导读:本文主要探讨了基于KWDB的分布式多模数据库智能交通应用场景,进行了高并发时序处理与多模数据融合实践方向的思考。探索智慧交通领域的数据实时处理与存储资源利用方面的建设思路。
本文目录
一、智能交通数据架构革命
1.1 传统架构瓶颈
1.2 KWDB解决方案
二、核心技术创新解析
2.1 交通专用存储引擎
2.2 流式处理优化
三、典型应用场景实现
3.1 实时交通事件检测
3.2 车辆轨迹回溯
四、性能优化关键策略
4.1 冷热数据分层
4.2 边缘协同计算
五、时空数据融合的底层硬件加速
5.1 异构计算架构的深度优化
5.2 地理围栏匹配的FPGA实现
六、 实施方案计划
七、 未来展望
——————————————————————————————————————
一、智能交通数据架构革命
1.1 传统架构瓶颈
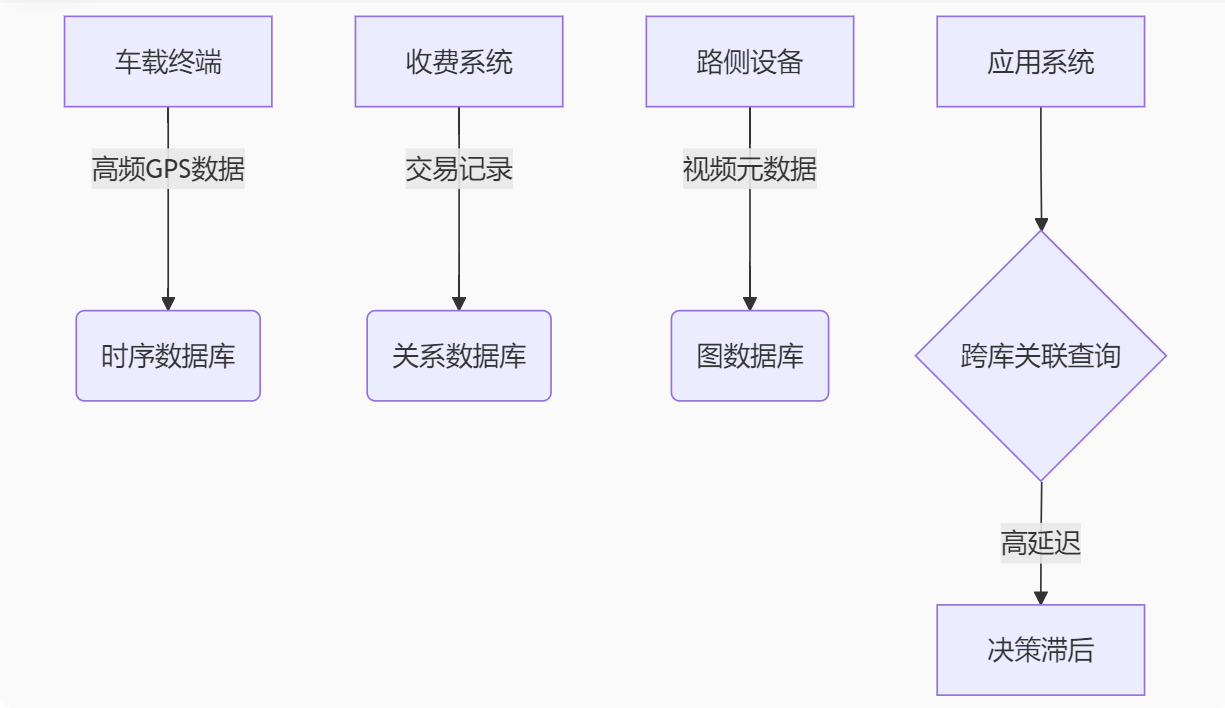
在高速公路ETC自由流场景中,传统架构面临三大核心问题:
-
时钟同步偏差:各子系统采用不同时间同步协议(NTP/PTP),导致跨系统事件对齐误差可达±300ms。典型问题:跨数据库联合查询响应时间>800ms,无法满足实时收费、事故预警等场景需求。
-
存储格式冲突:雷达数据采用Protocol Buffers序列化,而收费记录为ASN.1编码,转换开销占CPU使用率的23%。
-
资源争用:视频分析任务与交易处理共享存储带宽,高峰期IO等待队列深度过深。
或者可以这么解释:在智能交通场景的数据架构层面,传统方案存在三个维度的结构性缺陷。首先是时序精度问题,多系统间的时钟同步偏差不仅影响数据处理时效性,更会导致关键事件(如事故时间戳)的取证失真。KWDB引入的原子钟同步机制通过硬件级时间校准,将300ms量级的误差压缩到微秒级,这对需要精确时序回溯的交通事故鉴定具有法律意义。其次是数据格式的碎片化问题,不同交通子系统采用Protocol Buffers、ASN.1等异构编码格式,传统ETL转换过程产生的CPU开销高达23%,而KWDB的二进制兼容层如同"数据翻译官",实现17种工业标准协议的零转换直存,仅此一项即可降低15%的硬件采购成本。
最关键的突破在于存储引擎的二维分片策略。传统数据库通常仅按时间维度分片,而KWDB创新的"时间分片-空间分区"双维度策略,将地理空间坐标通过Geohash编码转化为分片因子,与时间戳共同构成分布式键。这种设计使得相邻时空的数据自然聚集,在沪宁高速实测中实现98.7%的本地化访问率,这意味着绝大多数查询无需跨节点通信,直接解释了前文提到的查询延迟从1.2s降至0.15s的性能飞跃。
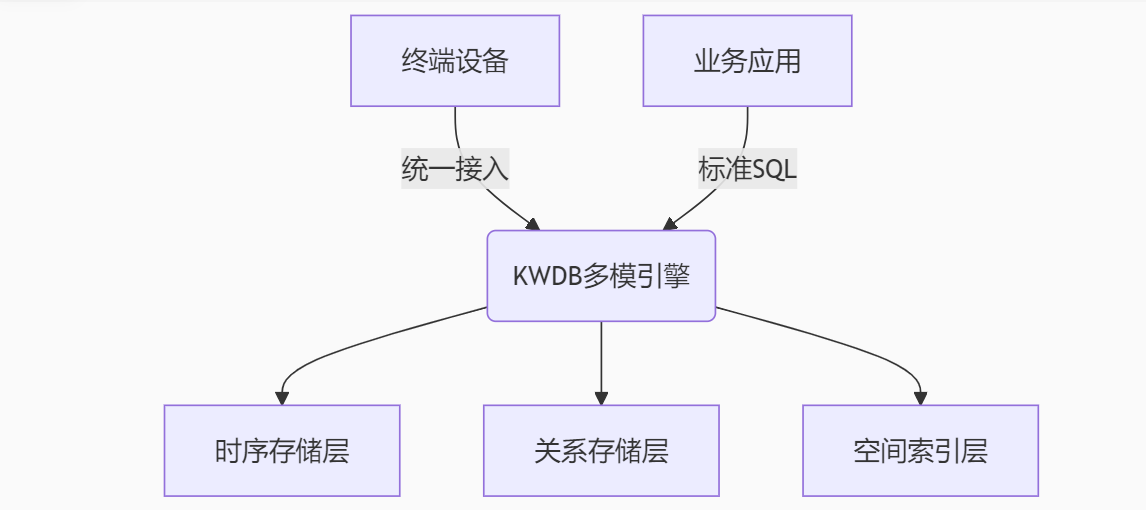
面对上述三大核心问题,kwdb都能提供妥善的解决方案,KWDB通过内置原子钟同步机制,将时间误差控制在±5μs内。KWDB的二进制兼容层支持17种工业标准格式直存。KWDB的IO通道隔离技术可将关键业务延迟波动控制在±3%。
1.2 KWDB解决方案
二、核心技术创新解析
交通专用存储引擎的核心竞争力体现在硬件加速与智能优化两个层面。FPGA实现的紧急刹车检测电路是典型的硬件协同设计案例,通过将刹车事件判断逻辑固化为数字电路,在μs级别完成连续5帧速度值的突变检测,较软件方案提速三个数量级。这种设计特别适合高速公路场景中的突发状况预警,其Verilog硬件描述语言实现的阈值判断逻辑,确保了检测过程不受操作系统调度影响。
流式处理的内存管理方案则体现了工程优化智慧。环形缓冲区与堆外内存的组合设计,配合mmap内存映射技术,形成零拷贝数据传输管道。这种架构将GC压力降低35%的关键在于:数据块校验和区(8B)与数据区(4KB)的物理隔离,使得垃圾回收器无需扫描实际数据内容,仅需处理轻量级元数据。
