《MATLAB实战训练营:从入门到工业级应用》高阶挑战篇-5G通信速成:MATLAB毫米波信道建模仿真指南 🚀📡
大家好!今天我将带大家进入5G通信的奇妙世界,我们一起探索5G通信中最激动人心的部分之一——毫米波信道建模!本文将从基础概念讲起,带你一步步用MATLAB2016b实现完整的毫米波信道仿真。准备好你的MATLAB,让我们开始这段技术之旅吧!🚀
1. 为什么选择毫米波?🌊
1.1 为什么毫米波如此重要?
毫米波(30-300GHz)是5G通信的关键技术之一,它能提供超大带宽(想想Gb/s的速率!),超低延迟,是未来VR/AR、自动驾驶等应用的基石。
有趣的事实:毫米波之所以叫"毫米"波,是因为它的波长在1-10毫米之间,比传统微波(厘米级)短得多!📏
1.2 毫米波信道的特点
5G网络之所以能提供超高速率和超低时延,很大程度上得益于毫米波(mmWave)技术的应用。毫米波通常指30GHz至300GHz频段的电磁波,具有以下特点:
- 超大带宽:可提供高达2GHz的连续带宽
- 超高速率:理论速率可达10Gbps以上
- 极小时延:空口时延可低至1ms
- 小型天线:毫米波波长短,天线尺寸小
不过,毫米波也面临一些挑战:
- 传播损耗大:氧气吸收、雨衰等影响显著,特定频段(如60GHz)受氧气吸收影响
- 穿透能力差:信号衰减快,容易被建筑物、人体等阻挡
- 覆盖范围小:需要密集部署小基站
- 方向性传输:不同于传统信道的丰富散射,需要波束成形
2. 毫米波信道建模基础 📚
在开始编码前,我们需要了解一些基本概念:
2.1 信道冲激响应 (Channel Impulse Response)
毫米波信道可以表示为:
h
(
t
,
τ
)
=
∑
α
n
(
t
)
δ
(
τ
−
τ
n
(
t
)
)
h(t,\tau) = \sum \alpha_n(t) \delta(\tau - \tau_n(t))
h(t,τ)=∑αn(t)δ(τ−τn(t))
其中αₙ是第n条路径的复增益,τₙ是时延。
2.2 毫米波信道特性
- 空间选择性:由于使用大规模MIMO,信道具有明显的空间特性
- 时间选择性:用户移动导致信道时变
- 频率选择性:宽带信号在不同频段经历不同衰落
2.3 常用的信道模型
- 3GPP TR 38.901模型:标准化模型,适合系统级仿真
- NYUSIM模型:纽约大学开发的基于测量的模型
- 射线追踪模型:基于几何光学原理,精度高但计算复杂
3. MATLAB实现步骤 🛠️
现在让我们动手实现一个简化的毫米波信道模型!我们将基于3GPP TR 38.901的室内办公室(Indoor Office)场景。
3.1 环境设置
首先,我们需要设置仿真参数:
clear all; close all; clc;
% 基本参数设置
fc = 28e9; % 载波频率28GHz
