目录
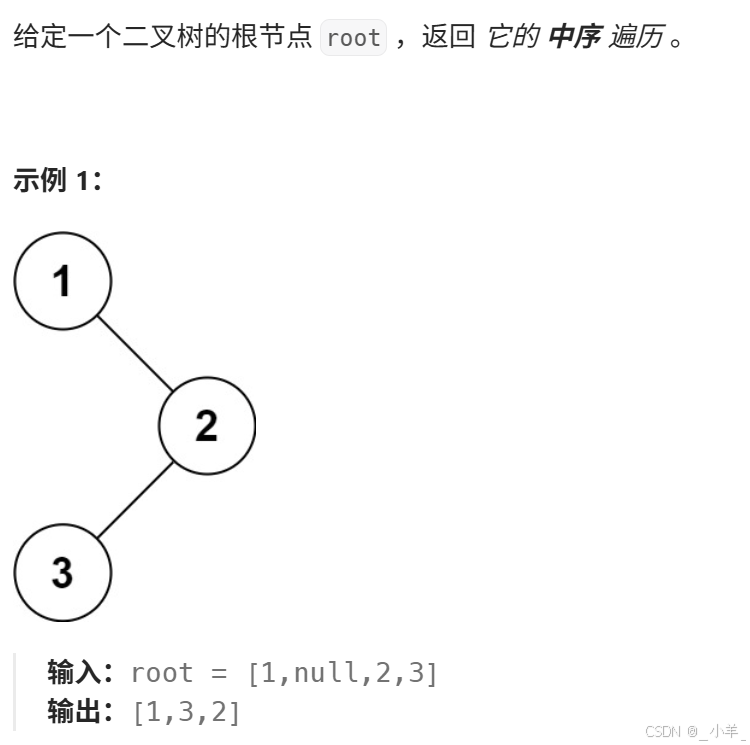
二叉树的中序遍历
- 二叉树的中序遍历
class Solution {
vector<int> res;
public:
vector<int> inorderTraversal(TreeNode* root) {
dfs(root);
return res;
}
void dfs(TreeNode* root)
{
if (root == nullptr) return;
dfs(root->left);
res.push_back(root->val);
dfs(root->right);
}
};
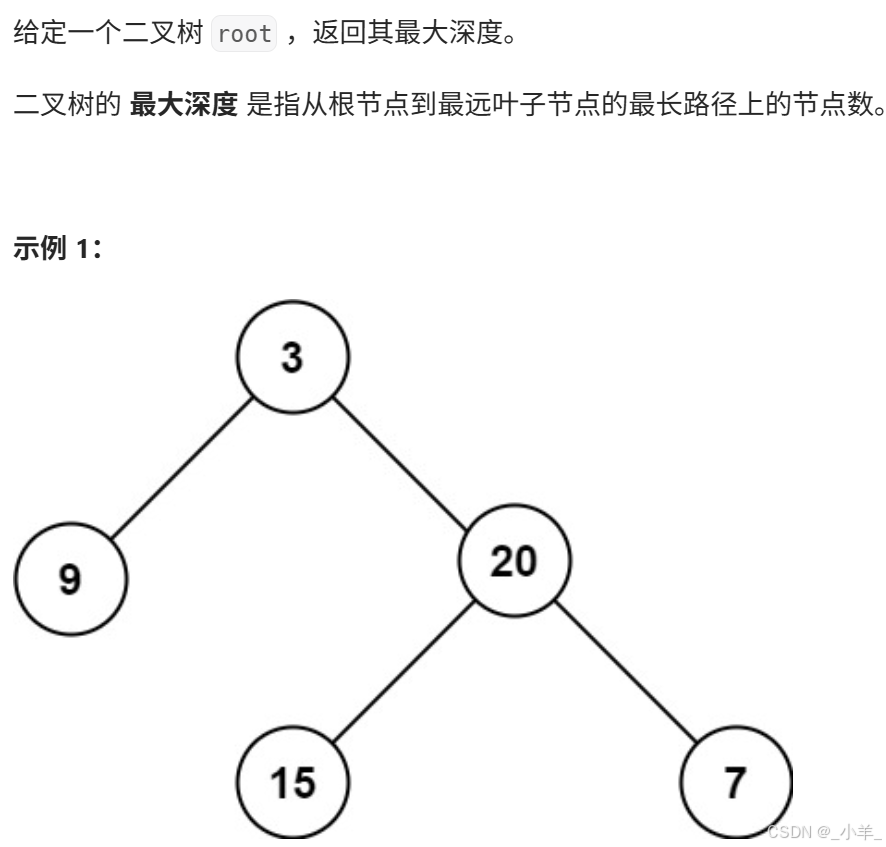
二叉树的最大深度
- 二叉树的最大深度
class Solution {
public:
int maxDepth(TreeNode* root) {
if (root == nullptr) return 0;
int left = maxDepth(root->left);
int right = maxDepth(root->right);
return left > right ? left + 1 : right + 1;
}
};
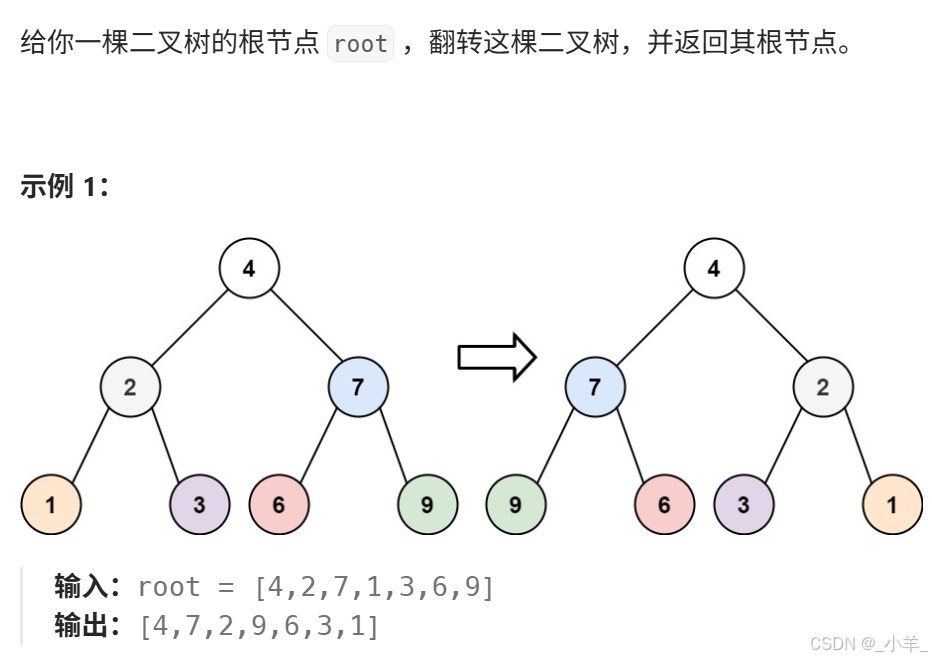
翻转二叉树
- 翻转二叉树
class Solution {
public:
TreeNode* invertTree(TreeNode* root) {
if (root == nullptr) return nullptr;
TreeNode *left = invertTree(root->left);
TreeNode *right = invertTree(root->right);
root->left = right;
root->right = left;