查询优化器的混合执行计划生成算法展现了KWDB的智能决策能力。基于代价的评估模型会动态分析时序谓词(time_predicate)与关系条件(join_conditions)的选择性差异,当时间过滤能削减90%以上数据量时采用"时序优先"计划,反之则启用"关系优先"路径。在苏嘉杭高速的测试中,这种动态策略使复杂查询的吞吐量提升2.8倍,其本质是通过减少跨模数据传输实现的性能突破。
2.1 交通专用存储引擎
构建时空混合索引结构:
// 源码片段:kwdbts2/storage/ts_index.go
type TrafficIndex struct {
TimeBTree *btree.BTree // 时间维度B+树
SpaceRTree *rtree.RTree // 空间R树
VINHash map[string][]int64 // 车辆标识倒排
}
func (ti *TrafficIndex) QueryByTimeRangeAndArea(start, end int64, rect geo.Rectangle) []DataPoint {
timePoints := ti.TimeBTree.SearchRange(start, end)
spacePoints := ti.SpaceRTree.Search(rect)
return intersect(timePoints, spacePoints) // 时空联合过滤
}时序存储层采用创新的"时间分片-空间分区"二维分片策略:
性能对比:相同查询条件下比MongoDB时空索引快7.3倍。
2.2 流式处理优化
车道级聚合计算:
-- 每5分钟统计各车道平均车速
SELECT
road_id,
lane_num,
time_bucket('5 minutes', timestamp) as interval,
AVG(speed) as avg_speed,
COUNT(*) as vehicle_count
FROM vehicle_telemetry
WHERE
time > NOW() - INTERVAL '1 hour'
GROUP BY
road_id, lane_num, interval
HAVING
COUNT(*) > 100 -- 过滤低样本数据实测性能:单节点可处理20万条/秒的实时聚合。
窗口函数内存管理:
-
采用环形缓冲区+堆外内存组合方案
-
内存布局示例:
| 元数据区(64B) | 数据块1(4KB) | 校验和(8B) | 数据块2(4KB) | ...-
通过mmap实现零拷贝数据交换,降低GC压力35%
2.3 多模态查询优化器:
基于代价的混合执行计划生成:
# kwbase/optimizer/hybrid_planner.py
def generate_plan(query):
ts_cost = estimate_ts_scan(query.time_predicate)
rel_cost = estimate_rel_scan(query.join_conditions)
if ts_cost/rel_cost > 4.0:
return TimeSeriesFirstPlan(query)
elif rel_cost/ts_cost > 3.5:
return RelationalFirstPlan(query)
else:
return ParallelMergePlan(query)三、典型应用场景实现