BW = 100e6; % 系统带宽100MHz
Ts = 1/BW; % 采样间隔
c = 3e8; % 光速
lambda = c/fc; % 波长
% 天线配置
Nt = 8; % 发射天线数
Nr = 8; % 接收天线数
antennaSpacing = lambda/2; % 天线间距
% 场景参数
roomSize = [20, 20, 3]; % 房间尺寸(长,宽,高)m
txPos = [2, 2, 1.5]; % 发射机位置
rxPos = [18, 18, 1.5]; % 接收机位置
3.2 生成信道系数
接下来,我们实现一个简化的空间信道模型:
function [h, tau, AoD, AoA] = generateMmWaveChannel(Nt, Nr, fc, txPos, rxPos, roomSize)
% 生成毫米波信道系数
% 输入:
% Nt - 发射天线数
% Nr - 接收天线数
% fc - 载波频率(Hz)
% txPos - 发射机位置[x,y,z]
% rxPos - 接收机位置[x,y,z]
% roomSize - 房间尺寸[x,y,z]
% 输出:
% h - 信道冲激响应
% tau - 路径时延
% AoD - 离开角(方位角,仰角)
% AoA - 到达角(方位角,仰角)
c = 3e8; % 光速
lambda = c/fc; % 波长
% 1. 计算直射路径(LOS)
d_los = norm(txPos - rxPos);
tau_los = d_los / c;
% 2. 生成反射路径(NLOS) - 这里简化为4条反射路径
numReflections = 4;
tau_nlos = zeros(1, numReflections);
for i = 1:numReflections
% 简化的反射路径计算
reflectPoint = roomSize .* rand(1,3); % 随机反射点
d_nlos = norm(txPos - reflectPoint) + norm(reflectPoint - rxPos);
tau_nlos(i) = d_nlos / c;
end
% 合并所有路径时延
tau = [tau_los, tau_nlos];
[tau, idx] = sort(tau); % 按时延排序
% 3. 生成路径增益(简化模型)
PL_los = freeSpacePathLoss(fc, d_los); % 自由空间路径损耗
alpha_los = (randn(1) + 1i*randn(1)) / sqrt(2) * 10^(-PL_los/20);
alpha_nlos = zeros(1, numReflections);
for i = 1:numReflections