return root;
}
};
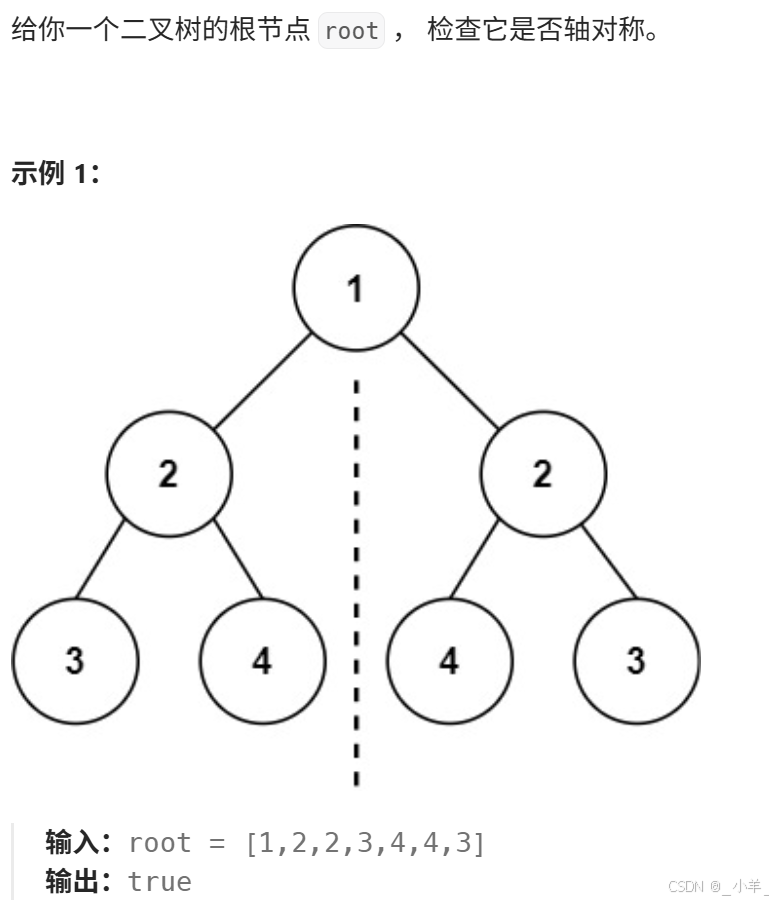
对称二叉树
- 对称二叉树
class Solution {
public:
bool isSymmetric(TreeNode* root) {
return dfs(root->left, root->right);
}
bool dfs(TreeNode* left, TreeNode* right)
{
if (left && right)
{
if (left->val != right->val) return false;
return dfs(left->left, right->right) && dfs(left->right, right->left);
}
else if (left != right) return false;
else return true;
}
};
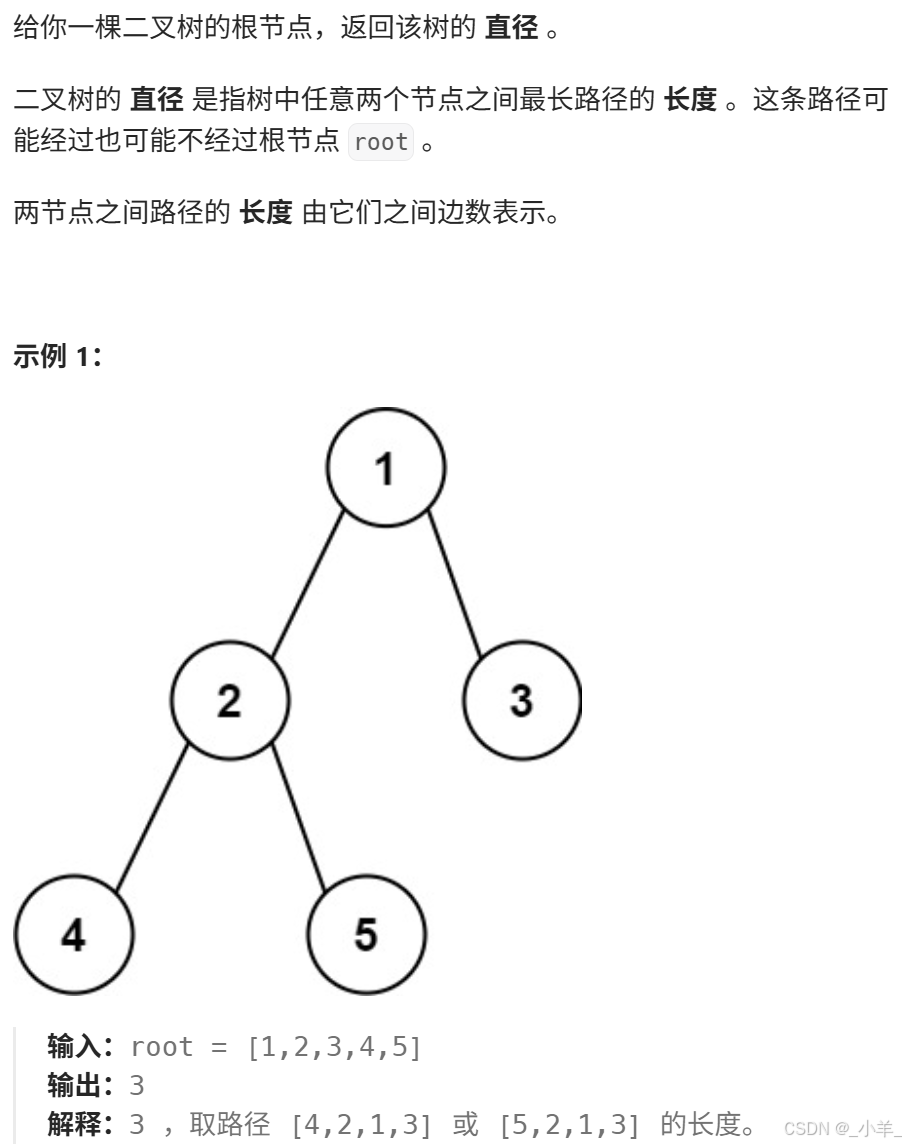
二叉树的直径
- 二叉树的直径
class Solution {
int depth;
public:
int diameterOfBinaryTree(TreeNode* root) {
dfs(root);
return depth - 1;
}
int dfs(TreeNode* root)
{
if (root == nullptr) return 0;
int left = dfs(root->left);
int right = dfs(root->right);
depth = max(depth, left + right + 1);
return max(left, right) + 1;
}
};
二叉树的层序遍历
- 二叉树的层序遍历
class Solution {
public:
vector<vector<int>> levelOrder(TreeNode* root) {
vector<vector<int>> res;
queue<TreeNode*> q;
if (root == nullptr) return res;
q.push(root);
while (q.size())
{
int sz = q.size();
vector<int> tmp;
while (sz--)
{
TreeNode *node = q.front();
tmp.push_back(node->val);
q.pop();
if (node->left) q.push(node->left);
if (node->right) q.push(node->right);
}
res.push_back(tmp);
}
return res;
}
};
将有序数组转换为二叉搜索树
- 将有序数组转换为二叉搜索树
class Solution {
public:
TreeNode* sortedArrayToBST(vector<int>& nums) {
return dfs(nums, 0, nums.size() - 1);
}
TreeNode* dfs(vector<int>& nums, int l, int r)
{
if (l > r) return nullptr;
int mid = l + (r - l) / 2;
TreeNode* node = new TreeNode(nums[mid]);
node->left = dfs(nums, l, mid - 1);
node->right = dfs(nums, mid + 1, r);
return node;
}
};
验证二叉搜索树
- 验证二叉搜索树
递归遍历。
class Solution {
public:
bool isValidBST(TreeNode* root) {
return dfs(root, LONG_MIN, LONG_MAX);
}
bool dfs(TreeNode* root, long min_val, long max_val)
{
if (root == nullptr) return true;
if (root->val <= min_val || root->val >= max_val) return false;
return dfs(root->left, min_val, root->val)
&& dfs(root->right, root->val, max_val);
}
};
前序遍历。
class Solution {
long prev = LONG_MIN;
public:
bool isValidBST(TreeNode* root) {
if (root == nullptr) return true;
if (isValidBST(root->left) == false) return false;
if (root->val <= prev) return false;
prev = root->val;
return isValidBST(root->right);
}
};
二叉搜索树中第 K 小的元素
- 二叉搜索树中第 K 小的元素
class Solution {
int res, cnt;
public:
int kthSmallest(TreeNode* root, int k) {
cnt = k;
dfs(root);
return res;
}
void dfs(TreeNode* root)
{
if (root == nullptr) return;
dfs(root->left);
if (--cnt == 0)
{
res = root->val;
return;
}
dfs(root->right);
}
};
二叉树的右视图
- 二叉树的右视图
