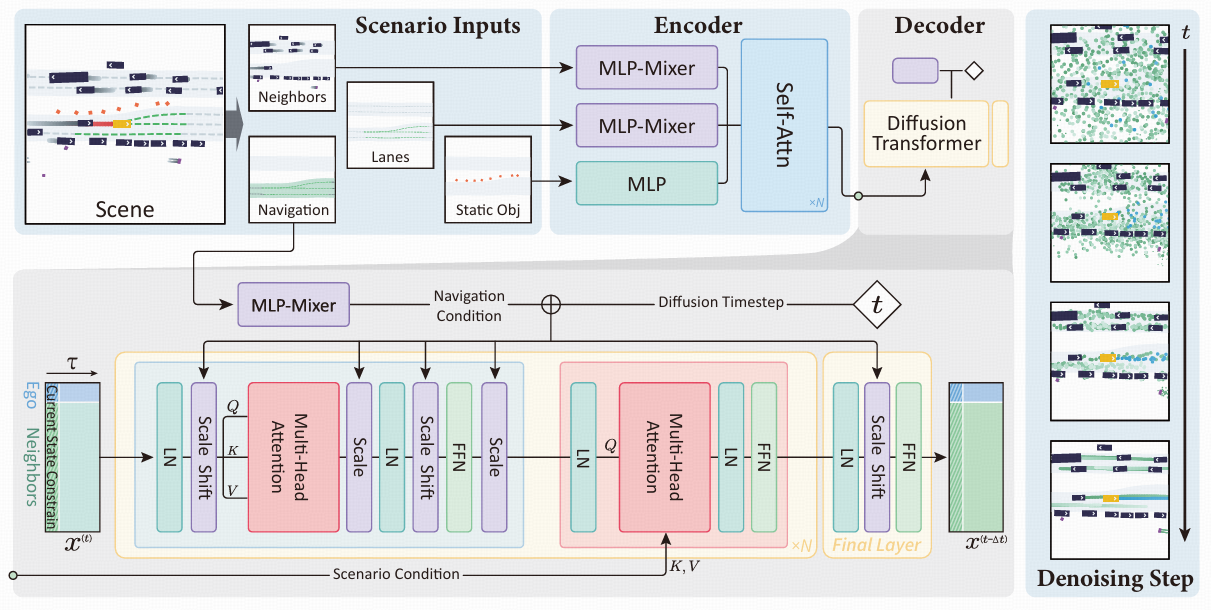
2.2. 基于 Diffusion Transformer 的生成式轨迹建模
- 架构核心为 Diffusion Transformer(DiT),融合扩散建模与注意力机制;
- 采用扩散模型的前向加噪与反向去噪过程生成未来轨迹;
- 具备强建模能力,适应复杂多模态交通行为。
2.3 多源感知输入结构化表达
- 使用轻量级编码器提取以下环境感知数据:
- 周车历史轨迹与当前状态;
- 道路拓扑结构与静态障碍物;
- 目标导航信息;
- 通过 交叉注意力机制 与加噪后的初始轨迹进行深度融合,提升轨迹生成准确性。
2.4. 起始状态引导
- 避免模型复现已有历史轨迹,破坏规划多样性;
- 仅使用 自车当前位姿(位置+朝向) 与周车当前状态,拼接进初始轨迹;
- 提供有效初态引导,减轻去噪任务难度,提升 闭环执行稳定性。
2.5. 扩散引导机制,偏好可控轨迹生成
- 在测试/部署阶段引入可控目标(如安全性、舒适性、速度偏好等);
- 多偏好通过 加权组合方式灵活调控;
- 可启用/禁用偏好机制以适配不同场景需求,提升策略灵活性与适应性。
3. 商业前景
- Robotaxi 和 Robo-Logistics(无人货运):复杂城市场景下对灵活轨迹生成的刚需;
- 乘用车辅助驾驶系统(L2+ / L3):需要高安全、稳定、可调控的规划策略;
- 智能交通系统(ITS)仿真平台:用于城市交通建模与仿真;
- 自适应路径规划机器人:在城市配送、园区清洁、巡检等场景中部署。






![[STM32问题解决(2)]STM32通过串口与PC通信,打开串口助手后无法在打开状态下下载程序和复位STM32](https://i-blog.csdnimg.cn/direct/b70a040cf1974bdfb3cb62e000e3b6f3.png)