d = tau_nlos(i) * c;
PL_nlos = freeSpacePathLoss(fc, d) + 10; % NLOS比LOS多10dB损耗
alpha_nlos(i) = (randn(1) + 1i*randn(1)) / sqrt(2) * 10^(-PL_nlos/20);
end
alpha = [alpha_los, alpha_nlos];
alpha = alpha(idx); % 按时延排序增益
% 4. 生成角度信息(简化)
AoD = zeros(2, length(tau)); % 每列是一个路径的[方位角;仰角]
AoA = zeros(2, length(tau));
% LOS路径角度
[az_los, el_los] = computeAngles(txPos, rxPos);
AoD(:,1) = [az_los; el_los];
AoA(:,1) = [-az_los; -el_los];
% NLOS路径角度
for i = 2:length(tau)
AoD(:,i) = [rand()*2*pi-pi; rand()*pi-pi/2]; % 随机角度
AoA(:,i) = [rand()*2*pi-pi; rand()*pi-pi/2];
end
% 5. 构建MIMO信道矩阵
h = zeros(Nr, Nt, length(tau));
for p = 1:length(tau)
% 发射端阵列响应向量
a_t = getArrayResponse(AoD(:,p), Nt, lambda);
% 接收端阵列响应向量
a_r = getArrayResponse(AoA(:,p), Nr, lambda);
h(:,:,p) = alpha(p) * (a_r * a_t');
end
end
function PL = freeSpacePathLoss(fc, d)
% 自由空间路径损耗计算
lambda = 3e8/fc;
PL = 20*log10(4*pi*d/lambda);
end
function [az, el] = computeAngles(txPos, rxPos)
% 计算从tx到rx的方位角和仰角
vec = rxPos - txPos;
az = atan2(vec(2), vec(1));
el = atan2(vec(3), sqrt(vec(1)^2 + vec(2)^2));
end
function a = getArrayResponse(angle, N, lambda)
% 生成阵列响应向量
% angle: [方位角; 仰角]
% N: 天线数
% lambda: 波长
az = angle(1); % 方位角
el = angle(2); % 仰角