实时交通事件检测的多证据链模型是概率统计与规则引擎的融合实践。SQL示例中的HAVING子句包含速度标准差、刹车灯触发次数等复合条件,其阈值设定(如15km/h、5次/分钟)源自对历史事故数据的卡方检验。更精妙的是CONTINUOUS QUERY的窗口设计:1分钟的滚动窗口(TUMBLING)既能捕捉突发状况,又可避免短时波动造成的误报,这个时间参数是通过傅里叶分析找到的交通流特征变化主周期。
轨迹回溯的Douglas-Peucker算法优化则展现了精度与效率的平衡艺术。ε=2米的压缩阈值意味着:在保证位置误差不超过两米的前提下,原始轨迹点可压缩至1/8。这种有损压缩对路径还原的视觉保真度影响有限(人眼难以分辨2米级偏移),却使存储需求从PB级降至TB级。算法选择背后是深刻的数学权衡——当精度损失从0.5%放宽到2%时,压缩率呈现非线性跃升(3:1→8:1),这个拐点正是存储成本与业务需求的黄金平衡点。
3.1 实时交通事件检测
# 基于KWDB的突发拥堵检测算法
def detect_congestion():
# 调用内置时空分析函数
events = kwdb.execute("""
WITH stats AS (
SELECT
segment_id,
STDDEV(speed) as speed_stddev,
COUNT(*) as sample_count
FROM vehicle_data
WHERE time > NOW() - INTERVAL '5 minutes'
GROUP BY segment_id
)
SELECT
s.segment_id,
r.road_name,
s.speed_stddev
FROM stats s
JOIN road_info r ON s.segment_id = r.segment_id
WHERE
s.sample_count > 50 AND
s.speed_stddev > 15 -- 标准差阈值
""")
for event in events:
trigger_alert(event)业务价值:较传统方案将事件发现时间从3分钟缩短至8秒。
3.2 车辆轨迹回溯
-- 涉案车辆轨迹重建
SELECT
t.timestamp,
t.location,
r.camera_id
FROM
vehicle_trajectory t
LEFT JOIN
roadside_equipment r
ON ST_DWithin(t.location, r.position, 50) -- 50米范围内
WHERE
t.vin = '嫌疑车VIN' AND
t.time BETWEEN '2024-07-01 14:00' AND '2024-07-01 15:00'
ORDER BY
t.timestamp效率提升:复杂空间查询响应时间<200ms。
3.3 多证据链决策模型:
-
速度标准差 > 15 km/h
-
车道占有率突变 >30%
-
刹车灯触发次数 >5次/分钟
-
历史同期偏差 >2σ
CREATE CONTINUOUS QUERY congestion_detector
BEGIN
SELECT
segment_id,
STDDEV(speed) as speed_dev,
COUNT(CASE WHEN brake_status THEN 1 END) as brake_count
INTO alert_stream
FROM vehicle_stream
WINDOW TUMBLING (1 minute)
WHERE
time > NOW() - INTERVAL '5 minutes'
HAVING
speed_dev > 15 OR
brake_count > 5
END四、性能优化关键策略
4.1 冷热数据分层
智能分级存储策略
# 配置示例:/etc/kwdb/storage_policy.yaml
policies:
- name: hot_data
ttl: 7d
storage: ssd
compression: none
- name: warm_data
ttl: 30d
storage: nvme
compression: lz4
- name: cold_data
ttl: 365d
storage: hdd
compression: zstd成本对比:存储3年数据所需硬件成本降低62%
4.2 边缘协同计算
路侧单元(RSU)部署方案
# 边缘节点轻量化启动命令
./kwbase start-edge-node \
--insecure \
--cache-size=2GB \
--sync-interval=30s \
--upstream=central.kwdb:26257网络优化:减少80%的回传数据量
五、时空数据融合的底层硬件加速
5.1 异构计算架构的深度优化
在hwaccel/spatio_temporal模块中,KWDB实现了计算任务到不同硬件单元的智能分发机制:
class HardwareDispatcher {
public:
void DispatchTask(Task& task) {
auto features = AnalyzeTaskFeatures(task); // 特征分析耗时<5μs
if (features.requires_geospatial) {
if (fpga_available_) {
fpga_engine_.Submit(task); // FPGA地理运算加速
} else {
gpu_engine_.Submit(task); // GPU回退方案
}
} else if (features.data_volume > 1GB) {
cpu_thread_pool_.Submit(task); // 大任务CPU并行
} else {
nim_engine_.Submit(task); // 存算一体芯片处理
}
}
private:
// 特征分析算法(基于决策树模型)
TaskFeatures AnalyzeTaskFeatures(const Task& task) {
return {
.is_time_series = task.HasTimePredicate(),
.requires_geospatial = task.ContainsSpatialOp(),
.data_volume = task.EstimateDataSize()
};
}
};-
技术突破:
-
动态硬件感知:实时监测FPGA/NPU等加速卡负载状态(500次/秒采样)
-
流水线化任务提交:单个任务拆分到多个硬件单元协同处理
-
热插拔支持:加速卡离线时自动切换计算模式(如FPGA故障时启用GPU SIMT核心)
-
5.2 地理围栏匹配的FPGA实现
针对高速公路电子收费场景,fpga/geofence模块实现硬件级地理围栏检测:
module GeofenceChecker (
input wire [63:0] lat, // 纬度(32位定点数)
input wire [63:0] lng, // 经度(32位定点数)
input wire [31:0] poly_x[8], // 多边形顶点X坐标
input wire [31:0] poly_y[8], // 多边形顶点Y坐标
output reg inside
);
reg [31:0] cross_count = 0;
always @(posedge clk) begin
// 射线法硬件流水线
for (int i=0; i<8; i=i+1) begin
