导言
《STM32F103_HAL库+寄存器学习笔记15 - 梳理CAN发送失败时,涉及哪些寄存器》从上一章节看到,当CAN消息发送失败时,CAN错误状态寄存器ESR的TEC会持续累加,LEC等于0x03(ACK错误)。本次实验的目的是编写一个函数CAN_Check_Error(),在main()的主循环里每隔50ms执行一次,将寄存器CAN_ESR的各个段赋值给全局变量gCanESR,方便应用程序获取寄存器CAN_ESR的各个段的内容。
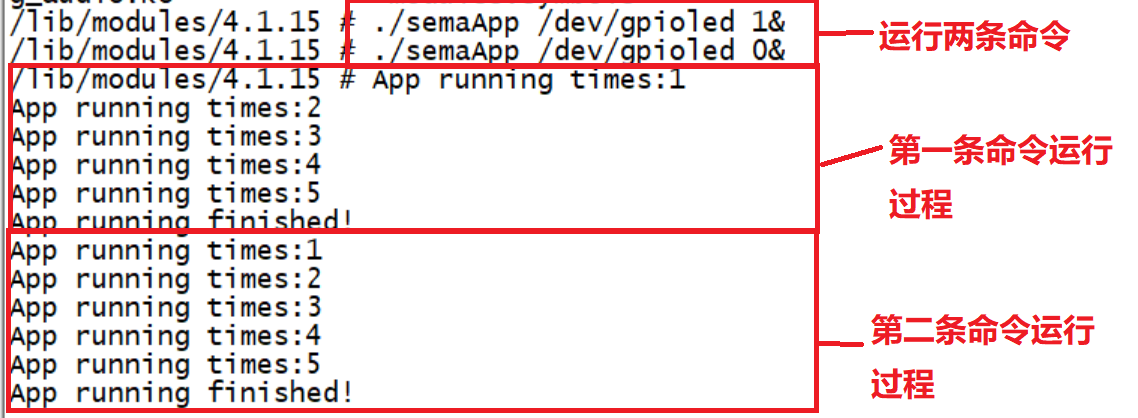
效果如下:

项目地址:https://github.com/q164129345/MCU_Develop/tree/main/stm32f103_ll_library16_Can_Send_Error
一、代码(寄存器)
1.1、myCanDrive_reg.c


1.2、myCanDrive_reg.h

1.3、main.c

如上所示,CAN通讯正常的情况下,条件if是不会成立的。
1.4、编译、下载

编译成功,没有错误。
二、细节补充
2.1、为什么CAN分析仪关闭CAN1通道后,LEC = 0x03(确认ACK错误)?

如上所示,当CAN分析仪关闭CAN1通道后,LEC = 0x03、TEC很快就递增到128。

如上所示,LEC等于二进制011(十进制3)时,表示确认(ACK)错误。简单来说,就是STM32F103将CAN消息发送出去后,没有其他CAN节点回复ACK,最终触发确认ACK错误。
CAN的ACK机制原理
- ACK槽(ACK Slot):每个CAN帧的末尾包含1位ACK槽,发送节点会将其置为隐性(1)。
- 接收节点责任:所有正常工作的接收节点(包括目标节点和其他监听节点)必须在ACK槽位置将其拉为显性(0),表示已正确接收。
- 错误触发条件:若总线上无任何节点响应ACK,发送节点检测到ACK槽仍为隐性(1),则会触发ACK错误(LEC=0x03)。

2.2、怎样触发Bus-off离线状态?

我尝试在物理层上制造问题,将CAN总线的CANH与CANL短接就能让STM32F103开发板进入Bus-off离线状态。
2.3、进入Bus-off离线状态后,怎样用代码自动恢复?


如上所示,当检查到是bus-off错误后,调用函数CAN_BusOff_Recover()恢复外设CAN的接收与发送功能。

如上所示,当我将物理层的CANH、CANL短接后,CAN_ESR寄存器的TEC快速暴增至254,且LEC=5(显性位错误),最终触发Bus-off离线状态。接着运行函数CAN_BusOff_Recover()恢复正常工作,顺利发送与接收CAN报文。