DAY 34 GPU训练及类的call方法
知识点回归:
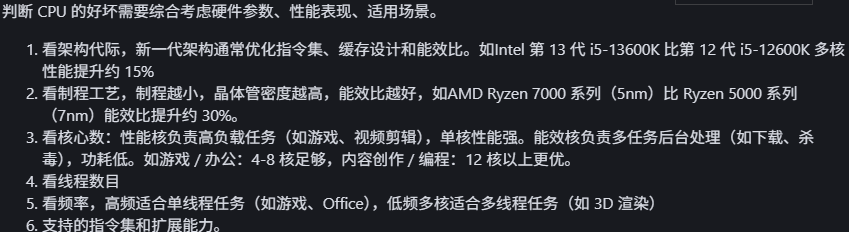
- CPU性能的查看:看架构代际、核心数、线程数
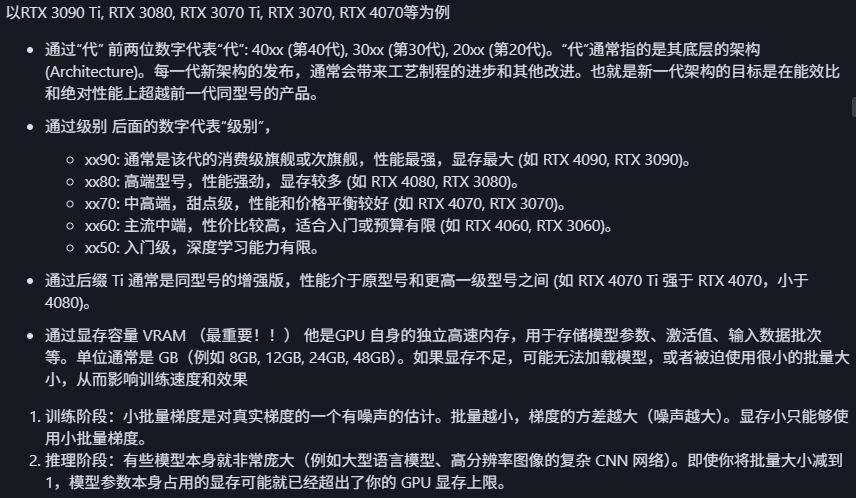
- GPU性能的查看:看显存、看级别、看架构代际
- GPU训练的方法:数据和模型移动到GPU device上
- 类的call方法:为什么定义前向传播时可以直接写作self.fc1(x)
作业
复习今天的内容,在巩固下代码。思考下为什么会出现这个问题。
CPU性能解读:
import wmi
c = wmi.WMI()
processors = c.Win32_Processor()
for processor in processors:
print(f"CPU 型号: {processor.Name}")
print(f"核心数: {processor.NumberOfCores}")
print(f"线程数: {processor.NumberOfLogicalProcessors}")利用上述代码可以查看基本的CPU信息
GPU性能解读:
#使用这段代码来检查CUDA是否可以用
import torch
# 检查CUDA是否可用
if torch.cuda.is_available():
print("CUDA可用!")
