目录
一、示例
二、发射机
三、目标
四、接收机
五、结果和显示
六、总结
七、程序
此示例演示如何仿真具有两个目标的双基地雷达系统。双基地雷达的发射器和接收器不位于同一位置,而是沿着不同的路径移动。
一、示例
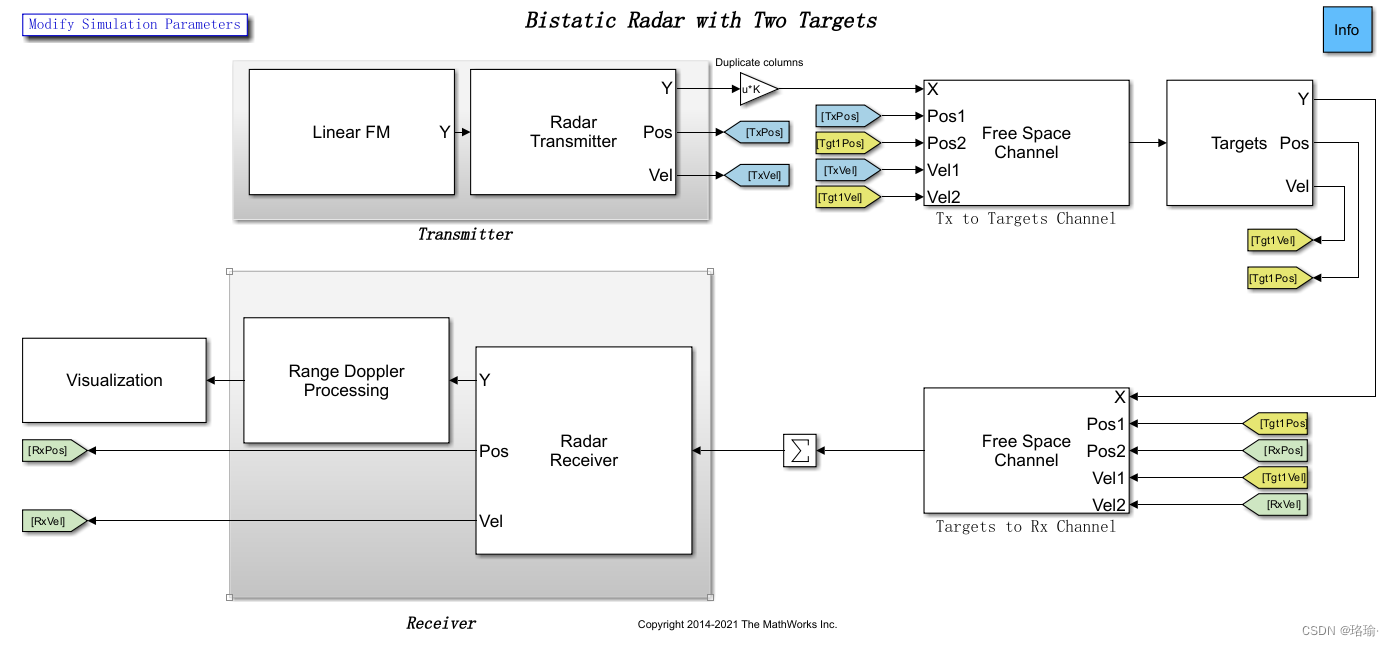
以下模型显示了双基地雷达系统的端到端仿真。该系统分为三部分:发射机子系统、接收机子系统和目标及其传播信道。该模型显示了从发射器流经通道到达目标并反射回接收器的信号。然后在接收器上执行距离多普勒处理,以生成接收回波的距离多普勒图。
二、发射机
-
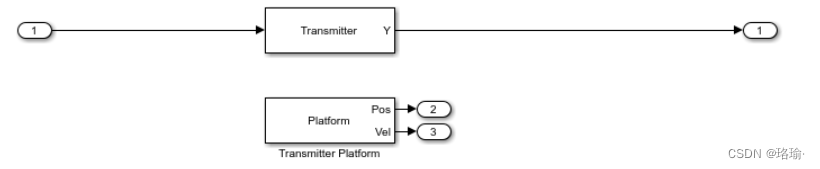
Linear FM- 创建线性FM脉冲作为发射机波形。信号扫描3 MHz带宽,对应于50米的距离分辨率。 -
Radar Transmitter- 放大脉冲并模拟发射器运动。在这种情况下,变送器安装在位于原点的固定平台上。发射器的工作频率为 300 MHz。
三、目标
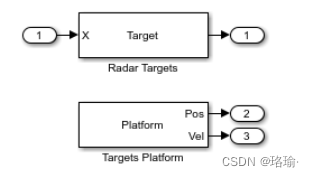
此示例包括两个具有相似配置的目标。目标安装在移动平台上。
-
Tx to Targets Channel- 将信号从发射器传播到目标。通道块的信号输入和输出有两列,一列用于传播到每个目标的路径。 -
Targets to Rx Channel- 将信号从目标传播到接收器。通道块的信号输入和输出有两列,一列用于每个目标的传播路径。 -
Targets- 反射入射信号并模拟两个目标的运动。RCS 为 2.5 平方米的第一个目标距离发射器约 15 公里,以 141 m/s 的速度移动。RCS 为 4 平方米的第二个目标距离发射器约 35 公里,并以 168 m/s 的速度移动。两个目标的RCS在底层目标块的平均雷达截面参数中指定为两个元素的矢量。
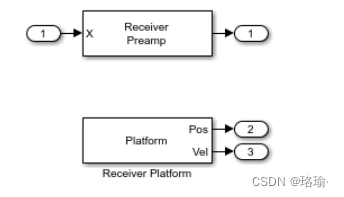
四、接收机
-
Radar Receiver- 接收目标回声,添加接收器噪声,并模拟接收器运动。发射器和接收器之间的距离为20 km,接收器以20 m / s的速度移动。接收器与两个目标之间的距离分别约为5公里和15公里。