d = lambda/2; % 天线间距
positions = (0:N-1)*d;
% 阵列响应向量
a = exp(-1i*2*pi*positions'*sin(az)*cos(el)/lambda);
a = a / sqrt(N); % 归一化
end
3.3 信道可视化
现在让我们可视化生成的信道:
% 生成信道
[h, tau, AoD, AoA] = generateMmWaveChannel(Nt, Nr, fc, txPos, rxPos, roomSize);
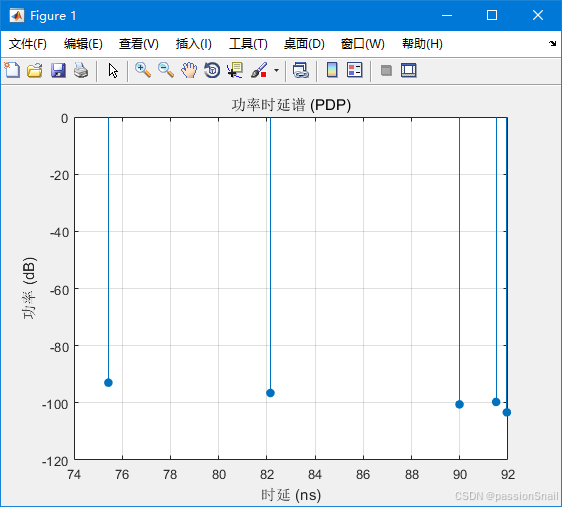
% 绘制功率时延谱
figure;
powers = squeeze(sum(sum(abs(h).^2, 1), 2));
stem(tau*1e9, 10*log10(powers), 'filled');
xlabel('时延 (ns)');
ylabel('功率 (dB)');
title('功率时延谱 (PDP)');
grid on;
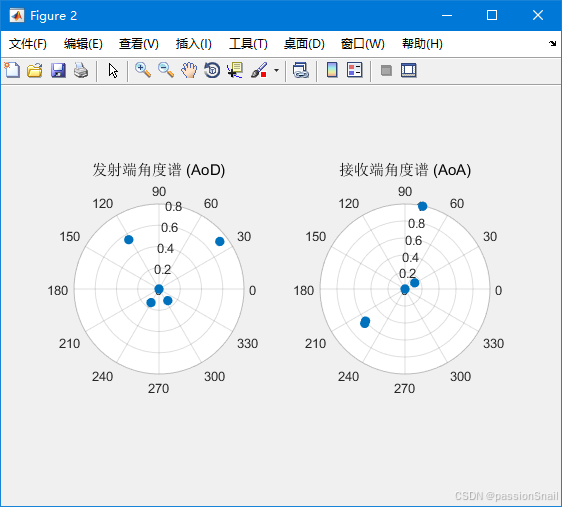
% 绘制角度谱
figure;
subplot(1,2,1);
polarscatter(AoD(1,:), AoD(2,:), 50, 'filled');
title('发射端角度谱 (AoD)');
subplot(1,2,2);
polarscatter(AoA(1,:), AoA(2,:), 50, 'filled');
title('接收端角度谱 (AoA)');
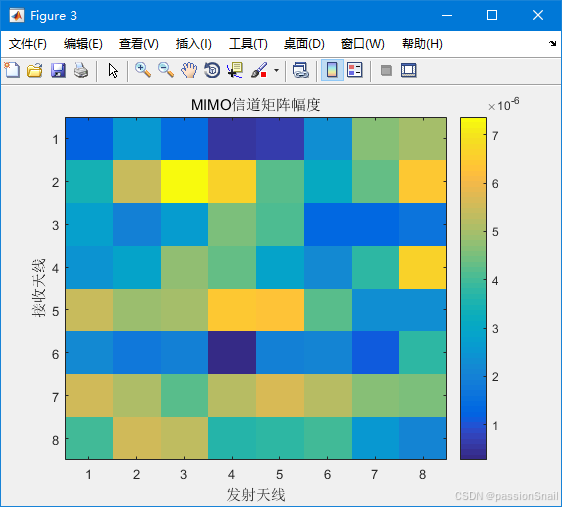
% 绘制信道矩阵幅度
figure;
H = sum(h, 3); % 对所有路径求和
imagesc(abs(H));
colorbar;
xlabel('发射天线');
ylabel('接收天线');
title('MIMO信道矩阵幅度');
4. 完整仿真示例 📊
让我们把这些整合成一个完整的仿真示例,包括移动性建模和信道时变性:
% 5G毫米波信道建模完整示例 - MATLAB 2016b兼容版本
clear all; close all; clc;
%% 1. 参数设置
fc = 28e9; % 载波频率28GHz
BW = 100e6; % 系统带宽100MHz
Ts = 1/BW; % 采样间隔
c = 3e8; % 光速
lambda = c/fc; % 波长
% 天线配置
Nt = 8; % 发射天线数
Nr = 8; % 接收天线数
antennaSpacing = lambda/2; % 天线间距
% 场景参数
roomSize = [20, 20, 3]; % 房间尺寸(长,宽,高)m
txPos = [2, 2, 1.5]; % 发射机位置
