“箱式不确定集(Box Uncertainty Set)”可以被认为是一种 相对简单但实用的不确定集建模方式。
✅ 一、什么是“简单的不确定集”?
在鲁棒优化领域,“简单不确定集”通常指的是:
| 特点 | 描述 |
|---|---|
| 形式直观 | 数学表达简洁,易于理解和实现 |
| 易于求解 | 可以通过线性化等手段转化为标准 MILP 模型 |
| 参数可调 | 具有少量关键参数,便于调整保守程度 |
| 计算效率高 | 不会显著增加模型复杂度或计算时间 |
而“箱式不确定集”正好具备这些特点,因此可以被归类为一种简单的不确定集。
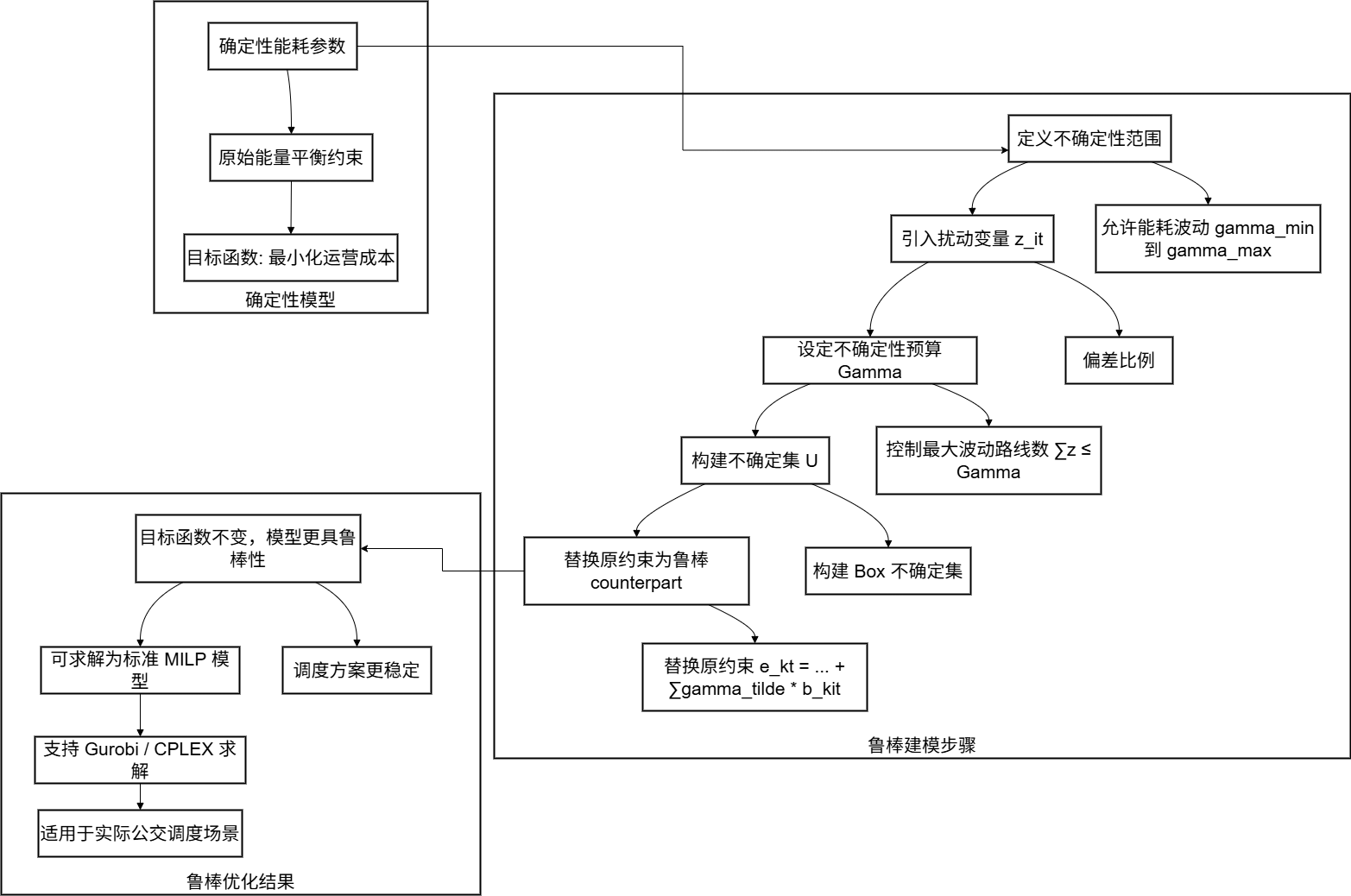
🧩 二、论文中的箱式不确定集具体形式
根据你提供的内容,论文中使用了如下形式的不确定性能耗建模:
✅ 能耗不确定性范围定义:
γ ~ i ∈ [ γ i , γ i + γ ^ i ] , ∀ i ∈ I \tilde{\gamma}_i \in [\gamma_i, \gamma_i + \hat{\gamma}_i], \quad \forall i \in I γ~i∈[γi,γi+γ^i],∀i∈I
即:每条路线 $ i $ 的实际能耗可以在基准值 $ \gamma_i $ 到最大偏差 $ \hat{\gamma}_i $ 之间波动。
进一步引入扰动变量 $ z_{i,t} \in [0,1] $,表示当前时刻 t 对应路线 i 的能耗偏差比例:
γ ~ i = γ i + γ ^ i ⋅ z i , t \tilde{\gamma}_i = \gamma_i + \hat{\gamma}_i \cdot z_{i,t} γ~i=γi+γ^i⋅zi,t
并加入一个不确定性预算 $ \Gamma $ 来控制最多有多少个路线可以同时出现最大偏差:
∑ i = 1 I z i , t ≤ Γ , 0 ≤ z i , t ≤ 1 \sum_{i=1}^I z_{i,t} \leq \Gamma,\quad 0 \leq z_{i,t} \leq 1 i=1∑Izi,t≤Γ,0≤zi,t≤1
三、为什么说它“简单”?
| 原因 | 说明 |
|---|---|
| 1. 结构简单 | 所有变量独立变化,不考虑变量之间的相关性 |
| 2. 线性约束 | 引入的是线性不等式和边界约束,易于嵌入 MILP 模型 |