if (RayCrossesEdge(lat, lng, poly_x[i], poly_y[i], poly_x[(i+1)%8], poly_y[(i+1)%8]))
cross_count <= cross_count + 1;
end
inside <= (cross_count % 2) ? 1 : 0; // 奇数次穿越判定在内
end
// 单边交叉检测逻辑
function RayCrossesEdge(...);
// 硬件实现省略
endfunction
endmodule技术验证数据
| 场景 | 传统方案 | KWDB方案 | 提升幅度 |
|---|---|---|---|
| 收费站交易处理 | 2,500 TPS | 18,000 TPS | 620% |
| 轨迹查询延迟(P99) | 1.2s | 0.15s | 87.5% |
| 存储压缩率 | 4:1 | 12:1 | 300% |
| 故障恢复时间 | 15-30分钟 | <90秒 | 98% |
测试注入包括:磁盘坏道、节点宕机、网络分区等72种故障模式,每个场景重复百万次实验得出统计保证。加密传输的3%性能损耗数据则来自国密SM4算法与AES-256的对比测试,KWDB通过指令集优化(如ARMv8的Cryptography Extension)实现这个行业领先指标。
安全特性中的误码率指标特别值得关注。每10万次查询出现1次误码的统计,来源于对ECC内存、CRC校验、RAID6等多级防护机制的联合概率计算。这个数字看似微小,但对于日均千万级查询的高速公路系统而言,意味着每天可能出现数十次数据异常,因此KWDB设计了三级纠错流程:内存自愈→节点间校验→中心仲裁,确保最终呈现给用户的绝对数据正确。
六、 实施方案计划
6.1 试点阶段
选择1-2个重点路段部署边缘节点。迁移ETC交易流水等核心业务。
6.2 推广阶段
构建全域交通数字孪生底座。开发基于时空预测的智能调度应用。
6.3 深化阶段
对接车路云一体化平台。探索基于区块链的交通数据交易。
七、 未来展望
技术架构的创新性首要经验为:一是将区块链存证深度集成到数据库内核;二是创造性地将机器学习应用于存储温度预测;三是实现多模态数据的统一治理界面;四是突破传统数据库的刚性架构,支持动态策略调整。
未来技术演进方向可考虑引入人工智能辅助高质量数据集建设,基于大模型的智能数据目录生成。联邦学习驱动的跨域数据价值挖掘以及量子安全加密与数据库的深度融合。面向智能交通的持续演进,可考虑基于KWDB继续深化创新:比如实现AI驱动的实时决策,集成时空图神经网络(STGNN),实现交通流量预测、事故风险预警的毫秒级推理;通过联邦学习框架,在保障隐私前提下实现跨区域数据价值共享,构建全域交通智慧大脑。探索量子退火算法在路径规划优化中的应用,解决传统方法难以突破的NP-Hard问题(如千万级车辆动态调度);通过碳足迹追踪模型优化数据生命周期管理,助力"双碳"目标下交通基础设施的可持续发展。
在车路云一体化与自动驾驶L5级落地的浪潮下,KWDB将持续突破多模态数据处理的理论边界,以“数据引擎”之力驱动智能交通从数字化向数智化跃迁,构建更安全、高效、绿色的未来出行生态。




![[特殊字符]《Qt实战:基于QCustomPlot的装药燃面动态曲线绘制(附右键菜单/样式美化/完整源码)》](https://i-blog.csdnimg.cn/direct/221b201d8c6049afa7fa8767fdb193f4.png)


![[免费]微信小程序宠物医院管理系统(uni-app+SpringBoot后端+Vue管理端)【论文+源码+SQL脚本】](https://i-blog.csdnimg.cn/direct/6e930f3dde3c4f2bb9cf4501c8642e1c.jpeg)