# 获取可用的CUDA设备数量
device_count = torch.cuda.device_count()
print(f"可用的CUDA设备数量: {device_count}")
# 获取当前使用的CUDA设备索引
current_device = torch.cuda.current_device()
print(f"当前使用的CUDA设备索引: {current_device}")
# 获取当前CUDA设备的名称
device_name = torch.cuda.get_device_name(current_device)
print(f"当前CUDA设备的名称: {device_name}")
# 获取CUDA版本
cuda_version = torch.version.cuda
print(f"CUDA版本: {cuda_version}")
# 查看cuDNN版本(如果可用)
print("cuDNN版本:", torch.backends.cudnn.version())
else:
print("CUDA不可用。")昨天提到了CPU的训练方式,今天接触GPU训练:
# 加载鸢尾花数据集
iris = load_iris()
X = iris.data # 特征数据
y = iris.target # 标签数据
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 归一化数据
from sklearn.preprocessing import MinMaxScaler
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
# 将数据转换为PyTorch张量并移至GPU
# 分类问题交叉熵损失要求标签为long类型
# 张量具有to(device)方法,可以将张量移动到指定的设备上
X_train = torch.FloatTensor(X_train).to(device)
y_train = torch.LongTensor(y_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_test = torch.LongTensor(y_test).to(device)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(4, 10)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10, 3)
def forward(self, x):
out = self.fc1(x)
# 定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练模型
num_epochs = 20000
losses = []
start_time = time.time()
for epoch in range(num_epochs):
# 前向传播
outputs = model(X_train)
loss = criterion(outputs, y_train)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 记录损失值
losses.append(loss.item())
# 打印训练信息
if (epoch + 1) % 100 == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}')
time_all = time.time() - start_time
print(f'Training time: {time_all:.2f} seconds')
# 可视化损失曲线
plt.plot(range(num_epochs), losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training Loss over Epochs')
plt.show()
out = self.relu(out)
out = self.fc2(out)
return out
# 实例化模型并移至GPU
# MLP继承nn.Module类,所以也具有to(device)方法
model = MLP().to(device)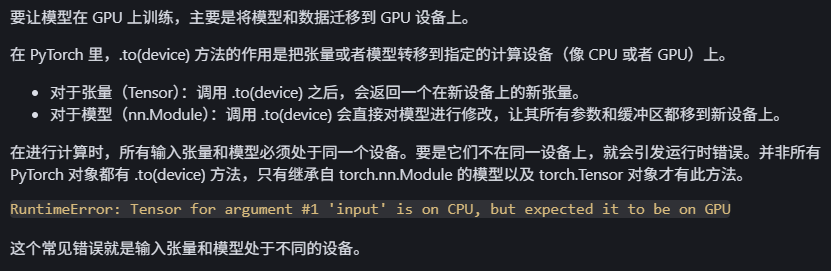
这里MLP是nn.Module类中的方法,所以直接用to(device)方法就可以将模型转移到GPU。
这是训练20000轮的损失变化 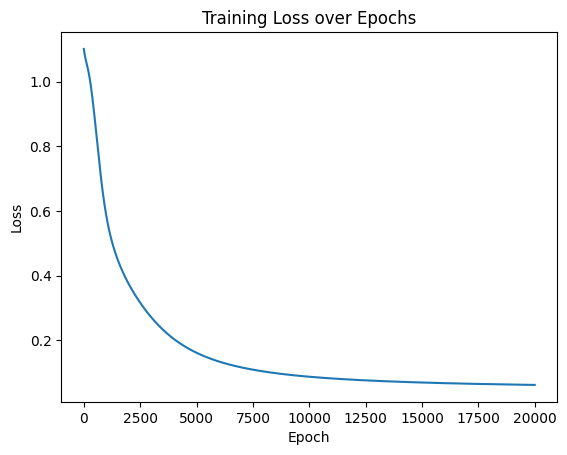
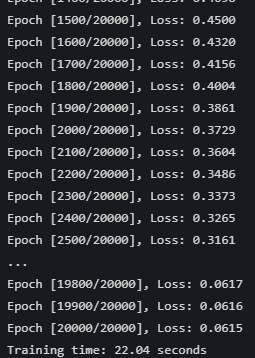 但是奇怪的是,昨天用CPU跑整个过程只用了3秒,为什么有CUDA加速的GPU却要跑22秒呢?
但是奇怪的是,昨天用CPU跑整个过程只用了3秒,为什么有CUDA加速的GPU却要跑22秒呢?
