目录
- 一、AVL树介绍
- 1.1 概念
- 1.2 定义
- 二、AVL树的实现
- 2.1 插入
- 2.2 旋转
- 2.2.1 左单旋
- 2.2.2 右单旋
- 2.2.3 左右双旋
- 2.2.4 右左双旋
一、AVL树介绍
1.1 概念
AVL树是高度平衡的二叉搜索树,相比普通的二叉搜索树,它防止了变成单支树的情况。因为AVL树每插入一个新的节点,它都会调整使左右子树的高度差的绝对值不超过1,从而降低了树的高度,提高了搜索效率。
特点:
- 左右子树都是AVL树
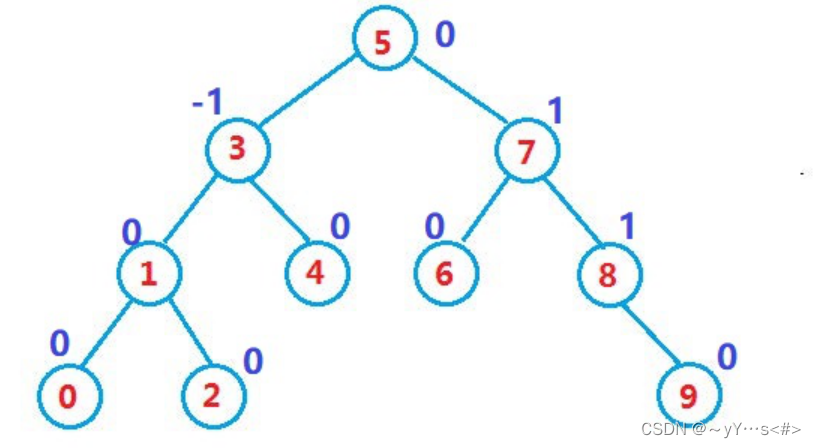
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
- 搜索时间复杂度O( l o g 2 n log_2 n log2n)
- 有平衡因子控制高度差:右子树高度减去左子树高度
1.2 定义
AVL树是三叉链结构,即左孩子指针、右孩子指针和双亲指针,多了一个双亲指针方便找到上一个节点。定义它的数据域,为kv模型的类型。定义平衡因子,作用是记录当前节点的左右子树高度之差。
template<class K, class V>
struct AVLTreeNode
{
AVLTreeNode<K, V>* _left;
AVLTreeNode<K, V>* _right;
AVLTreeNode<K, V>* _parent;
int _bf;
pair<K, V> _kv;
AVLTreeNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _bf(0)
, _kv(kv)
{}
};
二、AVL树的实现
2.1 插入
AVL树的插入过程与二叉搜索树的插入过程是一样的,只不过在此基础上增加了调整节点的平衡因子。所以总结为两个步骤:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
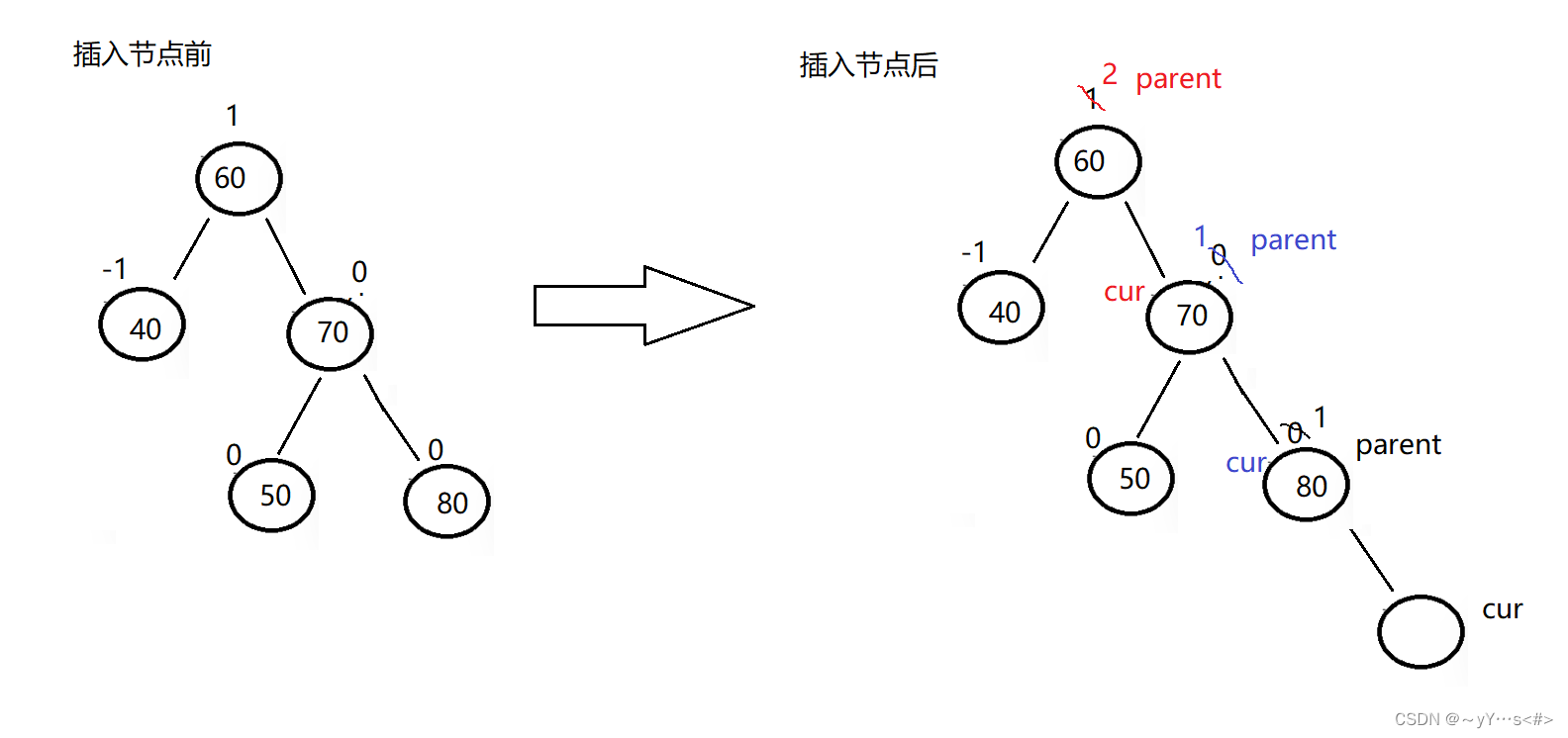
没标数字的是新插入的节点
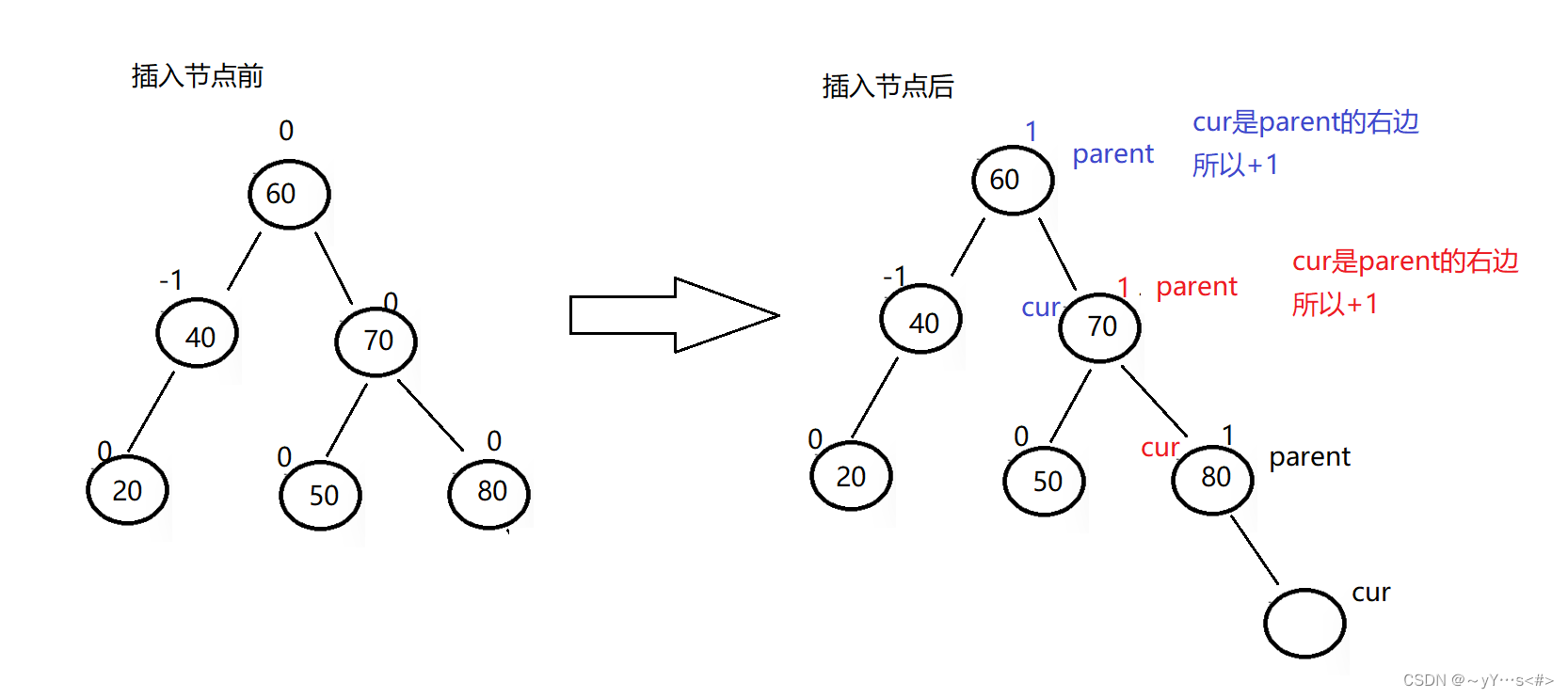
调整平衡因子,首先要从cur和parent入手,即新插入的节点和插入节点的上一个节点。如果插入节点cur是parent的右边,则parent的平衡因子+1;反之,则-1。整个调整过程是一个循环,因为刚开始改变的是下面的平衡因子,上面节点的平衡因子也可能会随之改变。循环条件为parent不为空,还要其他条件可以终止循环,下面细讲。
所以根据parent的平衡因子的值可以分为3步:
- parent的平衡因子为0
- parent的平衡因子为1或者-1
- parent的平衡因子为2或者-2
这里说明下,没有parent的平衡因子可能为3/-3的情况,如果出现了说明之前的树有问题
1️⃣parent的平衡因子为0
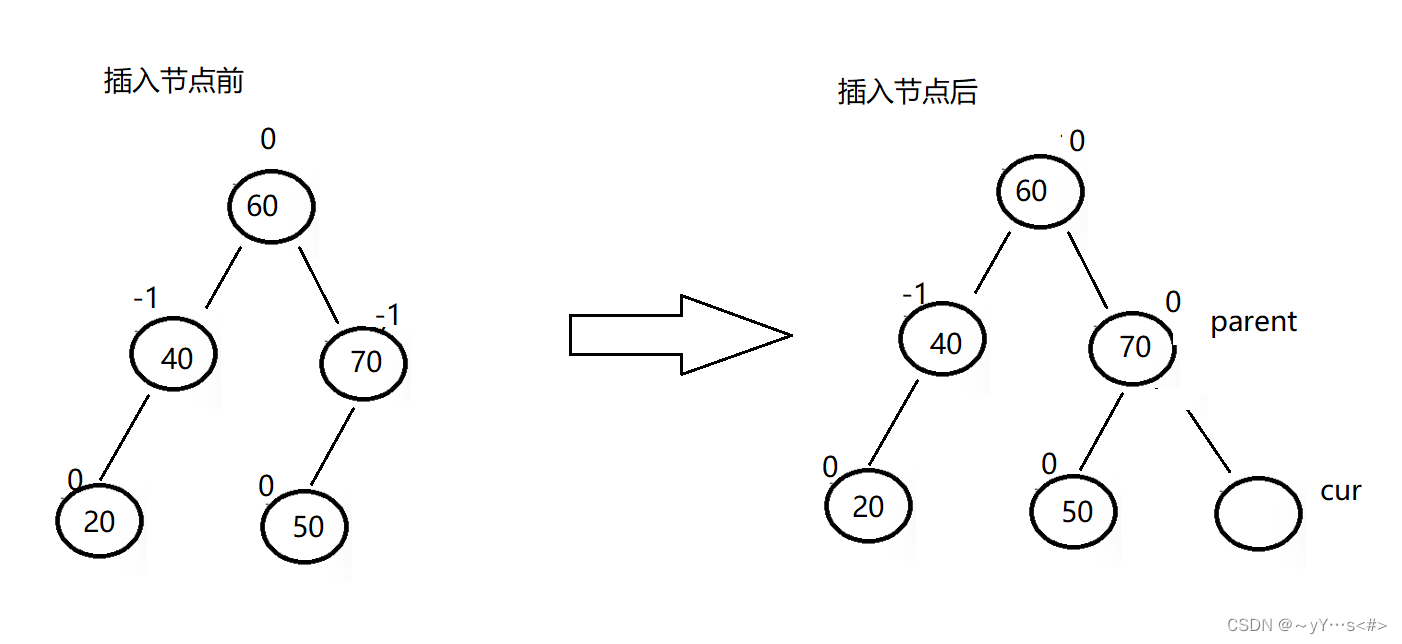