rxSpeed = 1; % 接收机移动速度 m/s
rxDirection = [1, 1, 0]; % 接收机移动方向
rxDirection = rxDirection/norm(rxDirection); % 归一化
% 仿真参数
numSnapshots = 100; % 快拍数
snapshotInterval = 0.01; % 快拍间隔(s)
%% 2. 信道仿真循环
H = zeros(Nr, Nt, numSnapshots); % 存储每个时刻的信道矩阵
rxPositions = zeros(3, numSnapshots); % 存储接收机位置
rxPos = 0;
for t = 1:numSnapshots
% 更新接收机位置
rxPos = rxPos + rxSpeed * rxDirection * snapshotInterval;
rxPositions(:,t) = rxPos;
% 确保接收机在房间内
rxPos = max([0.5, 0.5, 1], min(roomSize-[0.5,0.5,1], rxPos));
% 生成信道
[h, tau, AoD, AoA] = generateMmWaveChannel(Nt, Nr, fc, txPos, rxPos, roomSize);
% 存储信道矩阵(对所有路径求和)
H(:,:,t) = sum(h, 3);
end
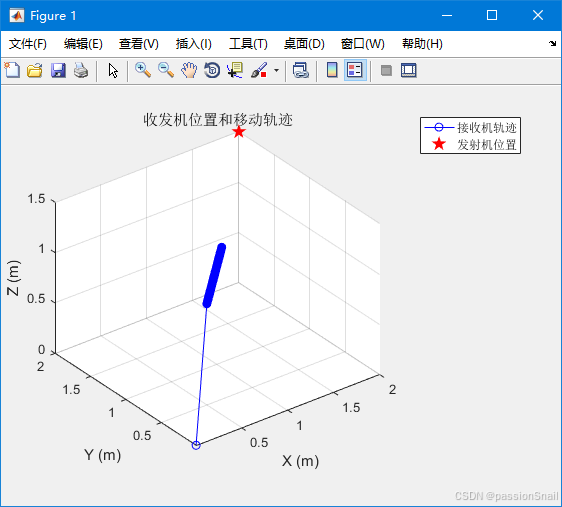
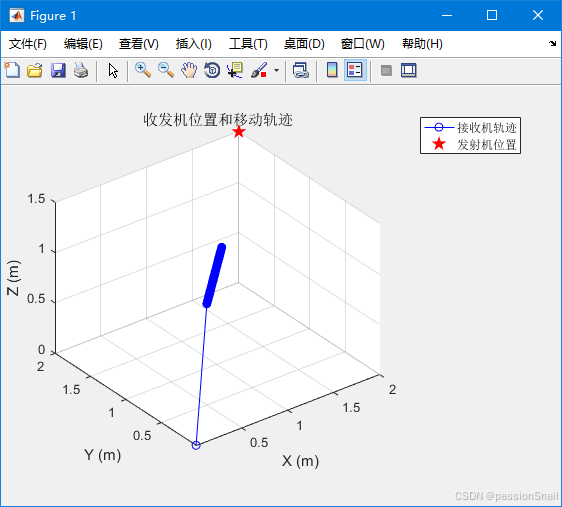
%% 3. 结果可视化
% 3.1 接收机轨迹
figure;
plot3(rxPositions(1,:), rxPositions(2,:), rxPositions(3,:), 'b-o');
hold on;
plot3(txPos(1), txPos(2), txPos(3), 'rp', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('收发机位置和移动轨迹');
legend('接收机轨迹', '发射机位置');
grid on; axis equal;
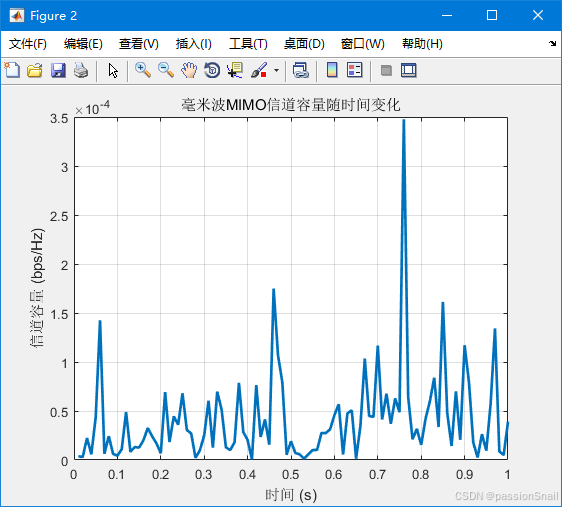
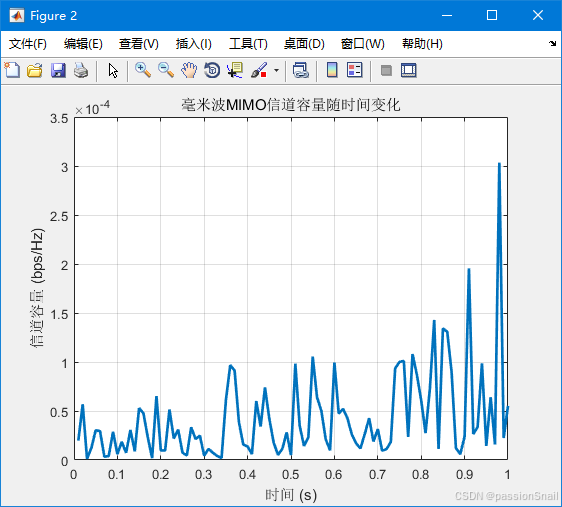
% 3.2 信道容量随时间变化
SNR_dB = 20; % 假设信噪比
capacity = zeros(1, numSnapshots);
for t = 1:numSnapshots
% 计算信道容量
sigma2 = 1/(10^(SNR_dB/10)); % 噪声功率