本质是因为GPU在计算的时候,相较于cpu多了3个时间上的开销
1. 数据传输开销 (CPU 内存 <-> GPU 显存)
2. 核心启动开销 (GPU 核心启动时间)
3. 性能浪费:计算量和数据批次
数据传输开销 (CPU 内存 <-> GPU 显存)
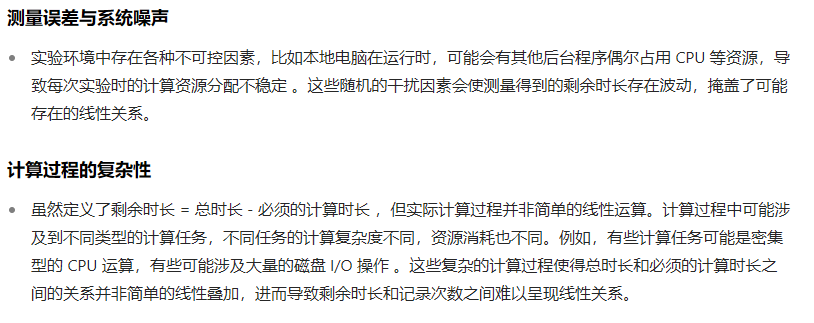
在 GPU 进行任何计算之前,数据(输入张量 X_train、y_train,模型参数)需要从计算机的主内存 (RAM) 复制到 GPU 专用的显存 (VRAM) 中。 当结果传回 CPU 时(例如,使用 loss.item() 获取损失值用于打印或记录,或者获取最终预测结果),数据也需要从 GPU 显存复制回 CPU 内存。
对于少量数据和非常快速的计算任务,这个传输时间可能比 GPU 通过并行计算节省下来的时间还要长。
在上述代码中,循环里的 loss.item() 操作会在每个 epoch 都进行一次从 GPU 到 CPU 的数据同步和传输,以便获取标量损失值。对于20000个epoch来说,这会累积不少的传输开销。
核心启动开销 (GPU 核心启动时间)
GPU 执行的每个操作(例如,一个线性层的前向传播、一个激活函数)都涉及到在 GPU 上启动一个“核心”(kernel)——一个在 GPU 众多计算单元上运行的小程序。
启动每个核心都有一个小的、固定的开销。
如果核心内的实际计算量非常小(本项目的小型网络和鸢尾花数据),这个启动开销在总时间中的占比就会比较大。相比之下,CPU 执行这些小操作的“调度”开销通常更低。
性能浪费:计算量和数据批次
这个数据量太少,gpu的很多计算单元都没有被用到,即使用了全批次也没有用到的全部计算单元。
那么什么时候 GPU 会发挥巨大优势?
大型数据集: 例如,图像数据集成千上万张图片,每张图片维度很高。
大型模型: 例如,深度卷积网络 (CNNs like ResNet, VGG) 或 Transformer 模型,它们有数百万甚至数十亿的参数,计算量巨大。
合适的批处理大小: 能够充分利用 GPU 并行性的 batch size,不至于还有剩余的计算量没有被 GPU 处理。
复杂的、可并行的运算: 大量的矩阵乘法、卷积等。
针对上面反应的3个问题,能够优化的只有数据传输时间,针对性解决即可,很容易想到2个思路:
1. 直接不打印训练过程的loss了,但是这样会没办法记录最后的可视化图片,只能肉眼观察loss数值变化。
import time
start_time = time.time() # 记录开始时间
for epoch in range(num_epochs): # range是从0开始,所以epoch是从0开始
# 前向传播
outputs = model.forward(X_train) # 显式调用forward函数
# outputs = model(X_train) # 常见写法隐式调用forward函数,其实是用了model类的__call__方法
loss = criterion(outputs, y_train) # output是模型预测值,y_train是真实标签
# 反向传播和优化
optimizer.zero_grad() #梯度清零,因为PyTorch会累积梯度,所以每次迭代需要清零,梯度累计是那种小的bitchsize模拟大的bitchsize
loss.backward() # 反向传播计算梯度
optimizer.step() # 更新参数
# 记录损失值
# losses.append(loss.item())
# 打印训练信息
if (epoch + 1) % 100 == 0: # range是从0开始,所以epoch+1是从当前epoch开始,每100个epoch打印一次
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}')
time_all = time.time() - start_time # 计算训练时间