此情况说明原来的parent的左边或者右边存在一个节点,新插入的节点在parent没有节点的一侧,parent两边都有节点,平衡因子为0,不影响上面的节点,调整结束,跳出循环。
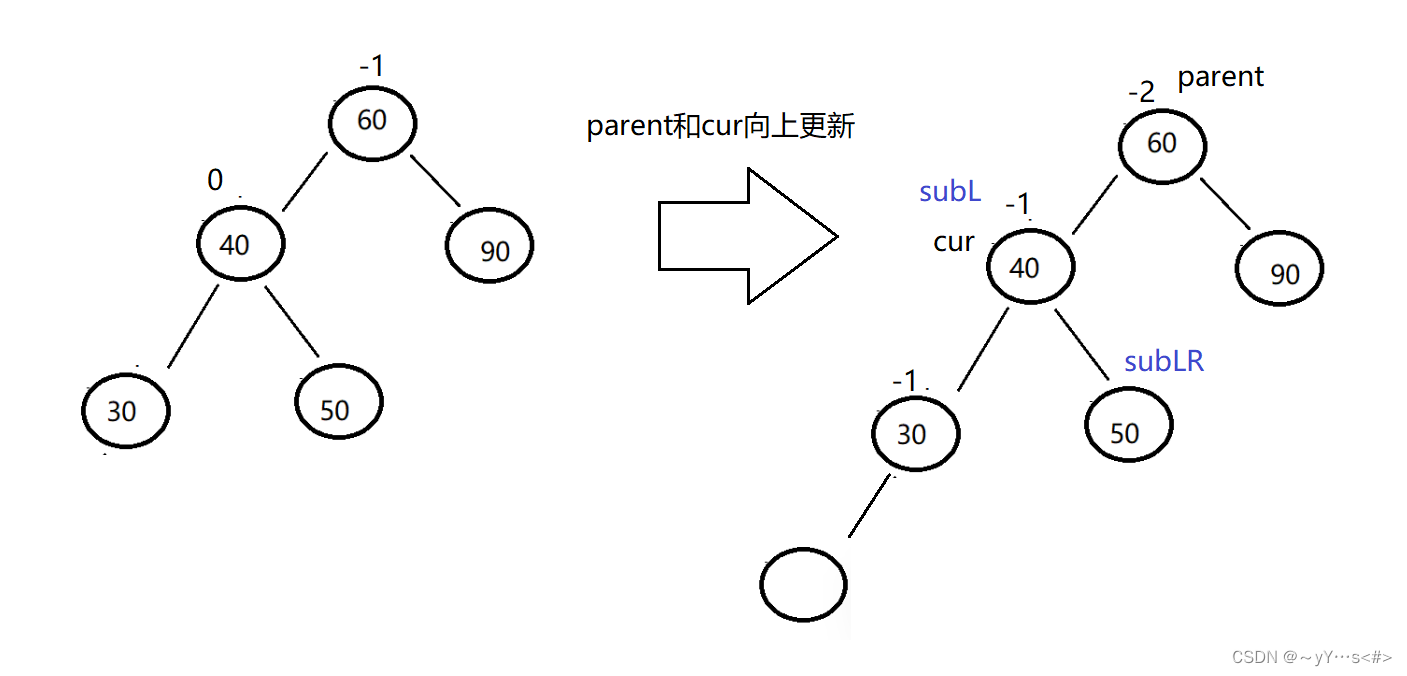
2️⃣parent的平衡因子为1或者-1
如果parent的平衡因子为1或者-1,则会影响上面的节点,所以让parent节点转换为它的上一个节点,cur转换为parent,向上更新,以次类推。每次循环还是要经过cur是parent的左边还是右边,才能确定parent的平衡因子是+1还是-1。直到cur为根节点,parent为空时循环结束。
3️⃣parent的平衡因子为2或者-2
当parent向上更新,到某个节点时(有可能不是根节点)它的平衡因子为2或者-2,这时违背了AVL树的规则,因此要进行处理——旋转,来改变树的高度差,使其左右之树的高度差的绝对值不超过1
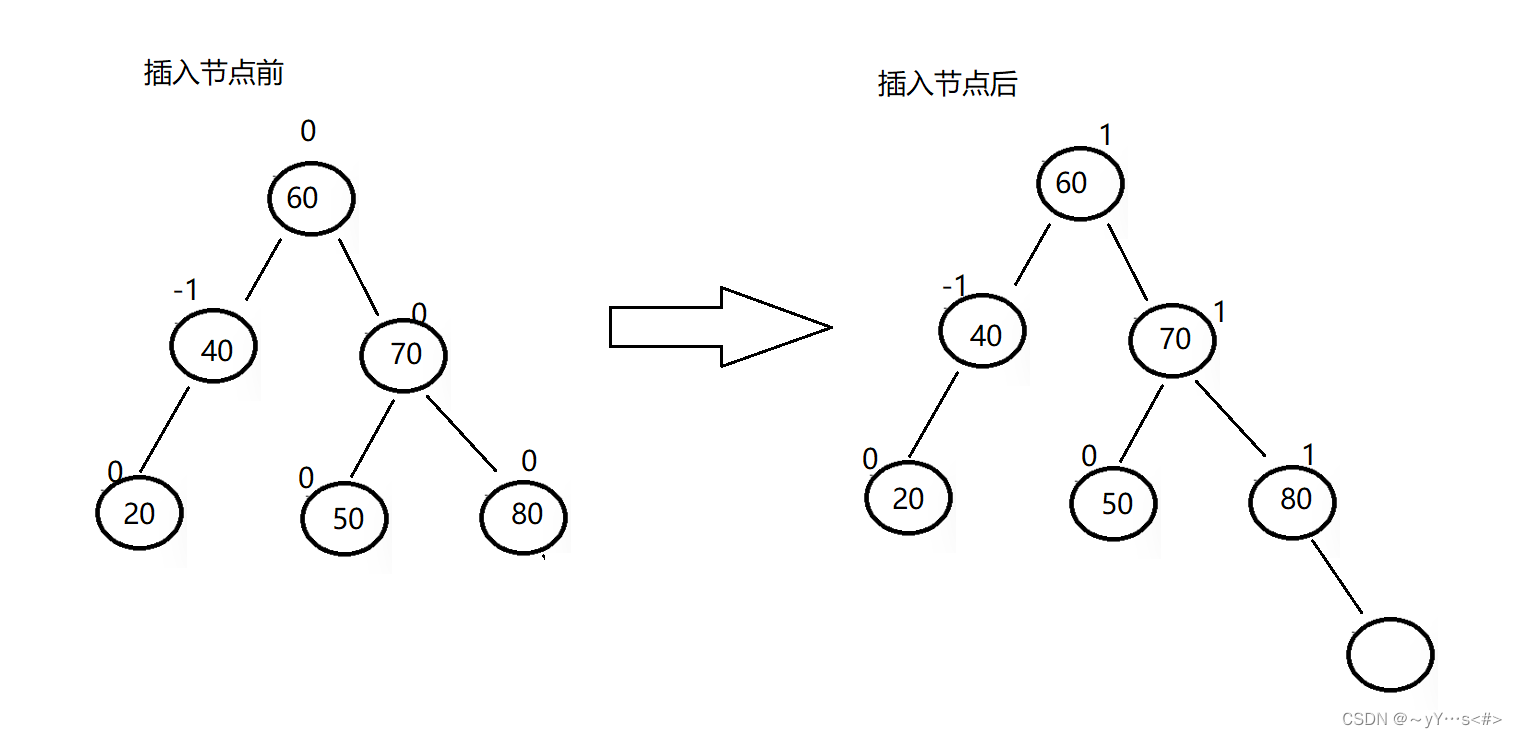
下图的树插入节点后要发生旋转
旋转后,高度差恢复平衡,跳出循环。
总结:
AVL树插入节点要进行调整平衡因子,调整结束有3种:
1.parent为空——已经调整到根节点了
2.parent的平衡因子为0——不影响上面节点
3.旋转后——树恢复平衡状态
代码:
//插入
bool Insert(const pair<K, V>& kv)
{
//如果根为空