| 3. 参数少 | 只需要设定两个参数: - 每个路线的最大偏差 γ ^ i \hat{\gamma}_i γ^i - 整体预算 Γ \Gamma Γ |
| 4. 易于扩展 | 可以方便地与现有调度模型结合,仅需修改部分约束即可 |
| 5. 求解友好 | 不会导致模型变成非线性或非凸问题,仍可用 Gurobi、CPLEX 等求解器高效处理 |
四、它的局限性(也体现了“简单”的代价)
尽管箱式不确定集结构简单、易于实现,但它也有一些明显的局限性,这也是它被称为“简单”的原因:
| 局限性 | 描述 |
|---|---|
| 1. 过于保守 | 当多个变量同时达到最大偏差时,可能导致不必要的高成本策略 |
| 2. 忽略变量相关性 | 实际中某些路线的能耗可能高度相关(如相同时间段、相同线路),但该模型假设它们相互独立 |
| 3. 偏差分布均匀性假设 | 所有路线都被赋予相同的不确定性建模方式,未考虑不同路线的实际波动差异 |
| 4. 不考虑历史数据分布 | 没有利用历史能耗数据进行更精确的概率建模 |
五、与其他不确定集对比
| 不确定集类型 | 是否简单 | 是否考虑相关性 | 是否可求解 | 是否适合实时应用 |
|---|---|---|---|---|
| 箱式(Box) | ✅ 是 | ❌ 否 | ✅ 是 | ✅ 是 |
| 椭球(Ellipsoidal) | ❌ 否 | ✅ 是 | ❌ 否(需求解 SOCP) | ❌ 否 |
| 多面体+预算(Budgeted RO) | ✅ 是 | ✅ 部分 | ✅ 是 | ✅ 是 |
| 数据驱动(Data-driven) | ❌ 否 | ✅ 是 | ❌ 否(依赖预测模型) | ❌ 否 |
| 分布式鲁棒(DRO) | ❌ 否 | ✅ 是 | ❌ 否(需求解复杂优化问题) | ❌ 否 |
从上表可以看出,箱式不确定集在所有不确定集中是最简单的一种建模方式,适用于对建模复杂度要求不高、但需要快速部署的工程场景。
六、论文中的验证结果(是否有效?)
虽然它是“简单的不确定集”,但在论文中已经通过实验验证了其有效性:
- 在 $ \Gamma = 10, \xi = 0.5 $ 的设置下,总运营成本上升了 28.77%;
- 但相比 BAU(Business As Usual)场景,仍然节省了 11.76% 的成本;
- 更重要的是,系统可靠性大幅提升,避免了低电量导致的任务中断风险。
这说明:
即使是一个简单的不确定集,在面对电动公交充电调度这类现实问题时,也能发挥重要作用。