print(f'Training time: {time_all:.2f} seconds')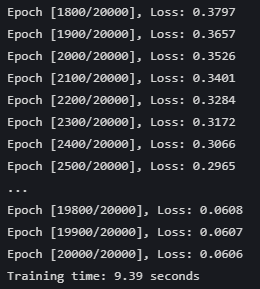 这次时间变成了9秒,说明计算损失这一步在数据传输过程中占据了很多时间。
这次时间变成了9秒,说明计算损失这一步在数据传输过程中占据了很多时间。
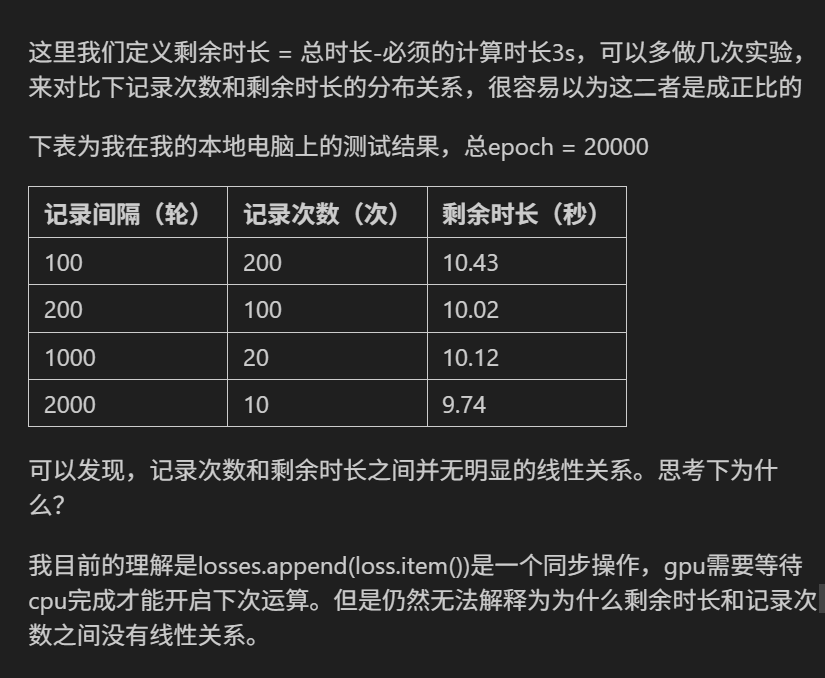
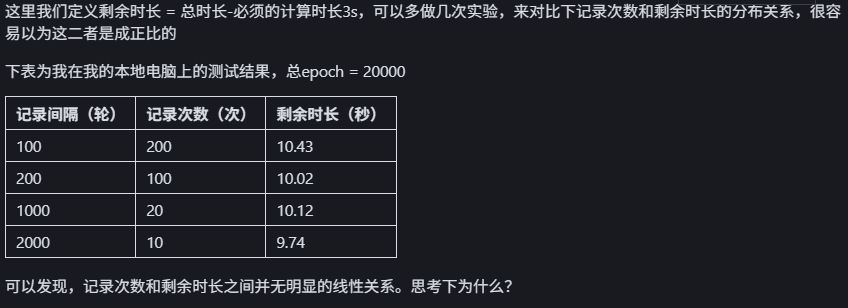
2. 每隔200个epoch保存一下loss,不需要20000个epoch每次都打印,
import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import time
import matplotlib.pyplot as plt
# 设置GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")
# 加载鸢尾花数据集
iris = load_iris()
X = iris.data # 特征数据
y = iris.target # 标签数据
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 归一化数据
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
# 将数据转换为PyTorch张量并移至GPU
X_train = torch.FloatTensor(X_train).to(device)
y_train = torch.LongTensor(y_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_test = torch.LongTensor(y_test).to(device)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(4, 10) # 输入层到隐藏层
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10, 3) # 隐藏层到输出层
def forward(self, x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
# 实例化模型并移至GPU
model = MLP().to(device)
# 分类问题使用交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 使用随机梯度下降优化器
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练模型
num_epochs = 20000 # 训练的轮数
# 用于存储每100个epoch的损失值和对应的epoch数
losses = []
start_time = time.time() # 记录开始时间
for epoch in range(num_epochs):
# 前向传播
outputs = model(X_train) # 隐式调用forward函数
loss = criterion(outputs, y_train)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 记录损失值
if (epoch + 1) % 200 == 0:
losses.append(loss.item()) # item()方法返回一个Python数值,loss是一个标量张量
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}')
time_all = time.time() - start_time # 计算训练时间