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
//非空
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;//有重复不能插入
}
}
cur = new Node(kv);
if (parent->_kv.first < kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
//调整平衡因子
while (parent)
{
if (parent->_left == cur)
{
parent->_bf--;
}
else
{
parent->_bf++;
}
if (parent->_bf == 0)//不需要修改,直接跳出
{
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)//向上更新
{
cur = cur->_parent;
parent = parent->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)//要旋转
{
//旋转有4种情况
if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);//左单旋
}
else if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);//右单旋
}
else if (parent->_bf == -2 && cur->_bf == 1)
{
RotateLR(parent);//左右双旋-先左后右
}
else
{
RotateRL(parent);//右左双旋-先右后左
}
break;//旋转后跳出
}
else
{
assert(false);//之前树就有问题
}
}
return true;
}
2.2 旋转
这里就开始详细分析AVL树的旋转了,旋转分为4种情况,有左单旋、右单旋、左右双旋和右左双旋。发生这4种旋转的条件不一样,下面逐个分析:
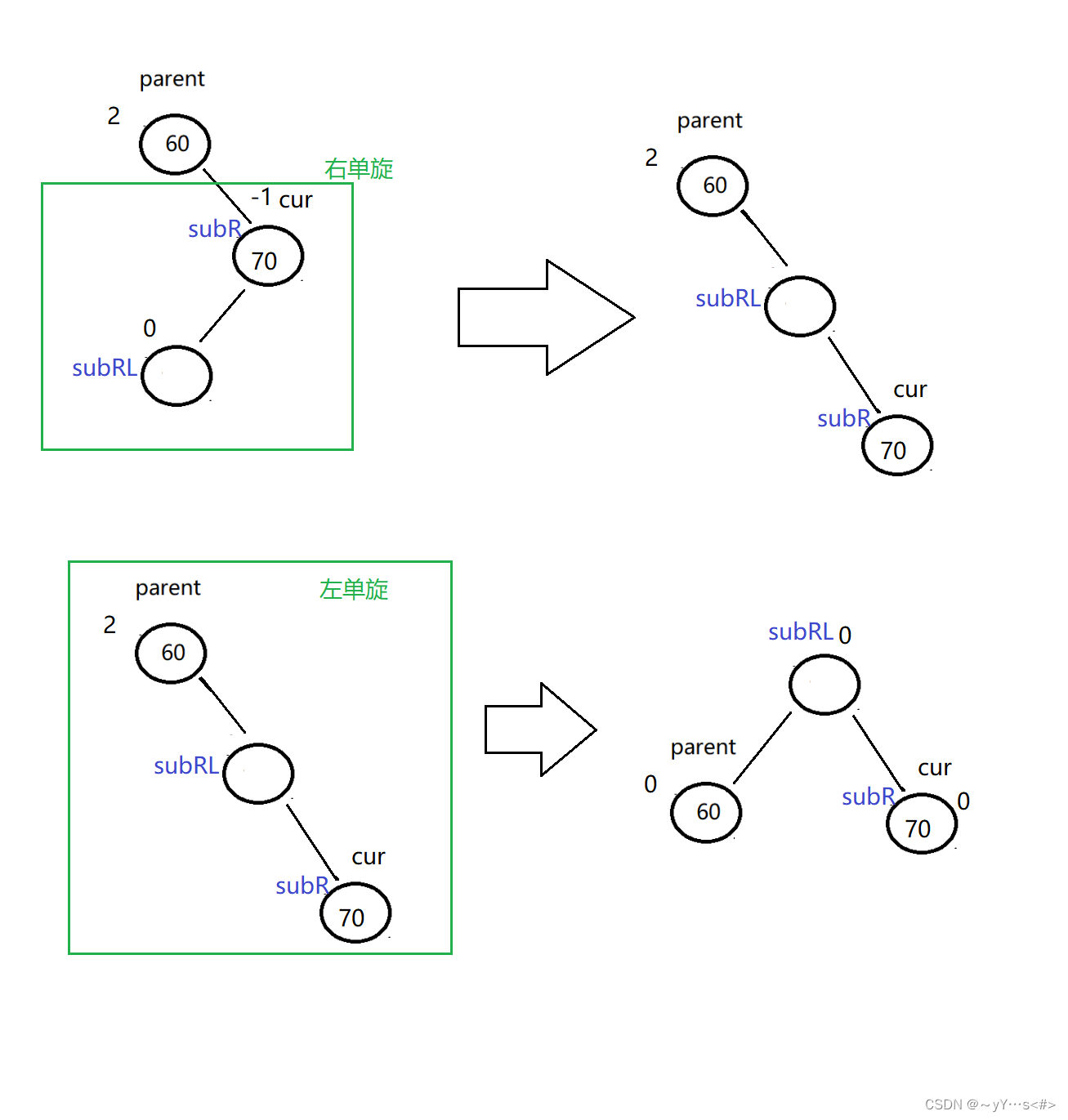
2.2.1 左单旋
整体思路:cur的左孩子变成parent的右孩子(cur的左孩子可能为空),parent变成cur的左孩子,cur连接原来parent的双亲(有可能原来的parent就是根节点,如果是,cur变成根)
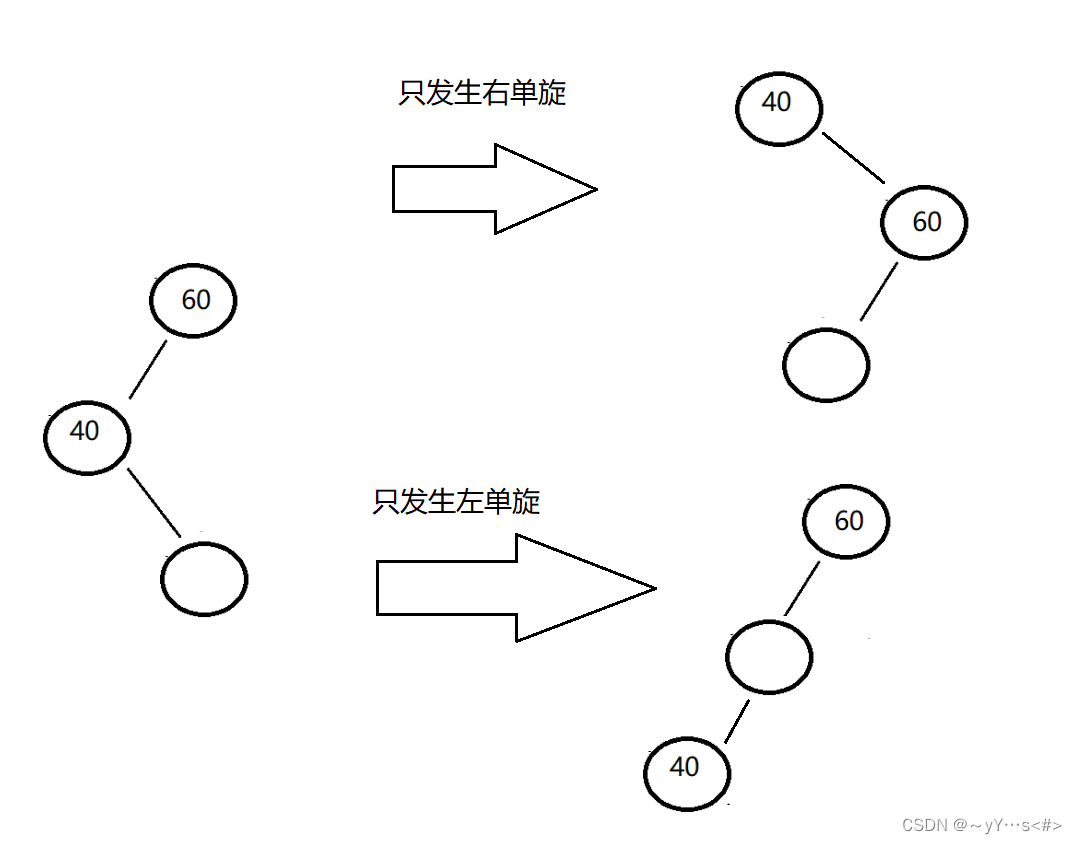
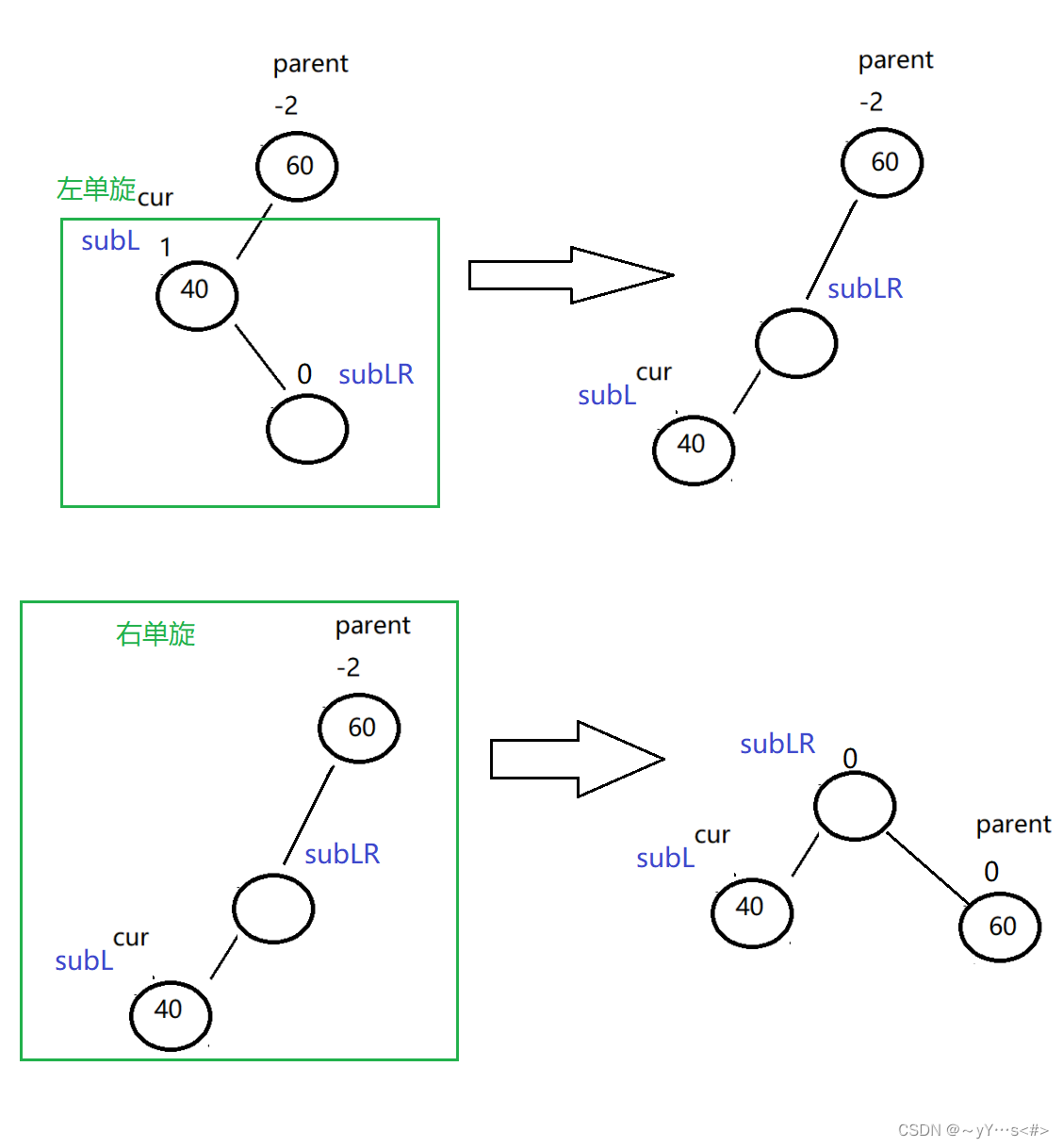
先来简单的图示分析:
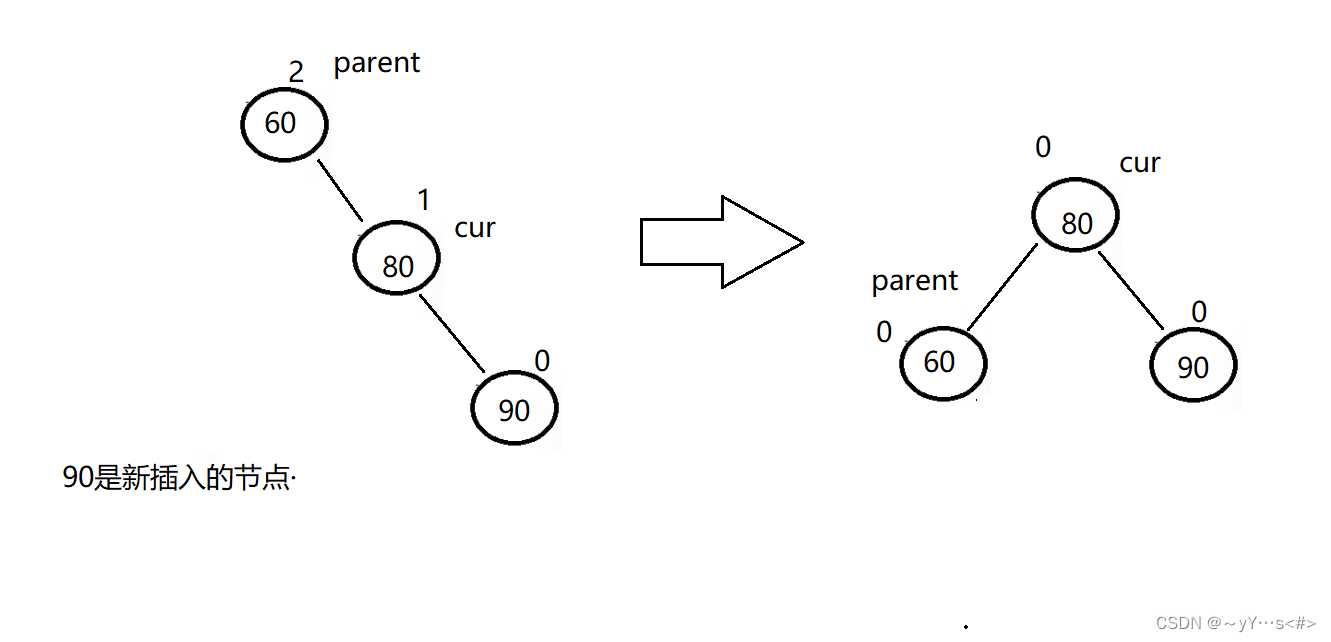
parent是平衡因子为2的节点,cur是平衡因子为1的节点,为调整成平衡,parent要变成cur的左孩子,而在此之前,cur的左孩子要先变成parent的右孩子(上面的图节点较少,所以cur没有左孩子),最终平衡。
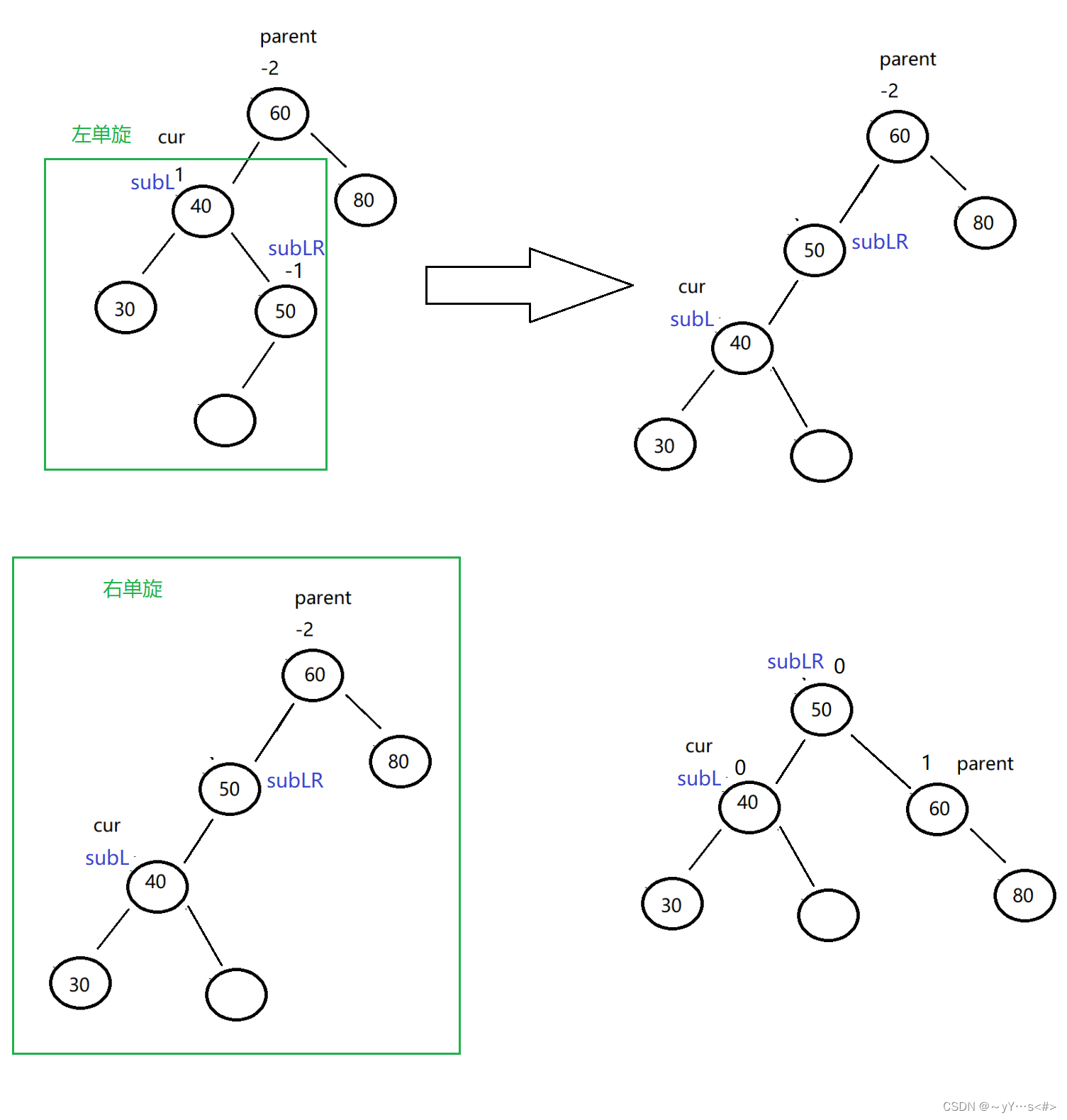
