1. 创建actor
1.1 actor的创建与句柄
actor是GymAsset的实例。函数create_actor将一个参与者添加到环境中,并返回一个参与者句柄,该句柄可用于以后与该参与者交互。出于性能原因,最好在actor创建期间保存句柄,而不是在模拟运行时每次都查找句柄:
# cache useful handles
envs = []
actor_handles = []
print("Creating %d environments" % num_envs)
for i in range(num_envs):
# create env
env = gym.create_env(sim, env_lower, env_upper, num_per_row)
envs.append(env)
# add actor
actor_handle = gym.create_actor(env, asset, pose, "actor", i, 1)
actor_handles.append(actor_handle)
参与者句柄特定于创建参与者的环境。对参与者进行操作的API函数需要环境引用和参与者句柄,因此通常将它们缓存在一起。
有相当多的功能对参与者起作用。它们被命名为get_actor_*、set_actor_或apply_cactor_。使用API参考获取完整列表。
1.2 Aggregates(聚合)
Aggregates仅用于PhysX;
聚合是actors的集合。聚合不提供额外的模拟功能,但允许您告诉PhysX一组actors将聚集在一起,从而允许PhysX优化其空间数据操作。不需要创建聚合,但这样做可以适度提高性能。要将多个actors放置到聚合中,应将对create_actor的调用括在对begin_aggregate和end_aggregate的调用之间:
gym.begin_aggregate(env, max_bodies, max_shapes, True)
gym.create_actor(env, ...)
gym.create_actor(env, ...)
gym.create_actor(env, ...)
...
gym.end_aggregate(env)
聚合中只能包含来自同一env的actors。创建聚合时,需要指定刚体和形状的最大数量,这应该是将放置在聚合中的所有actors的刚体和形状总数。可以从用于创建参与者的资产(`` ,get_asset_rigid_shape_count)中获取此信息。
实例:python/rlgpu/tasks/franka.py
2. actor组件
每个角色都有一组刚体、关节和自由度。可以这样计算:
num_bodies = gym.get_actor_rigid_body_count(env, actor_handle)
num_joints = gym.get_actor_joint_count(env, actor_handle)
num_dofs = gym.get_actor_dof_count(env, actor_handle)
此时,一旦创建了参与者,就不可能添加或删除参与者组件。
3.1 刚体
每个刚体由一个或多个刚性形状组成。可以为每个角色自定义刚体和形状属性,如body_physics_props.py中所示.
4. Controlling Actors
使用自由度来控制参与者。对于每个自由度,可以设置驱动模式、限制、刚度、阻尼和目标。您可以为每个参与者设置这些值,并覆盖从资源加载的默认设置。
5. Actor缩放
可以在运行时缩放其大小。缩放角色将更改其碰撞几何体、质量属性、关节位置和棱柱关节限制。参考:examples/actor_scaling.py
5.1 DOF特性和驱动模式
可以访问资产(get_asset_DOF_properties)和单个参与者(get_actor_DOF_properties/set_actor_DOF _properties)的DOF属性数组。返回具有以下字段的结构化Numpy数组:
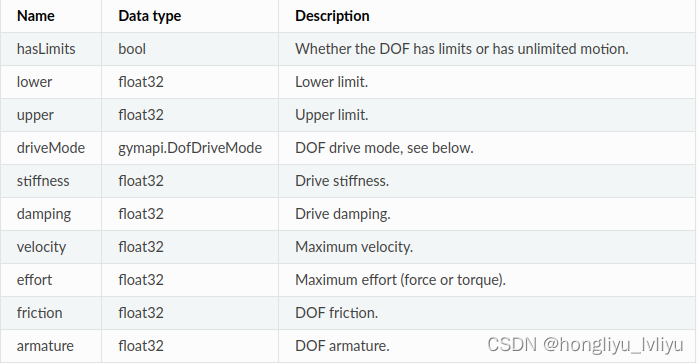
(具体细节描述与参考详见官方文档:Programming-phsics simulation-Scaling actors)
5.2 张量控制API
新的张量API提供了应用控件的替代方法。设置DOF属性的API保持不变,但您可以使用CPU或GPU张量施加力或设置PD目标。这使得完全在GPU上运行模拟成为可能,而无需在主机和设备之间复制数据。
6. 物理状态
Gym提供了一个API,用于获取和设置结构化Numpy数组的物理状态。
6.1 刚体状态
刚体状态包括位置(Vec3)、方向(Quat)、线速度(Vec3)和角速度(Vec3)。这允许您在最大坐标中处理模拟状态。
可以获取actor、环境或整个模拟的刚体状态数组:
body_states = gym.get_actor_rigid_body_states(env, actor_handle, gymapi.STATE_ALL)