-
Range-Doppler Processing- 计算接收信号的距离多普勒图。接收到的信号被缓冲以形成64脉冲突发,然后传递到距离多普勒处理器。处理器沿距离维度执行匹配滤波器操作,沿多普勒维度执行FFT。

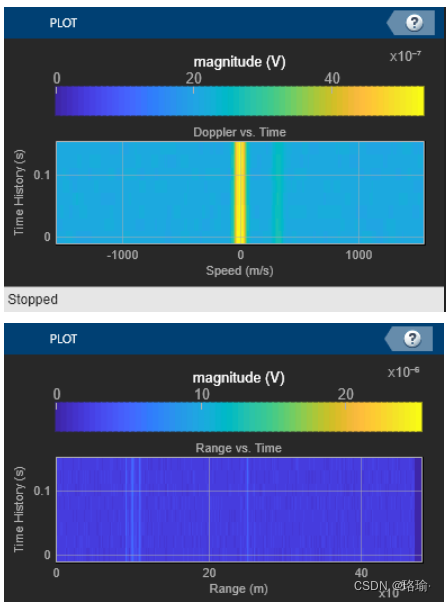
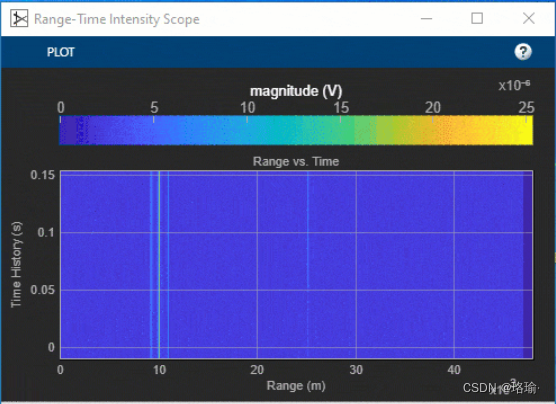
五、结果和显示
下图显示了距离-多普勒图中的两个目标,距离-时间强度图和多普勒时间强度图。
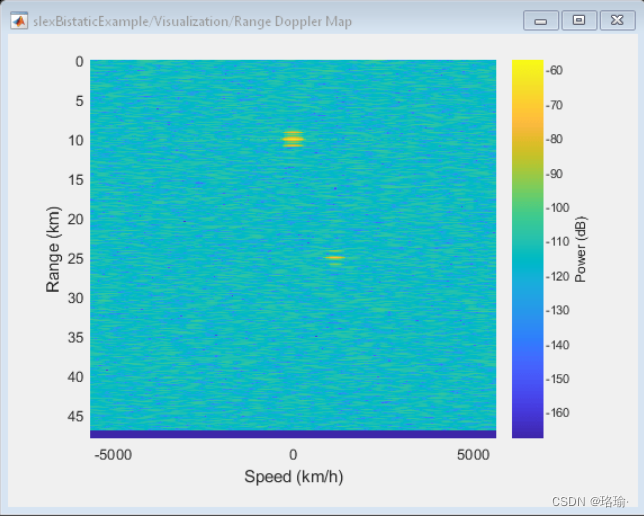
因为这是一个双基地雷达,所以上面的距离多普勒图实际上将目标范围显示为从发射器到目标以及从目标到接收器的距离的算术平均值。因此,第一个目标的预期射程约为10公里((15+5)/2),第二个目标的预期射程约为25公里((35+15)/2)。距离多普勒映射这两个值作为测量值。
同样,双基地配置中目标的多普勒频移是目标相对于发射器和接收器的多普勒频移之和。第一个目标与发射器的相对速度为-106.4 m/s,第二个目标为161.3 m/s,而第一个目标与接收器的相对速度为99.7 m/s,第二个目标为158.6 m/s。因此,距离多普勒图显示第一个目标和第二个目标的总体相对速度分别为-6.7 m/s(-24 km/h)和319.9 m/s(1152 km/h),与期望的总和值一致。
范围-时间强度范围和多普勒时间强度范围显示滚动范围和多普勒响应强度随时间的变化,与测量值范围和速度值相匹配。
六、总结
本示例显示了具有两个目标的端到端双基地雷达系统仿真。它解释了如何通过绘制距离多普勒图来分析目标返回。
七、程序
使用Matlab R2022b版本,点击打开。
 打开下面的“slexBistaticExample.slx”文件,点击运行,就可以看到上述效果。
打开下面的“slexBistaticExample.slx”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:模拟具有两个目标的双基地雷达,发送源码链接。