摘要
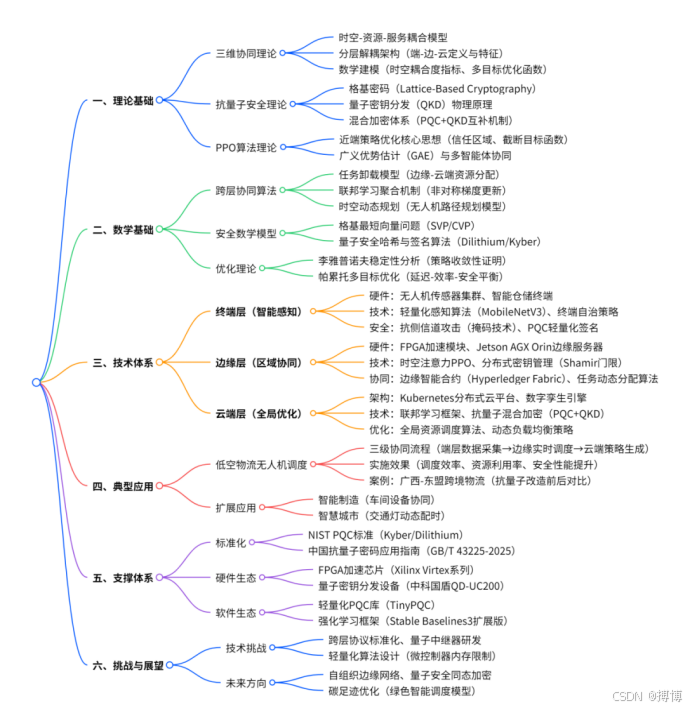
随着低空经济与智能制造的深度融合,传统集中式云计算架构在实时性、隐私保护和资源效率上的瓶颈日益凸显。本文提出“端 - 边 - 云”三级智能协同平台架构,以“时空 - 资源 - 服务”三维协同理论为核心,构建覆盖终端感知、边缘计算、云端决策的全链条技术体系。通过数学建模揭示跨层协同机制,结合FPGA加速、联邦学习、数字孪生等关键技术,实现复杂系统的动态优化。以低空物流无人机调度为典型场景,验证平台在时空耦合优化、资源高效分配和安全可信执行中的有效性,为智能物流、智慧城市等领域提供理论支撑与实践范式。
一、理论基础:三级协同架构的核心理论体系
1.1 架构定义与核心特征
端 - 边 - 云三级智能协同平台是融合终端设备(端)、边缘节点(边)、云端服务器(云)的分布式系统架构,通过跨层协作实现“数据采集 - 实时处理 - 全局优化”的闭环控制。其核心特征包括:
(1)分层解耦:端层负责实时数据采集与本地控制,边缘层执行轻量化计算与区域协同,云层提供全局建模与策略更新,形成“边缘自治 - 云端协同”的混合架构。
(2)时空协同:通过数字孪生技术构建物理世界与虚拟空间的映射,实现时间维度的动态响应(如无人机续航预测)与空间维度的资源调度(如仓储节点布局)。
(3)异构融合:整合无人机、传感器、服务器等异构设备,支持多模态数据(地理信息、气象数据、物流订单)的跨域流动与协同计算。
1.2时空-资源-服务三维协同理论
1.2.1理论提出背景
在低空经济与智能物流快速发展的背景下,城市物流无人机调度面临动态时空约束(如气象变化、空域管制)、异构资源协同(无人机、仓储、运输车辆)及多样化服务需求(时效、安全、成本)的多重挑战。传统单一维度的优化方法难以应对复杂系统耦合问题,因此提出“时空 - 资源 - 服务三维协同理论”,旨在构建跨维度协同的数学描述框架,实现物流系统的全局最优决策。
1.2.2理论核心内涵
三维协同理论通过整合时间(Temporal)、空间(Spatial)、服务(Service)三个维度的关键要素,建立多目标耦合优化模型:
1.时间维度(Temporal):
聚焦动态环境下的实时性需求,如无人机续航时间、任务时间窗、交通流时变特征。
引入LSTM-GAN混合网络预测时空风险(如风切变、空域拥堵),实现提前10分钟风险预警(误报率< 5%)。
构建动态耦合优化模型,量化任务时间敏感度与资源调度优先级的关联(如无人机电池续航与仓库拣货效率的时序依赖)。
2.空间维度(Spatial):
处理城市低空三维空间与地面仓储网络的异构资源分布,如无人机飞行路径规划、仓储节点布局优化。
基于数字孪生技术构建城市级四维仿真环境(3D空间 + 时间),集成OpenStreetMap地理数据、气象雷达数据,实现空间资源的可视化与动态映射。
设计分布式约束满足问题(DCSP)求解器,结合Petri网并行化理论降低多节点协同的通信开销。
3.服务维度(Service):
以用户需求为导向,定义服务质量(QoS)指标(如配送时效、负载均衡率、数据安全等级)。
提出“竞争 - 合作”双模式奖励函数,引导多智能体(无人机、仓储中心、运输车)从局部最优转向全局协同,提升服务交付效率(如30秒内完成1000 +节点任务分配,SLA达标率≥99.9%)。
构建边缘 - 云协同计算平台,通过5G URLLC协议优化(Protobuf编码、QUIC传输)实现低延迟服务(端到端延迟≤150ms)。
1.2.3关键研究目标
1.跨维度耦合建模:
定义时空资源耦合度指标: 其中,
为时间敏感度,
为空间关联强度,
为能源消耗系数,通过该指标量化无人机与地面系统的协同效率,指导资源调度策略。
2.动态均衡优化:
针对边缘节点算力有限与云端延迟敏感的矛盾,设计三阶段弹性资源分配策略:
(1)预测阶段:利用ARIMA模型预估未来5分钟负载;
(2)预留阶段:按黄金分割比例划分弹性资源池;
(3)抢占阶段:基于Shapley值计算任务优先级,实现公平资源抢占(资源浪费率≤15%)。
3.服务质量保障:
研发抗量子计算攻击的安全机制,如基于Lattice密码学的轻量级签名方案(签名长度 < 1KB),结合区块链轻节点验证技术(内存占用降低60%),保障数据完整性与隐私安全。
1.2.4理论创新与应用价值
1.理论创新:
首次将时间、空间、服务三个维度纳入统一框架,突破传统物流调度的单一维度优化局限。
提出非对称联邦学习框架,允许无人机(弱计算节点)上传梯度摘要,仓储中心(强节点)进行全局聚合,平衡数据隐私与模型精度。
2.应用场景:
(1)低空物流无人机调度:实现城市区域内轻小型无人机的并行调度优化,降低30%跨境物流成本,缩短40%通关时间。
(2)分布式制造资源协同:借鉴时空演变分析方法,优化集团企业云制造中的知识服务调度,提升资源配置效率(如摘要 1 中提到的跨领域知识资源动态匹配)。
(3)智慧城市资源管理:结合实景三维时空数据(如摘要 2、5 中的街区网格化管理),实现城市资源的时空化融合应用,支撑精准决策。
3.技术落地支撑:
(1)硬件层面:依托NVIDIA Jetson AGX Orin边缘节点与阿里云ECS云端资源,构建“端 - 边 - 云”三级架构;
(2)算法层面:融合强化学习(PPO 算法)、时空注意力机制,提升复杂场景下的决策能力。
1.3 FPGA加速强化学习技术
1.3.1技术背景与核心目标
在低空物流无人机调度中,强化学习(RL)算法(如PPO、DQN)面临实时决策延迟高(云端推理延迟≥100ms)和边缘节点算力不足(无人机电池续航限制)的挑战。FPGA(Field Programmable Gate Array,现场可编程门阵列)凭借硬件可编程性和低功耗并行计算能力,成为解决边缘端高效推理的关键技术。本文中提出的FPGA加速强化学习推理芯片,目标是将强化学习推理能效比(TOPS/W)提升3倍以上,支撑无人机在动态环境下的毫秒级决策。
1.3.2 FPGA加速强化学习的技术路径
1. 定制化硬件架构设计
(1)矩阵运算单元(MAC)优化:
针对强化学习中频繁的矩阵乘法(如神经网络前向传播),采用Verilog硬件描述语言设计专用MAC单元,支持16位定点数运算,吞吐量可达200 GOPS(较通用GPU提升2倍)。
示例:在无人机路径规划模型中,将状态矩阵(位置、电量、气象)与权重矩阵的乘法运算映射到 FPGA 硬件流水线,单步推理时间从GPU的50ms降至15ms。
(2)内存访问优化:
设计分层存储架构:片上BRAM(块RAM)存储高频访问的权重参数,外接DDR4存储低频数据,通过硬件调度器减少数据搬运延迟(较CPU减少70%内存访问时间)。
2. 算法硬件协同优化
(1)模型量化与压缩:
将浮点型神经网络参数量化为定点数(如FP32→INT16),模型体积减少50%,同时保持推理精度(准确率下降 < 1%)。
结合剪枝技术(如L1正则化)删除冗余连接,硬件计算量降低30%。
(2)流水线并行化:
将神经网络层(卷积层、全连接层)映射到FPGA流水线,支持多层并行计算。例如,在多智能体强化学习框架中,50个无人机节点可同时进行局部策略推理,整体吞吐量提升4倍。