通过上面的例子,可以基本了解左单旋的整个过程,下面来较多节点的例子:
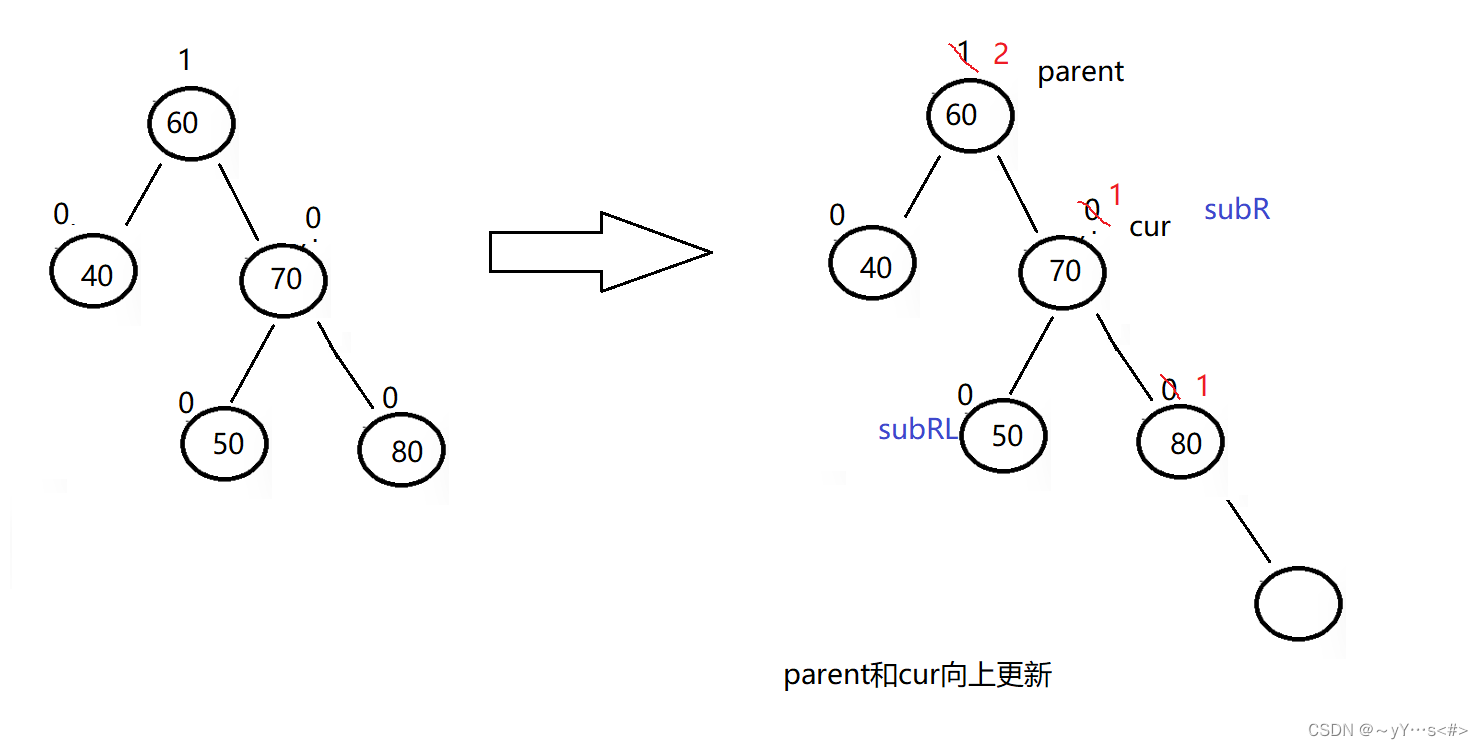
定义两个临时变量,subR指向parent的右孩子,即cur的位置(后面的操作就可以不用cur),subRL为subR的左孩子。
按照上面的步骤,subRL变成parent的右孩子,parent变成subR的左孩子,定义一个ppnode节点为原来parent的双亲,如果parent是在ppnode的左边,则ppnode的左边连接subR,;反之,则右边连接subR。如果parent原来是根节点,那么根节点就变成subR。最后修改parent和subR的平衡因子,它们的平衡因子都变成了0
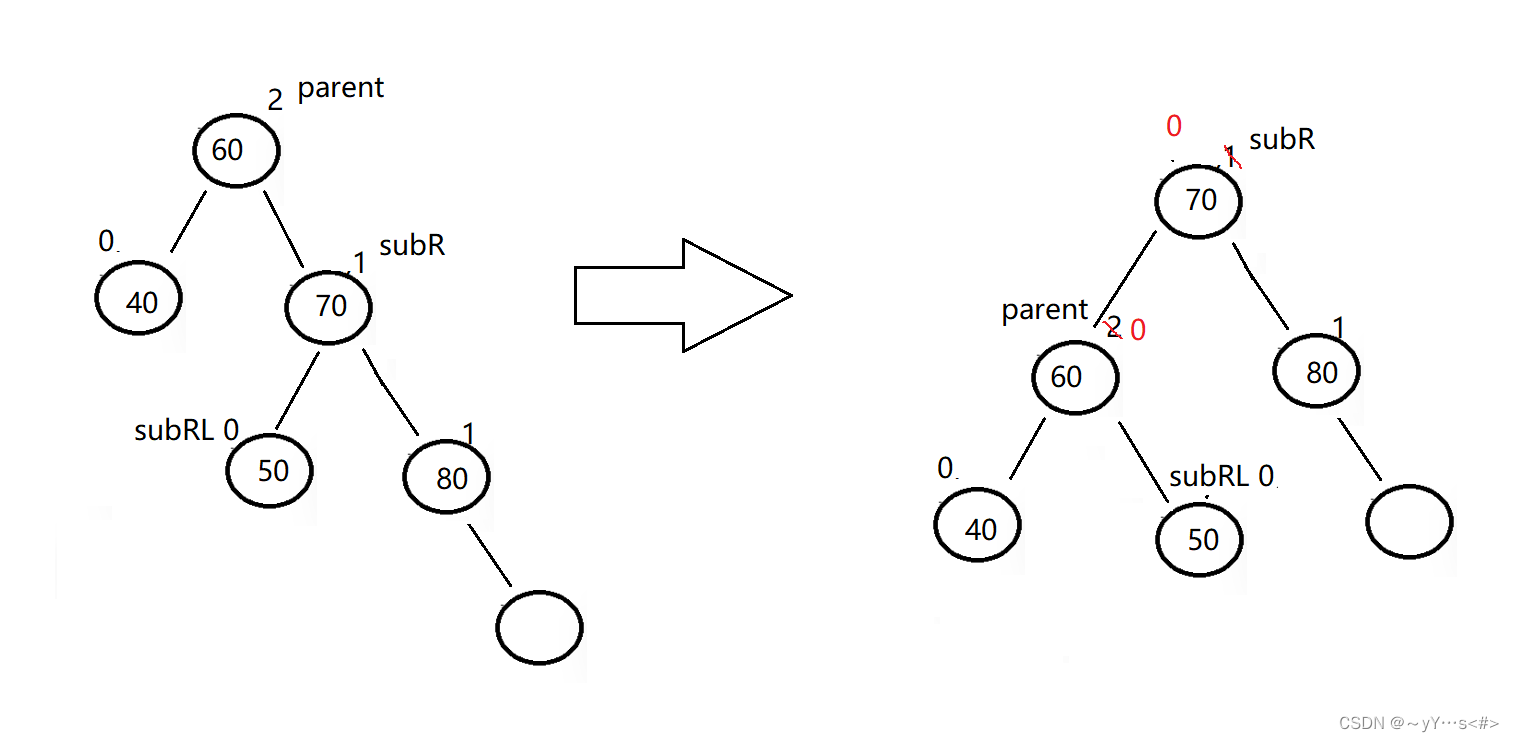
有个问题,旋转有4种情况,怎么知道用哪种呢?其实上面的两种图示已经显示出左单旋的条件。当parent的平衡因子为2,并且cur的平衡因子为1时,要进行的旋转为左单旋。
代码:
//左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
//不为空
if (subRL)
{
subRL->_parent = parent;
}
subR->_left = parent;
Node* ppnode = parent->_parent;
parent->_parent = subR;
//处理parent如果为根