capacity(t) = log2(det(eye(Nr) + (1/sigma2)*H(:,:,t)*H(:,:,t)'));
end
figure;
plot((1:numSnapshots)*snapshotInterval, capacity, 'LineWidth', 2);
xlabel('时间 (s)');
ylabel('信道容量 (bps/Hz)');
title('毫米波MIMO信道容量随时间变化');
grid on;
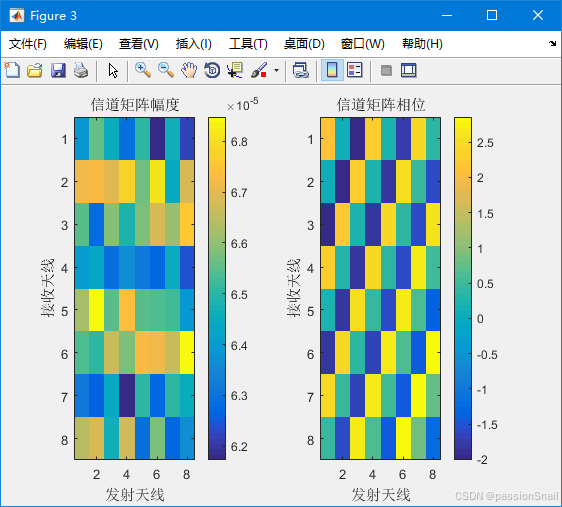
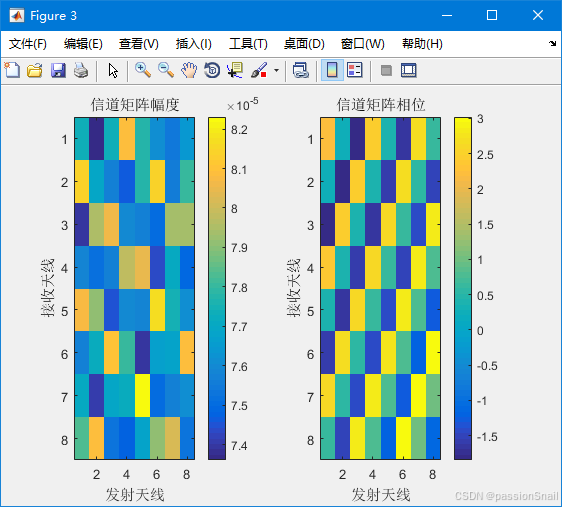
% 3.3 最后一个快拍的信道矩阵幅度和相位
figure;
subplot(1,2,1);
imagesc(abs(H(:,:,end)));
colorbar;
xlabel('发射天线');
ylabel('接收天线');
title('信道矩阵幅度');
subplot(1,2,2);
imagesc(angle(H(:,:,end)));
colorbar;
xlabel('发射天线');
ylabel('接收天线');
title('信道矩阵相位');
5. 进阶扩展 🚀
现在你已经掌握了基本的毫米波信道建模方法,可以尝试以下扩展:
5.1 加入更真实的路径损耗模型
function PL = mmWavePathLoss(fc, d, scenario)
% 3GPP TR 38.901路径损耗模型
% scenario: 'UMi' (城市微蜂窝), 'UMa' (城市宏蜂窝), 'InH' (室内热点)
c = 3e8;
lambda = c/fc;
switch scenario
case 'UMi'
% 城市微蜂窝场景
if d <= 18
PL = 32.4 + 21*log10(d) + 20*log10(fc/1e9);
else
PL = 32.4 + 40*log10(d) + 20*log10(fc/1e9) ...
- 9.5*log10(18^2 + (txPos(3)-rxPos(3))^2);
end
case 'InH'
% 室内热点场景
PL = 32.4 + 17.3*log10(d) + 20*log10(fc/1e9) ...
+ 0.5*d*randn(); % 加入随机阴影衰落
otherwise
% 默认使用自由空间路径损耗
PL = 20*log10(4*pi*d/lambda);
end
end
5.2 加入空间一致性
在移动场景中,相邻时刻的信道应该具有相关性。我们可以通过以下方式实现:
% 在信道生成函数中加入空间一致性
function [h, tau, AoD, AoA] = generateMmWaveChannelWithSC(...)