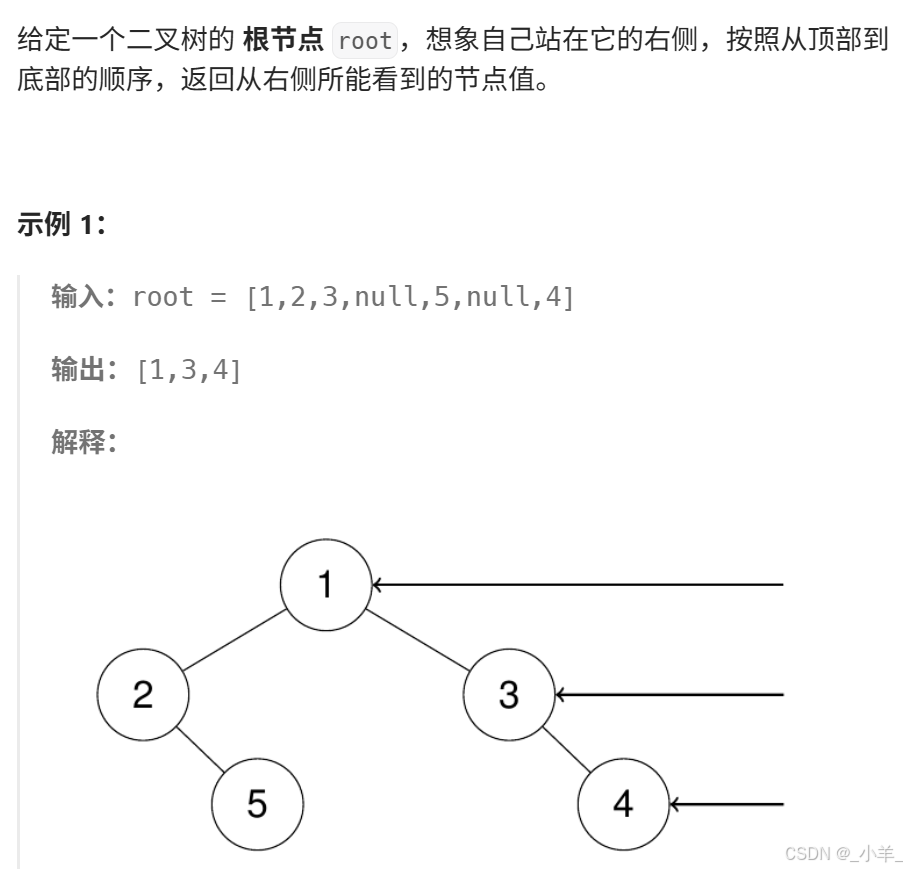
从右往左层序遍历,每次都只拿队头节点的值。
class Solution {
public:
vector<int> rightSideView(TreeNode* root) {
vector<int> res;
if (root == nullptr) return res;
queue<TreeNode*> q;
q.push(root);
while (q.size())
{
res.push_back(q.front()->val);
int sz = q.size();
while (sz--)
{
TreeNode* node = q.front();
q.pop();
if (node->right) q.push(node->right);
if (node->left) q.push(node->left);
}
}
return res;
}
};
二叉树展开为链表
- 二叉树展开为链表
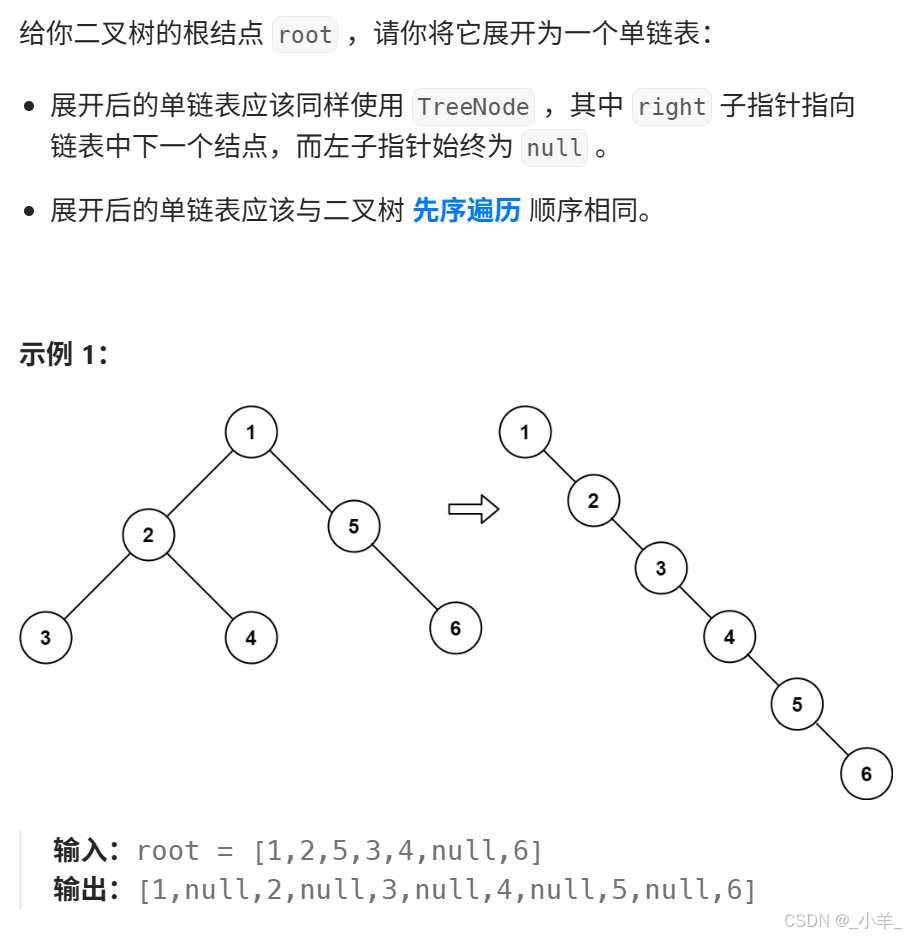
方法一:在前序遍历的过程中把节点存起来,结束后在处理每个节点的指向。
class Solution {
public:
void flatten(TreeNode* root) {
vector<TreeNode*> vt;
dfs(root, vt);
for (int i = 1; i < vt.size(); i++)
{
TreeNode* prev = vt[i - 1], *cur = vt[i];
prev->left = nullptr;
prev->right = cur;
}
}
void dfs(TreeNode* root, vector<TreeNode*>& vt)
{
if (root)
{
vt.push_back(root);
dfs(root->left, vt);