if (parent == _root)
{
_root = subR;
subR->_parent = nullptr;
}
//不为根,处理与ppnode的连接
else
{
if (ppnode->_left == parent)
{
ppnode->_left = subR;
}
else
{
ppnode->_right = subR;
}
subR->_parent = ppnode;
}
//修改平衡因子
parent->_bf = 0;
subR->_bf = 0;
}
2.2.2 右单旋
整体思路:cur的右孩子变成parent的左孩子,parent变成cur的右孩子,cur连接原来parent的双亲。
简单图示:
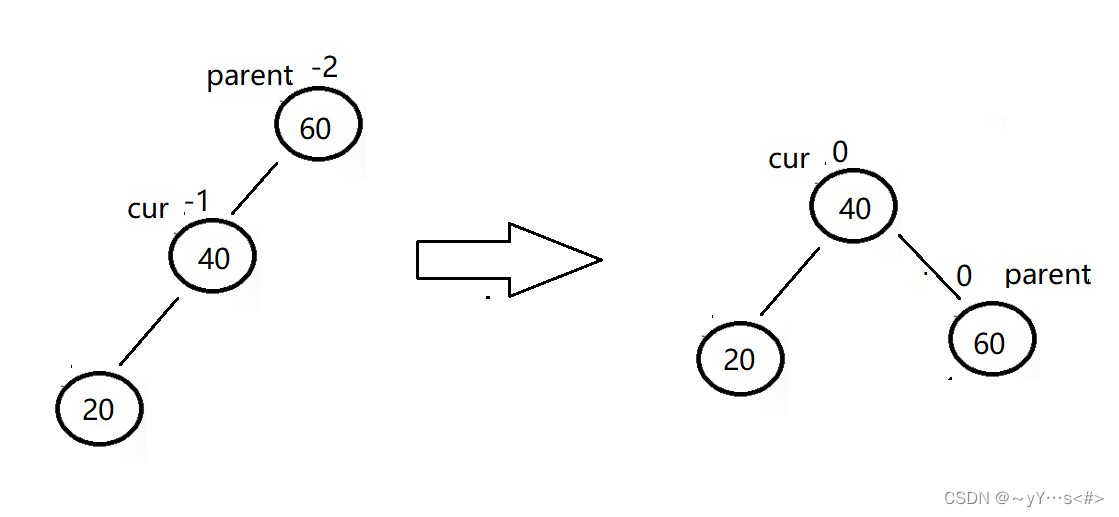
parent是平衡因子为-2的节点,cur是平衡因子为-1的节点,为调整成平衡,cur的右孩子要先变成parent的右孩子,parent变成cur的右孩子,然后修改平衡因子,最终平衡。
用较多节点的例子来分析:
定义两个临时变量,subL指向parent的左孩子,subLR指向subL的右孩子。
subLR变成parent的左孩子,parent变成subL的右孩子,定义一个ppnode节点为原来parent的双亲,步骤同左单旋。最后修改parent和subL的平衡因子,它们的平衡因子都变成了0
通过例子可知,发生右单旋的条件是parent的平衡因子为-2,cur的平衡因子为-1