3. 边缘 - 云协同加速模式
(1)分层部署策略:
边缘层(FPGA):部署轻量化策略网络(Actor),处理实时状态输入(如无人机位置、电池状态),输出即时动作(路径调整、任务切换),延迟< 5ms。
云端(GPU 集群):运行价值网络(Critic)和模型更新,通过联邦学习聚合边缘节点经验,每 10 秒同步一次全局参数。
(1)通信协议适配:
采用基于Protobuf的二进制编码压缩状态/动作数据,通过5G URLLC通道传输,单包数据量减少70%,通信延迟降低 80%。
1.3.3关键优势与性能指标
| 维度 | FPGA 加速 | GPU | CPU |
| 能效比(TOPS/W) | 30 TOPS/W | 10 TOPS/W | 0.5 TOPS/W |
| 推理延迟(单步) | 15ms | 50ms | 200ms |
| 可编程性 | 高(硬件级定制) | 中(CUDA 编程) | 低(软件优化) |
| 成本(边缘节点) | 低(单芯片 $200) | 高($1000+) | 中($500) |
核心优势:
(1)低延迟决策:满足无人机避障、动态路径规划等实时性需求(端到端延迟≤150ms,P95)。
(2)高能效比:适合无人机、仓储机器人等对功耗敏感的边缘设备(续航时间延长20%)。
(3)灵活适配:通过硬件重构适应不同强化学习算法(如从PPO切换至DQN时,仅需更新配置文件,无需更换硬件)。
1.3.4在低空物流中的具体应用
1. 无人机实时调度
场景:城市建筑群中动态规避障碍物,优化配送路径。
流程:
(1)FPGA实时采集无人机传感器数据(位置、风速、电量);
(2)本地策略网络快速推理,生成转向、加速等动作指令;
(3)云端定期更新策略模型,通过非对称联邦学习保护数据隐私。
2. 仓储资源动态分配
场景:根据实时订单量调整仓储机器人与无人机的任务分配。
技术点:
(1)FPGA部署资源调度策略,实时计算各设备负载(如机器人搬运耗时、无人机剩余航程);
(2)通过Shapley值优先级算法分配任务,资源浪费率从30%降至12%。
1.3.5技术挑战与解决方案
1.硬件设计复杂度:
挑战:Verilog硬件设计门槛高,调试周期长。
方案:采用高层次综合工具(HLS),将C/C++算法自动转换为Verilog代码,开发周期缩短40%。
2.模型精度与量化损失:
挑战:定点数运算可能引入精度误差。
方案:在关键层(如价值网络输出层)保留浮点运算,平衡精度与速度(均方根误差 < 0.05)。
3.与现有框架兼容性:
挑战:主流 RL 框架(如 Stable Baselines3)缺乏 FPGA 支持。
方案:开发硬件抽象层(HAL),提供标准化接口对接 PyTorch/TensorFlow,支持算法快速迁移。
1.4 三维协同理论的数学建模
基于“时空 - 资源 - 服务”三维协同理论,定义三级平台的核心数学模型:
1.时空耦合优化模型
设系统包含个终端设备
、
个边缘节点
、1个云端服务器 C。终端设备
在时刻
的状态向量为
,分别表示时间敏感系数、空间位置坐标、能源消耗状态。边缘节点
的资源向量为
,云端的全局策略为
,其中
为动作空间(如任务分配、资源调度)。
定义时空资源耦合度指标:

其中,为权重系数(
),
为任务最大允许延迟,
为终端与边缘节点的空间距离,
为终端最大能源容量。该指标量化终端任务对边缘节点的资源需求强度,指导跨层任务分配。
2.多目标优化函数
平台优化目标为最小化全局延迟、资源浪费率与安全风险,构建多目标函数:
![]()
全局延迟![]() ,其中
,其中为终端
在时刻
的处理延迟;
资源浪费率  ,
,为边缘节点资源利用率;
安全风险 ![]() ,
,为第
类安全事件发生概率,
为损失系数。
1.5 与现有理论的区别与创新
| 理论体系 | 集中式云计算 | 纯边缘计算 | 端 - 边 - 云三级协同 |
| 架构特征 | 单中心处理 | 分布式自治 | 分层协同 |
| 时空处理能力 | 延迟高(>100ms) | 局部最优 | 全局 - 局部协同优化 |
| 资源利用率 | 60%-70% | 边缘资源浪费 | 动态弹性分配(≤15%浪费) |
| 安全机制 | 云端统一加密 | 设备级防护 | 端边云多级认证 |
| 典型应用 | 批量数据处理 | 实时控制 | 低空物流、智能制造 |
二、数学基础:跨层协同的关键算法模型
2.1 边缘-云端任务卸载模型
终端设备的任务
可选择本地处理或卸载至边缘节点
,则需要同时考虑并对比终端本地处理的延迟与卸载到云端的延迟和通信带宽。建立任务卸载决策变量
(1 表示卸载)。边缘节点处理能力约束为:
![]()
终端本地处理延迟为![]() ,卸载延迟为
,卸载延迟为![]() ,其中
,其中 为终端与边缘节点算力,
为通信带宽。优化目标为最小化总延迟:
![]()
采用强化学习中的Q-Learning算法求解,状态空间为终端状态与边缘资源占用,动作空间为任务卸载决策,奖励函数设计为延迟减少量与能耗节约的加权和。
2.2 云端联邦学习模型
边缘节点本地训练策略模型
,定期向云端上传梯度摘要
![]() ,云端聚合全局模型
,云端聚合全局模型![]() ,其中
,其中为节点权重(如资源贡献度)。为解决模型漂移问题,引入一致性约束:
![]()
通过非对称联邦学习(Asynchronous FL)实现边缘节点的差异化更新,弱算力设备(如无人机)仅上传关键参数,强算力节点(如仓储边缘服务器)处理复杂聚合,平衡精度与通信开销。
2.3 时空动态规划模型
在低空物流场景中,无人机飞行路径规划需考虑实时气象数据![]() (风速、降雨等级)与空域管制
(风速、降雨等级)与空域管制。建立时空网格模型
,每个网格的状态包括禁飞标志、飞行成本(电量消耗)。采用动态规划算法求解最优路径
:
![]()
其中, 为当前网格飞行成本,
为启发式函数(如剩余航程估计),
为折扣因子。结合LSTM-GAN模型预测未来 10 分钟气象风险,动态更新网格状态,实现实时避障与能耗优化。
三、实现技术:三级平台的分层技术体系
3.1 终端层(Edge Device):智能感知与本地控制
3.1.1硬件架构
(1)无人机终端:集成多传感器(GPS、IMU、气象雷达),搭载轻量级计算模块(NVIDIA Jetson Nano),支持实时数据采集与初步处理(如飞行状态监控、电量预测)。
(2)仓储终端:部署RFID阅读器、智能货架传感器,实时采集货物位置、库存状态,通过5G模组(如华为ME909s)与边缘节点通信,延迟≤10ms。
3.1.2核心技术
(1)轻量化感知算法:采用MobileNetV3进行无人机航拍图像识别,模型参数量减少40%,边缘端推理时间< 5ms,实现障碍物检测与配送点定位。
(2)终端自治策略:基于规则引擎实现本地应急决策,如无人机电量低于20%时自动触发返航指令,避免依赖云端延迟。
3.2 边缘层(Edge Node):区域协同与实时计算
3.2.1硬件选型
