1. 概述
| 底盘模型 | 驱动 | 场景 | 优势 | 劣势 |
|---|---|---|---|---|
| 双轮差速 | 两轮驱动 | 室内AGV | 结构简单、成本低 | 转弯半径大,易打滑 |
| 四轮差速 | 四轮独立驱动 | 复杂地形无人车 | 全方位转向,机动性强 | 控制复杂,能耗高 |
| 阿克曼模型 | 前轮转向+后驱 | 户外无人驾驶车 | 高速稳定性好 | 转弯半径大,转向机构复杂 |
| 麦克纳姆轮 | 四轮全向驱动 | 低速短距离全向机器人 | 全向移动,空间利用率高 | 成本高,场地要求较高,磨损较大 |
| 四全向轮 | 四轮全向驱动 | 仓库物流车、随动轮 | 磨损程度和能耗比麦轮小 | 运动学解算复杂 |
| 三全向轮 | 三轮全向驱动 | 同上 | 结构简单,成本低 | 同上 |
| 四舵轮 | 4轮独立驱动+独立转向 | 优越的通过性和越野性 | 动力强,载重大、灵活、原地转向 | 成本相对较高 |
| 双舵轮 | 2轮独立驱动+转向 | 中等载重AGV | 任意方向平移、原地转向 | 运动需要两舵轮差动实现 |
| 单舵轮 | 单舵轮 | 牵引车、叉车 | 结构简单、成本低 | 行驶过程中容易发生偏移 |
| 履带 | 双轮驱动 | 越野车 | 通过性和爬坡强,适用于多种复杂场地 | 滑动转向阻力大,对履带的磨损较大 |
2. 双轮差速
两轮差速底盘由两个动力轮位于底盘左右两侧,两轮独立控制速度,通过给定不同速度实现底盘转向控制。一般会配有一到两个辅助支撑的万向轮。

3. 四轮差速
四轮差速结构是以电机左右差动为转向动力源,动力从电机输出之后,经过减速机最后分别输送至左右侧前后轴最终到达车轮。

4. 阿克曼模型
结构底盘类似现实中真实的汽车底盘,通过前轮转向时的内外轮角度差实现稳定转弯,用于控制小车运动方向,后两轮驱动控制用于控制速度。

5. 麦克纳姆轮底盘
麦克纳姆轮是一种特殊的车轮,由轮毂和辊子组成:轮毂是整个轮子的主体支架,辊子则是安装在轮毂上的被动运动小轮,市面上轮毂轴线与辊子转轴夹角大致可分30度、45度、60度三种,底盘需要平行共线或者成对安装使用。


6. 全向轮底盘(四轮)
相比之下,麦轮结构中滚珠的运动方向与轮毂的方向呈45度夹角,在全向轮结构中,滚珠的运动方向与轮毂的运动方向呈直角,即90度夹角。底盘在纵向(主轮驱动方向)和横向(小滚轮滚动方向)同时受力,实现横向平移、斜向移动、原地旋转等全向运动,无需传统转向机构。


7. 全向轮底盘(三轮)
轮子之间以120度的夹角进行摆放安装,因此3个轮子的话,彼此之间总共形成了一个平面上的360度角。通过合成连接在3个不同全向轮上的电机的合力矢量,就可以实现底盘360度的转向与运动。

8. 四转四驱底盘
通过4个舵轮的转角及速度实现AGV的直行、平移、转向及避障等动作,电机动力直接转化为驱动动力,转向机构则由单独的电机进行控制,结构上简单紧凑。采用四舵轮底盘结构的AGV可以同时满足狭窄工作空间下的灵活性要求和车间复杂路面条件下的适用性要求。
| 差速轮 | 卧式舵轮 | 立式舵轮 |
|---|---|---|
 |  |  |

9. 双舵轮
底盘由两个驱动轮和一个或多个随动轮组成,通常应用于中等载重的AGV上。双舵轮底盘结构设计可以实现360°回转功能,也可以实现万向横移,灵活性高且具有精确的运行精度。


10. 单舵轮
单舵轮驱动结构由1个舵轮和2个定向轮组成,在叉车上面有着非常广泛的应用。这种结构可以直接适应各种地面,保证驱动舵轮一定着地。根据车重心分布的不同,舵轮是大概会承担50%的自重,所以牵引力非常强,由于是单轮驱动,无需考虑电机配合问题,适用于广泛的环境和场合。

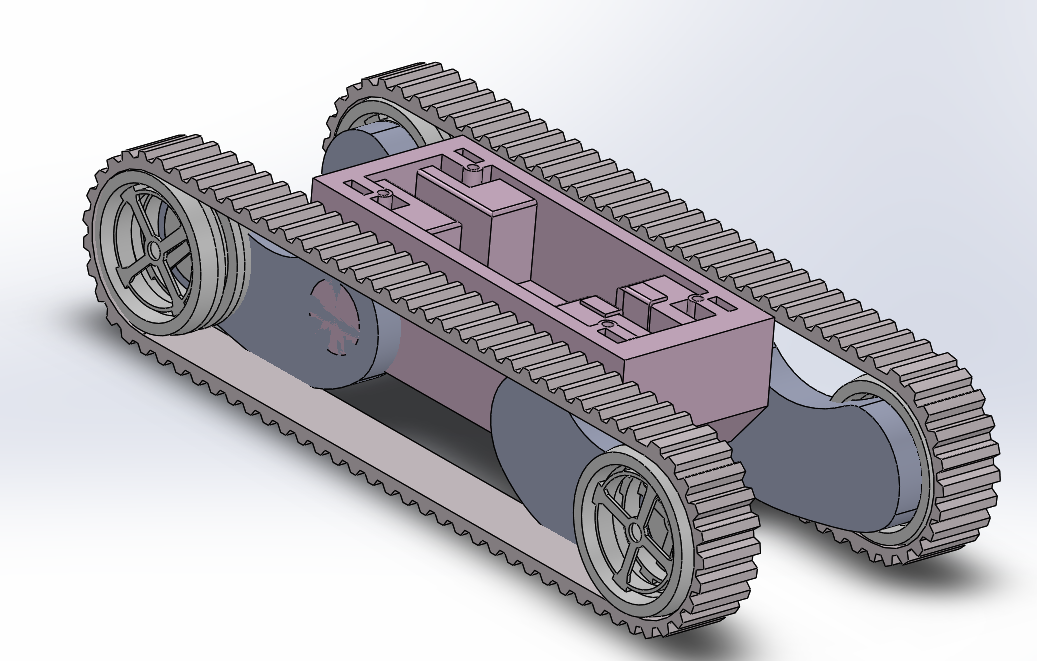
10. 履带底盘
履带底盘分为钢制履带底盘和橡胶履带底盘两大类产品,钢制底盘承载能力在2吨——120吨之前 ,橡胶底盘承载能力在0.5吨——12吨之间。
![BUUCTF-[GWCTF 2019]re3](https://i-blog.csdnimg.cn/img_convert/730b9bfcf31517e9d5835f9bdcf201f9.png)