% 参数与之前相同,但加入空间一致性
persistent last_AoD last_AoA last_tau;
if isempty(last_AoD)
% 第一次调用,随机生成
[h, tau, AoD, AoA] = generateMmWaveChannel(...);
else
% 基于上次结果生成,加入小扰动
AoD = last_AoD + 0.1*randn(size(last_AoD));
AoA = last_AoA + 0.1*randn(size(last_AoA));
tau = last_tau + 1e-9*randn(size(last_tau));
% 重新生成信道系数
h = zeros(Nr, Nt, length(tau));
for p = 1:length(tau)
a_t = getArrayResponse(AoD(:,p), Nt, lambda);
a_r = getArrayResponse(AoA(:,p), Nr, lambda);
h(:,:,p) = alpha(p) * (a_r * a_t');
end
end
% 保存当前状态
last_AoD = AoD;
last_AoA = AoA;
last_tau = tau;
end
6. 完整代码整合 📜
以下是完整可运行的MATLAB 2016b兼容代码:
% 5G毫米波信道建模完整仿真 - MATLAB 2016b兼容
function mmWaveChannelModeling()
%% 主函数
clear all; close all; clc;
%% 1. 参数设置
fc = 28e9; % 载波频率28GHz
BW = 100e6; % 系统带宽100MHz
Ts = 1/BW; % 采样间隔
c = 3e8; % 光速
lambda = c/fc; % 波长
% 天线配置
Nt = 8; % 发射天线数
Nr = 8; % 接收天线数
antennaSpacing = lambda/2; % 天线间距
% 场景参数
roomSize = [20, 20, 3]; % 房间尺寸(长,宽,高)m
txPos = [2, 2, 1.5]; % 发射机位置
rxSpeed = 1; % 接收机移动速度 m/s
rxDirection = [1, 1, 0]; % 接收机移动方向
rxDirection = rxDirection/norm(rxDirection); % 归一化
% 仿真参数
numSnapshots = 100; % 快拍数
snapshotInterval = 0.01; % 快拍间隔(s)
%% 2. 信道仿真循环
H = zeros(Nr, Nt, numSnapshots); % 存储每个时刻的信道矩阵
rxPositions = zeros(3, numSnapshots); % 存储接收机位置
rxPos = 0;
for t = 1:numSnapshots
% 更新接收机位置
rxPos = rxPos + rxSpeed * rxDirection * snapshotInterval;
rxPositions(:,t) = rxPos;
% 确保接收机在房间内
rxPos = max([0.5, 0.5, 1], min(roomSize-[0.5,0.5,1], rxPos));
% 生成信道
[h, tau, AoD, AoA] = generateMmWaveChannel(Nt, Nr, fc, txPos, rxPos, roomSize);
% 存储信道矩阵(对所有路径求和)
H(:,:,t) = sum(h, 3);
end
%% 3. 结果可视化
% 3.1 接收机轨迹
figure;
plot3(rxPositions(1,:), rxPositions(2,:), rxPositions(3,:), 'b-o');
hold on;
plot3(txPos(1), txPos(2), txPos(3), 'rp', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('收发机位置和移动轨迹');
legend('接收机轨迹', '发射机位置');
grid on; axis equal;
% 3.2 信道容量随时间变化
SNR_dB = 20; % 假设信噪比
capacity = zeros(1, numSnapshots);
for t = 1:numSnapshots
% 计算信道容量
sigma2 = 1/(10^(SNR_dB/10)); % 噪声功率
capacity(t) = log2(det(eye(Nr) + (1/sigma2)*H(:,:,t)*H(:,:,t)'));
end
figure;
plot((1:numSnapshots)*snapshotInterval, capacity, 'LineWidth', 2);
xlabel('时间 (s)');
ylabel('信道容量 (bps/Hz)');
title('毫米波MIMO信道容量随时间变化');
grid on;
% 3.3 最后一个快拍的信道矩阵幅度和相位
figure;
subplot(1,2,1);
imagesc(abs(H(:,:,end)));
colorbar;
xlabel('发射天线');
ylabel('接收天线');
title('信道矩阵幅度');
subplot(1,2,2);
imagesc(angle(H(:,:,end)));
colorbar;
xlabel('发射天线');
ylabel('接收天线');
title('信道矩阵相位');
end
%% 信道生成函数