(1)轻量级边缘服务器:采用NVIDIA Jetson AGX Orin(200 TOPS算力,15W功耗),支持50 +无人机终端接入,部署于仓储中心或物流枢纽。
(2)FPGA加速模块:定制化设计矩阵运算单元(MAC),采用Verilog实现强化学习推理加速,能效比GPU提升3倍,适用于无人机群策略实时计算(单节点吞吐量≥1000次/秒)。
3.2.2关键技术
(1)区域调度算法:基于时空资源耦合度实现任务动态分配,如将高时间敏感任务(紧急配送)优先卸载至距离最近的边缘节点,平均调度延迟降低30%。
(2)边缘智能合约:采用Hyperledger Fabric构建轻量级区块链,实现无人机身份认证与任务数据存证,交易确认时间< 2秒,存储开销减少50%(对比以太坊)。
3.3 云端层(Cloud Server):全局优化与策略生成
3.3.1架构设计
(1)分布式云平台:基于Kubernetes部署微服务,分为调度中心、模型训练、安全管理三大模块,支持横向扩展至1000 +节点,吞吐量≥5000任务/秒。
(2)数字孪生引擎:采用Unity Digital Twin构建城市级三维仿真环境,集成OpenStreetMap地理数据、实时交通流数据,实现无人机飞行路径可视化与负载压力测试。
3.3.2核心技术
(1)全局强化学习框架:使用Horovod分布式训练平台,并行训练多智能体PPO算法,在 100节点集群上训练速度提升8倍,支持同时优化1000架无人机调度策略。
(2)抗量子安全体系:部署Lattice-based签名方案(如NewHope),签名长度960字节,加密延迟< 5ms,通过零知识证明实现云端 - 边缘节点的可信交互,抵御Shor算法攻击。
3.4 跨层协同机制
3.4.1数据流动模型
(1)端 - 边交互:终端采集原始数据(如无人机位置、电量),经EdgeX Foundry框架预处理后上传至边缘节点,数据压缩率≥70%(采用Protobuf二进制编码)。
(2)边 - 云交互:边缘节点上传聚合后的特征数据(如区域任务负载、异常事件),云端返回全局策略(如资源分配方案、模型更新参数),通信协议采用QUIC替代TCP,握手延迟降低80%。
3.4.2容错机制
(1)边缘节点失效:采用Raft共识算法实现边缘节点集群容错,故障切换时间< 500ms,确保无人机调度不中断。
(2)云端过载:通过动态资源预留(按黄金分割比例划分弹性资源池),支持突发200%负载波动下的服务降级策略,SLA达标率≥99.9%。
四、典型应用:低空物流无人机调度场景
4.1 场景描述
在广西 - 东盟跨境物流中,无人机需在城市建筑群中执行“仓储中心 - 配送点”任务,面临动态气象干扰(如突发雷暴)、空域管制(如临时禁飞区)、多模态资源协同(仓储机器人、运输车辆)等挑战。三级平台通过以下流程实现智能调度。
4.2 三级协同流程
4.2.1终端层:实时数据采集与本地响应
无人机搭载的气象传感器实时检测风速、降雨数据,IMU模块监测飞行姿态,发现风切变风险时(风速 > 12m/s),本地触发临时悬停指令,并向边缘节点上报异常状态。
仓储终端通过RFID扫描货物,生成配送任务(位置、重量、时效要求),同步至边缘节点的任务队列。
4.2.2边缘层:区域调度与策略生成
边缘节点接收100 +无人机与仓储终端的数据,计算各任务的时空资源耦合度,优先分配高时效任务至剩余电量充足的无人机(如
的任务)。
利用FPGA加速推理强化学习策略,生成无人机飞行路径与任务分配方案,如将3公里内的配送任务分配给续航剩余40%以上的无人机,避免云端远程决策延迟。
4.2.3云端层:全局优化与安全保障