print(f'Training time: {time_all:.2f} seconds')
# 可视化损失曲线
plt.plot(range(len(losses)), losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training Loss over Epochs')
plt.show()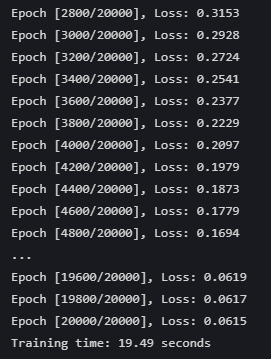 这样时间也可以变短
这样时间也可以变短
Call方法
# 我们来看下昨天代码中你的定义函数的部分
class MLP(nn.Module): # 定义一个多层感知机(MLP)模型,继承父类nn.Module
def __init__(self): # 初始化函数
super(MLP, self).__init__() # 调用父类的初始化函数
# 前三行是八股文,后面的是自定义的
self.fc1 = nn.Linear(4, 10) # 输入层到隐藏层
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10, 3) # 隐藏层到输出层
# 输出层不需要激活函数,因为后面会用到交叉熵函数cross_entropy,交叉熵函数内部有softmax函数,会把输出转化为概率
def forward(self, x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out可以注意到,self.fc1 = nn.Linear(4, 10) 此时,是实例化了一个nn.Linear(4, 10)对象,并把这个对象赋值给了MLP的初始化函数中的self.fc1变量。
那为什么下面的前向传播中却可以out = self.fc1(x) 呢?,self.fc1是一个实例化的对象,为什么具备了函数一样的用法,这是因为nn.Linear继承了nn.Module类,nn.Module类中定义了__call__方法。(可以ctrl不断进入来查看)
在 Python 中,任何定义了 __call__ 方法的类,其实例都可以像函数一样被调用。
当调用 self.fc1(x) 时,实际上执行的是:
- self.fc1.__call__(x)(Python 的隐式调用)
- 而 nn.Module 的 __call__ 方法会调用子类的 forward 方法(即 self.fc1.forward(x))。这个方法就是个前向计算方法。
relu是torch.relu()这个函数为了保持写法一致,又封装成了nn.ReLU()这个类。来保证接口的一致性
PyTorch 官方强烈建议使用 self.fc1(x),因为它会触发完整的前向传播流程(包括钩子函数)这是 PyTorch 的核心设计模式,几乎所有组件(如 nn.Conv2d、nn.ReLU、甚至整个模型)都可以这样调用。
# 不带参数的call方法
class Counter:
def __init__(self):
self.count = 0
def __call__(self):
self.count += 1
return self.count
# 使用示例
counter = Counter()
print(counter()) # 输出: 1
print(counter()) # 输出: 2
print(counter.count) # 输出: 2# 带参数的call方法
class Adder:
def __call__(self, a, b):
print("唱跳篮球rap")
return a + b
adder = Adder()
print(adder(3, 5)) # 输出: 8@浙大疏锦行



![Java 处理地理信息数据[DEM TIF文件数据获取高程]](https://i-blog.csdnimg.cn/direct/a387e788481b49a0a3d1f13918e08f8d.png)