function [h, tau, AoD, AoA] = generateMmWaveChannel(Nt, Nr, fc, txPos, rxPos, roomSize)
c = 3e8; % 光速
lambda = c/fc; % 波长
% 1. 计算直射路径(LOS)
d_los = norm(txPos - rxPos);
tau_los = d_los / c;
% 2. 生成反射路径(NLOS) - 这里简化为4条反射路径
numReflections = 4;
tau_nlos = zeros(1, numReflections);
for i = 1:numReflections
% 简化的反射路径计算
reflectPoint = roomSize .* rand(1,3); % 随机反射点
d_nlos = norm(txPos - reflectPoint) + norm(reflectPoint - rxPos);
tau_nlos(i) = d_nlos / c;
end
% 合并所有路径时延
tau = [tau_los, tau_nlos];
[tau, idx] = sort(tau); % 按时延排序
% 3. 生成路径增益(简化模型)
PL_los = freeSpacePathLoss(fc, d_los); % 自由空间路径损耗
alpha_los = (randn(1) + 1i*randn(1)) / sqrt(2) * 10^(-PL_los/20);
alpha_nlos = zeros(1, numReflections);
for i = 1:numReflections
d = tau_nlos(i) * c;
PL_nlos = freeSpacePathLoss(fc, d) + 10; % NLOS比LOS多10dB损耗
alpha_nlos(i) = (randn(1) + 1i*randn(1)) / sqrt(2) * 10^(-PL_nlos/20);
end
alpha = [alpha_los, alpha_nlos];
alpha = alpha(idx); % 按时延排序增益
% 4. 生成角度信息(简化)
AoD = zeros(2, length(tau)); % 每列是一个路径的[方位角;仰角]
AoA = zeros(2, length(tau));
% LOS路径角度
[az_los, el_los] = computeAngles(txPos, rxPos);
AoD(:,1) = [az_los; el_los];
AoA(:,1) = [-az_los; -el_los];
% NLOS路径角度
for i = 2:length(tau)
AoD(:,i) = [rand()*2*pi-pi; rand()*pi-pi/2]; % 随机角度
AoA(:,i) = [rand()*2*pi-pi; rand()*pi-pi/2];
end
% 5. 构建MIMO信道矩阵
h = zeros(Nr, Nt, length(tau));
for p = 1:length(tau)
% 发射端阵列响应向量
a_t = getArrayResponse(AoD(:,p), Nt, lambda);
% 接收端阵列响应向量
a_r = getArrayResponse(AoA(:,p), Nr, lambda);
h(:,:,p) = alpha(p) * (a_r * a_t');
end
end
%% 辅助函数
function PL = freeSpacePathLoss(fc, d)
% 自由空间路径损耗计算
lambda = 3e8/fc;
PL = 20*log10(4*pi*d/lambda);
end
function [az, el] = computeAngles(txPos, rxPos)
% 计算从tx到rx的方位角和仰角
vec = rxPos - txPos;
az = atan2(vec(2), vec(1));
el = atan2(vec(3), sqrt(vec(1)^2 + vec(2)^2));
end
function a = getArrayResponse(angle, N, lambda)
% 生成阵列响应向量
% angle: [方位角; 仰角]
% N: 天线数
% lambda: 波长
az = angle(1); % 方位角
el = angle(2); % 仰角
d = lambda/2; % 天线间距
positions = (0:N-1)*d;
% 阵列响应向量
a = exp(-1i*2*pi*positions'*sin(az)*cos(el)/lambda);
a = a / sqrt(N); % 归一化
end
7. 总结与展望 🎯
通过本教程,我们实现了一个简化的毫米波MIMO信道模型,包括:
- 多径效应建模:考虑了LOS和NLOS路径
- 空间特性建模:使用阵列响应向量捕捉空间特性
- 时变特性:模拟了移动场景下的信道变化
- 可视化分析:功率时延谱、角度谱、信道矩阵等
要进一步改进模型,可以考虑:
- 加入更精确的3GPP信道模型
- 实现更复杂的空间一致性模型
- 考虑极化效应和天线方向图
- 加入阻塞(blockage)效应建模
希望这篇教程能帮助你快速入门5G毫米波信道建模!如果有任何问题,欢迎留言讨论。Happy coding! 🚀👨💻
![57.[前端开发-前端工程化]Day04-webpack插件模式-搭建本地服务器](https://i-blog.csdnimg.cn/direct/65a5bbd2e84a449c810dba872b13e55a.png)