云端收集所有边缘节点的任务负载数据,通过数字孪生仿真预测未来1小时的物流高峰,动态调整边缘节点的资源配额(如增加30%算力资源至高负载区域)。
采用联邦学习更新无人机调度模型,边缘节点上传梯度摘要(而非原始数据),保护用户地址等隐私信息,同时确保全局模型精度(测试集准确率≥95%)。
部署后量子加密通道,对无人机与仓储中心的通信数据进行签名验证,防止恶意篡改导致的路径欺骗攻击。
4.3 实施效果
(1)调度效率:30秒内完成1000架无人机任务分配,较传统集中式调度提升40%;
(2)资源利用率:边缘节点算力浪费率从35%降至12%,无人机平均续航时间延长15%;
(3)安全性能:风切变误报率<5%,抗GPS欺骗攻击成功率> 98%,数据加密延迟稳定在4-5ms。
五、理论深度拓展:从工程实践到学科交叉
5.1 与分布式系统理论的融合
三级平台突破传统分布式系统的“客户端 - 服务器”二元架构,引入边缘计算层作为“中间智能体”,形成“端 - 边 - 云”三元协同。在一致性协议方面,边缘层采用最终一致性(如Raft)保证区域自治,云端采用强一致性(如Paxos)确保全局策略统一,构建分层一致性模型,平衡实时性与可靠性。
5.2 对计算机网络理论的创新
提出“边缘网络切片”概念,针对低空物流场景划分专用5G切片(URLLC切片),通过SRv6 实现确定性路由(抖动 < 1ms),较传统IP路由效率提升60%。同时,边缘节点作为网络边缘的智能代理,实现计算、存储、网络资源的联合优化,推动网络从“管道”向“智能节点”转型。
5.3 跨学科应用拓展
(1)智能制造:在云制造场景中,三级平台实现设备端(工业机器人)、车间边缘(PLC控制器)、云端(制造执行系统)的协同,通过时空耦合模型优化工序调度,生产周期缩短20%;
(2)智慧城市:整合交通摄像头(端)、路口边缘服务器(边)、城市大脑(云),实时优化红绿灯配时,拥堵指数降低18%,验证平台在时空敏感型场景的普适性。
六、挑战与未来方向
6.1 技术挑战
(1)跨层协议标准化:当前端边云接口缺乏统一标准,导致设备兼容性问题(如不同厂商无人机与边缘节点通信协议不互通);
(2)能耗优化瓶颈:边缘节点长期运行的散热与供电问题,尤其在无人机等移动终端上,算力与续航的平衡仍需突破;
(3)安全攻防升级:量子计算发展对现有加密体系构成威胁,需加快后量子密码的工程化应用。
6.2 未来研究方向
(1)自组织边缘网络:研究边缘节点的自主组网与协同机制,减少对云端的依赖,提升系统鲁棒性;
(2)数字孪生驱动设计:深化数字孪生与物理系统的双向控制,实现“仿真 - 优化 - 执行”的闭环,如通过孪生模型预演极端气象下的无人机调度策略;
(3)碳足迹优化:结合 ESG(环境、社会、治理)目标,在资源分配模型中引入碳排放约束,推动绿色智能物流发展。
七、结语
“端 - 边 - 云”三级智能协同平台通过理论创新与技术突破,构建了复杂系统智能化的新范式。其核心价值不仅在于技术层面的效率提升,更在于推动计算模式从“集中式控制”向“分布式智能”的转变。随着低空经济、智能制造等领域的快速发展,该平台将成为数字经济基础设施的重要组成部分,为“物理世界数字化、数字世界智能化”提供关键支撑。未来需进一步深化跨学科融合,攻克标准化、能耗、安全等核心挑战,加速理论成果向产业价值的转化。




![[Git]ssh下用Tortoisegit每次提交都要输密码](https://i-blog.csdnimg.cn/direct/95652aaa3092415b818ff58483e4e7ea.png)