dfs(root->right, vt);
}
}
};
方法二:寻找前驱结点法。
在前序遍历的过程中,如果当前节点的左子树不为空,则遍历到当前节点的右子树的前一个节点为:当前节点左子树中最右的那个节点。我们在遍历的过程中找到这个前驱结点,将当前节点的右子树拼接到这个前驱节点的右节点上,然后将当前节点的左子树拼接到当前节点的右子树上,最后当前节点左子树置空。
class Solution {
public:
void flatten(TreeNode* root) {
TreeNode* cur = root;
while (cur)
{
if (cur->left)
{
auto prev = cur->left;
while (prev->right) prev = prev->right;
prev->right = cur->right;
cur->right = cur->left;
cur->left = nullptr;
}
cur = cur->right;
}
}
};
从前序与中序遍历序列构造二叉树
- 从前序与中序遍历序列构造二叉树
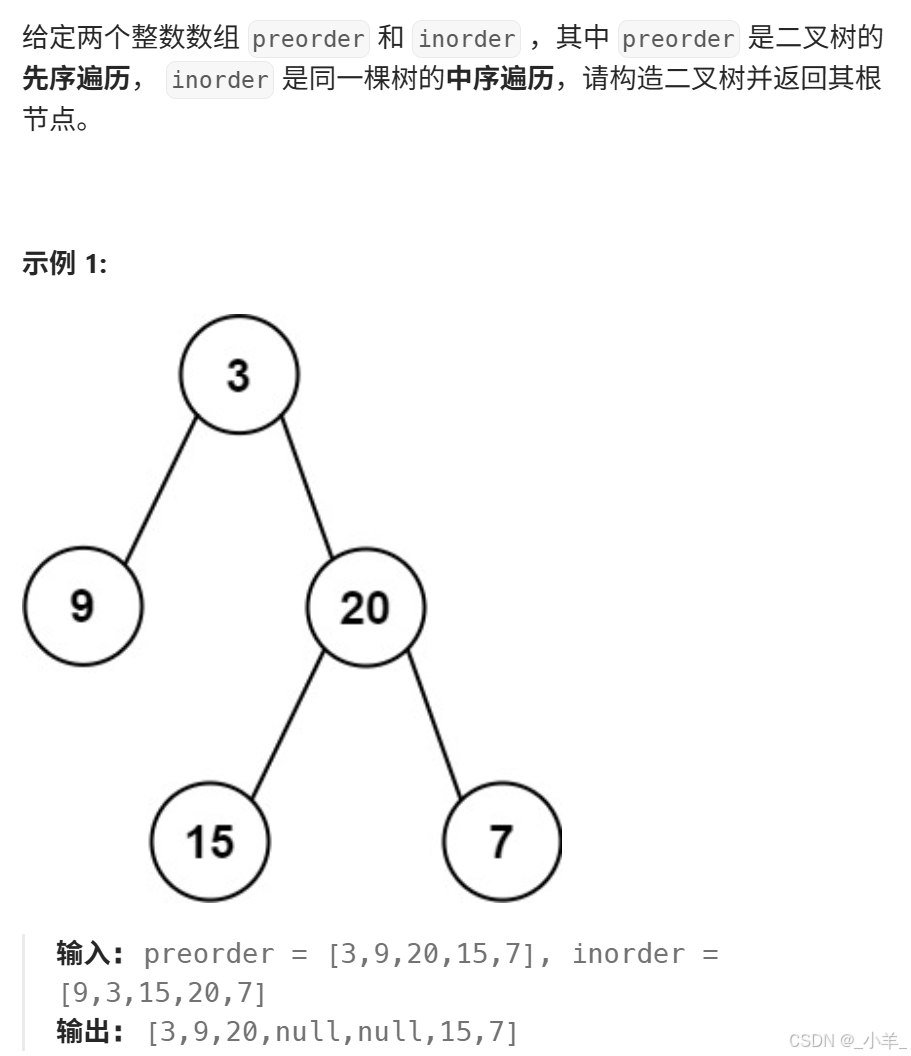
根据前序遍历依次找到根节点,通过找到的根节点找到中序遍历中根节点的位置,从而划分出 [左子树] [根节点] [右子树]。
用哈希表存储中序遍历的值和下标映射关系,以至于能在找到根节点后直接拿到根节点在中序遍历中的位置,然后根据中序遍历的位置递归构建左子树和右子树。
class Solution {
unordered_map<int, int> index;
public:
TreeNode* buildTree(vector<int>& preorder, vector<int>& inorder) {
for (int i = 0; i < inorder.size(); i++)
{