body_states = gym.get_env_rigid_body_states(env, gymapi.STATE_ALL)
body_states = gym.get_sim_rigid_body_states(sim, gymapi.STATE_ALL)
这些方法返回结构化numpy数组。最后一个参数是一个位字段,用于指定应返回的状态类型。STATE_POS表示应计算位置,STATE_VEL表示应计算速度,STATE_ALL表示应计算两者。返回的数组的结构始终相同,但只有设置了相应的标志时,才会计算位置和速度值。在内部,Gym维护存储这些值的状态缓存缓冲区。Numpy数组只是缓冲区切片的包装器。根据基础物理引擎的不同,获取和设置状态可能需要非平凡的计算,并且可以使用位标志来避免不必要的操作。
可以这样访问状态数组切片:
body_states["pose"] # all poses (position and orientation)
body_states["pose"]["p"]) # all positions (Vec3: x, y, z)
body_states["pose"]["r"]) # all orientations (Quat: x, y, z, w)
body_states["vel"] # all velocities (linear and angular)
body_states["vel"]["linear"] # all linear velocities (Vec3: x, y, z)
body_states["vel"]["angular"] # all angular velocities (Vec3: x, y, z)
可以使用相应的方法编辑并设置状态:
gym.set_actor_rigid_body_states(env, actor_handle, body_states, gymapi.STATE_ALL)
gym.set_env_rigid_body_states(env, body_states, gymapi.STATE_ALL)
gym.set_sim_rigid_body_states(sim, body_states, gymapi.STATE_ALL)
实例:projectiles.py
要确定状态阵列中特定刚体的偏移,请使用find_actor_rigid_body_index方法:
i1 = gym.find_actor_rigid_body_index(env, actor_handle, "body_name", gymapi.DOMAIN_ACTOR)
i2 = gym.find_actor_rigid_body_index(env, actor_handle, "body_name", gymapi.DOMAIN_ENV)
i3 = gym.find_actor_rigid_body_index(env, actor_handle, "body_name", gymapi.DOMAIN_SIM)
使用域domain_ACTOR获取get_ACTOR_rigid_body_states返回的状态缓冲区的索引;
使用域domain_ENV获取get_ENV_rigid_body_states返回的状态缓冲区的索引;
使用域domain_SIM获取get_SIM_rid_body_states返回的状态缓冲区的索引.
6.2 DOF状态
您还可以使用简化坐标与actors合作:
dof_states = gym.get_actor_dof_states(env, actor_handle, gymapi.STATE_ALL)
gym.set_actor_dof_states(env, actor_handle, dof_states, gymapi.STATE_ALL)
DOF状态数组包括作为单个浮点数的位置和速度。对于线性自由度,位置单位为米,速度单位为米/秒。对于角DOF,位置以弧度为单位,速度以弧度/秒为单位。
您可以这样访问位置和速度切片:
dof_states["pos"] # all positions
dof_states["vel"] # all velocities
可以使用find_actor_DOF_index方法确定特定DOF的偏移。
注意,DOF状态不包括根刚体的姿势或速度,因此它们不能完全捕捉演员状态。因此,我们没有提供获取和设置整个环境或模拟的DOF状态的方法。
实例:joint_monkey.py
6.3 物理状态张量API
新的张量API允许使用CPU或GPU张量获取和设置状态。这使得完全在GPU上运行模拟成为可能,而无需在主机和设备之间复制数据。
![[同向双指针] 209. 长度最小的子数组 713. 乘积小于 K 的子数组 3. 无重复字符的最长子串](https://img-blog.csdnimg.cn/86bd1b4f179949488e4183c3781f3c63.png)






![[iOS]MonkeyDev安装](https://img-blog.csdnimg.cn/3bcf60f4fd7e41b4a14821205cd2942e.png)