index[inorder[i]] = i;
}
return dfs(preorder, 0, 0, inorder.size() - 1);
}
TreeNode* dfs(vector<int>& preorder, int root, int l, int r)
{
if (l > r) return nullptr;
TreeNode* node = new TreeNode(preorder[root]);
int id = index[preorder[root]];
node->left = dfs(preorder, root + 1, l, id - 1);
node->right = dfs(preorder, root + id - l + 1, id + 1, r);
return node;
}
};
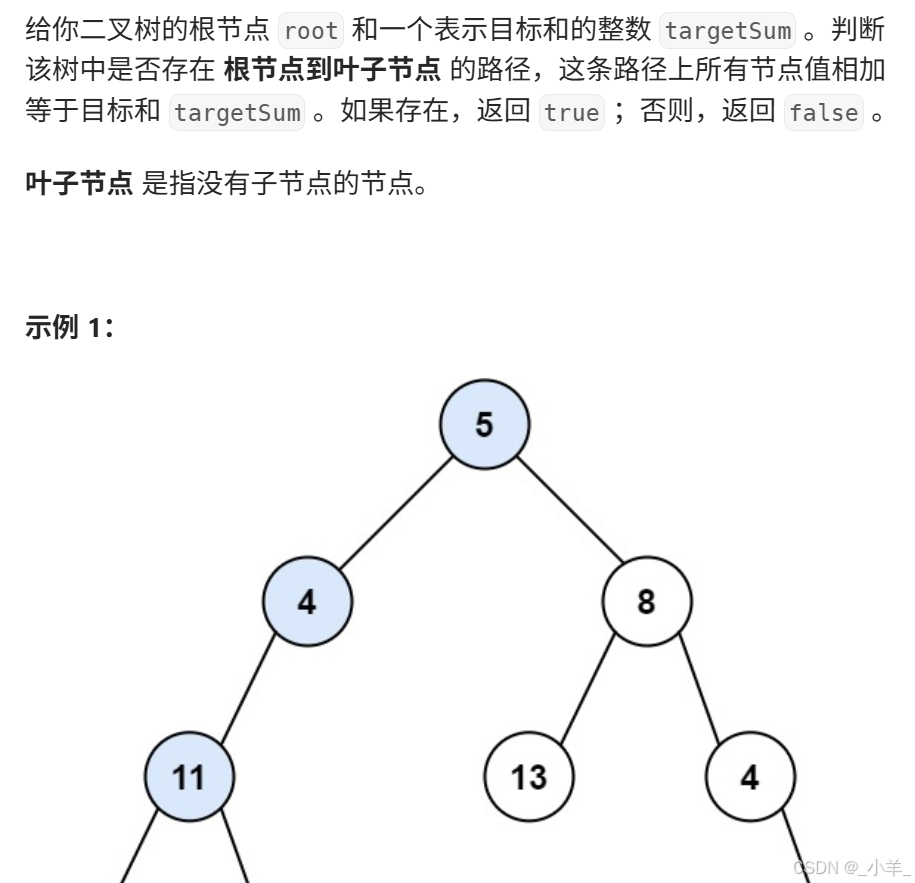
路径总和
- 路径总和
class Solution {
public:
bool hasPathSum(TreeNode* root, int targetSum) {
if (root == nullptr) return false;
if (root->left == nullptr && root->right == nullptr)
{
return targetSum == root->val;
}
return hasPathSum(root->left, targetSum - root->val)
|| hasPathSum(root->right, targetSum - root->val);
}
};
路径总和 II
- 路径总和 II
class Solution {
vector<vector<int>> res;
vector<int> path;
public:
vector<vector<int>> pathSum(TreeNode* root, int targetSum) {
dfs(root, targetSum);
return res;
}
void dfs(TreeNode* root, int t)
{
if (root == nullptr) return;
path.push_back(root->val);
if (root->left == nullptr && root->right == nullptr && t == root->val)
{
res.push_back(path);
}
dfs(root->left, t - root->val);
dfs(root->right, t - root->val);
path.pop_back(); // 回溯
}
};
路径总和 III
- 路径总和 III
class Solution {
using ll = long long;
unordered_map<ll, int> pre_cnt; // 记录前缀和及其出现次数
int t;
public:
int pathSum(TreeNode* root, int targetSum) {
t = targetSum;
pre_cnt[0] = 1; // 前缀和恰好等于目标值
return dfs(root, 0);
}
int dfs(TreeNode* root, ll sum) {
if (root == nullptr) return 0;
sum += root->val;
int count = pre_cnt[sum - t];
pre_cnt[sum]++;
count += dfs(root->left, sum);
count += dfs(root->right, sum);
pre_cnt[sum]--;
return count;
}
};
本篇文章的分享就到这里了,如果您觉得在本文有所收获,还请留下您的三连支持哦~