代码:
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
//不为空
if (subLR)
{
subLR->_parent = parent;
}
subL->_right = parent;
Node* ppnode = parent->_parent;
parent->_parent = subL;
if (parent == _root)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppnode->_left == parent)
{
ppnode->_left = subL;
}
else
{
ppnode->_right = subL;
}
subL->_parent = ppnode;
}
//修改平衡因子
parent->_bf = 0;
subL->_bf = 0;
}
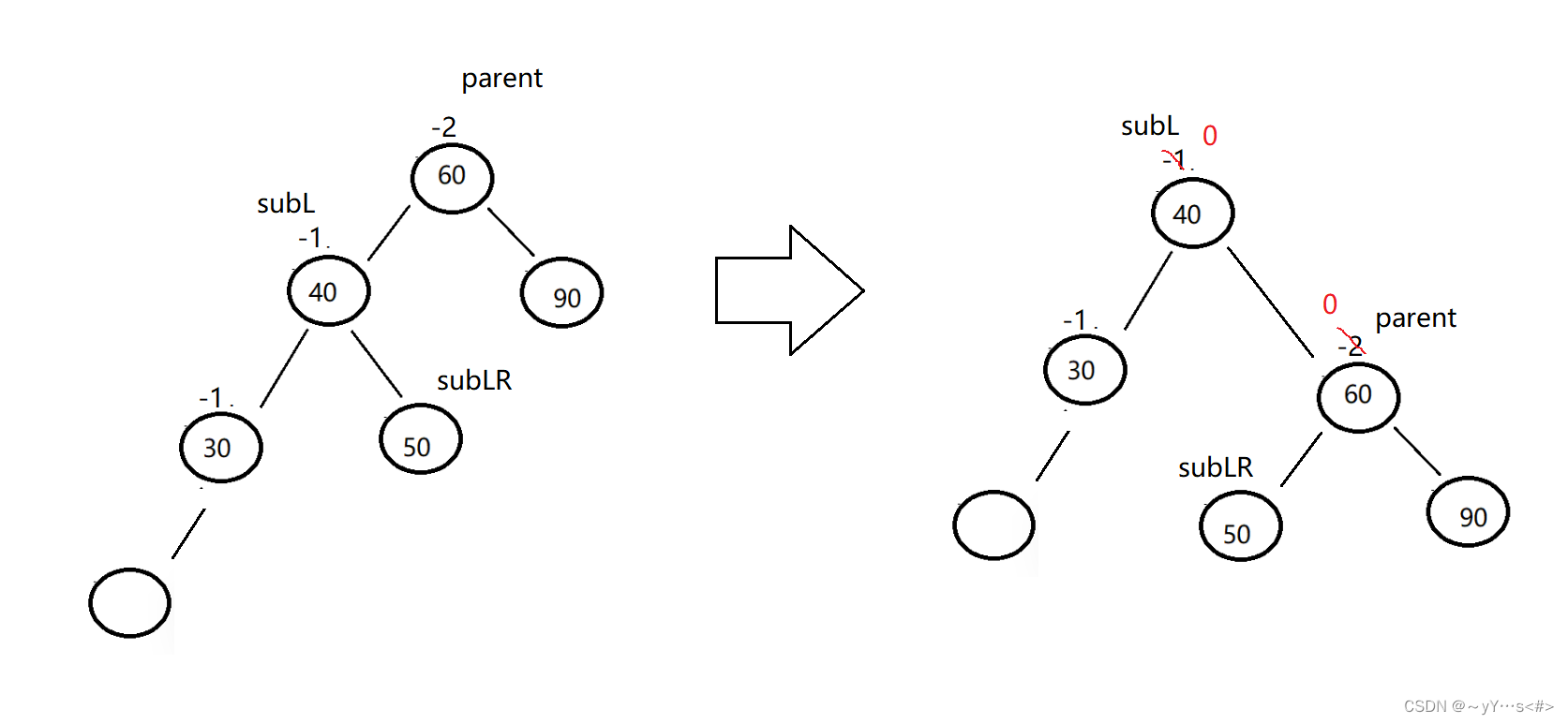
2.2.3 左右双旋
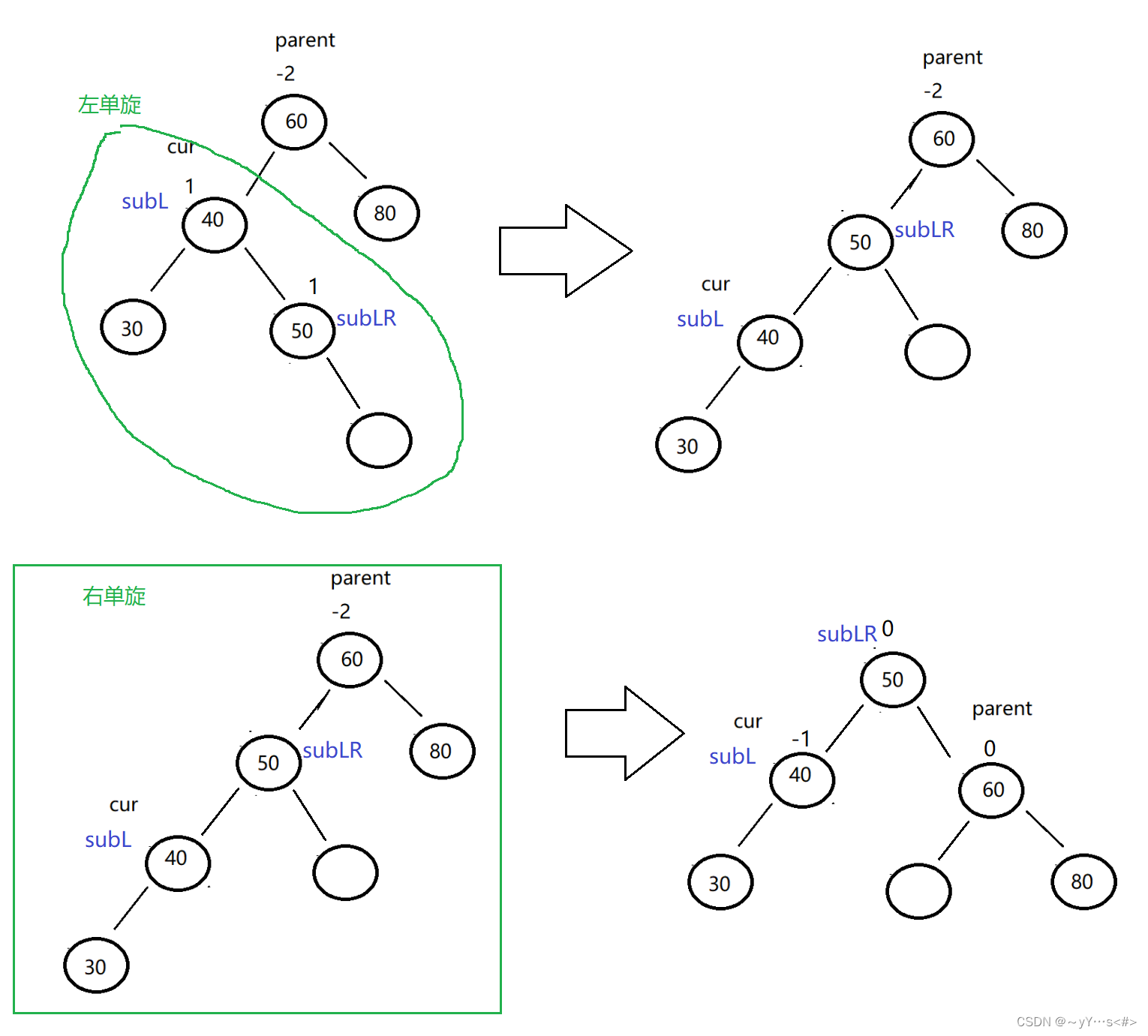
左右双旋是先左单旋,再右单旋。左单旋的是parent的左子树,右单旋的是包括parent的当前树。既然已经有单旋了,为什么还要双旋呢?如图:
通过上面例子可知,如果插入的位置与前面(左单旋或者右单旋插入时的位置)不同,只有左或者右旋转不能使树变平衡,因此要进行双旋。
左右双旋的情况主要分为以下3类:
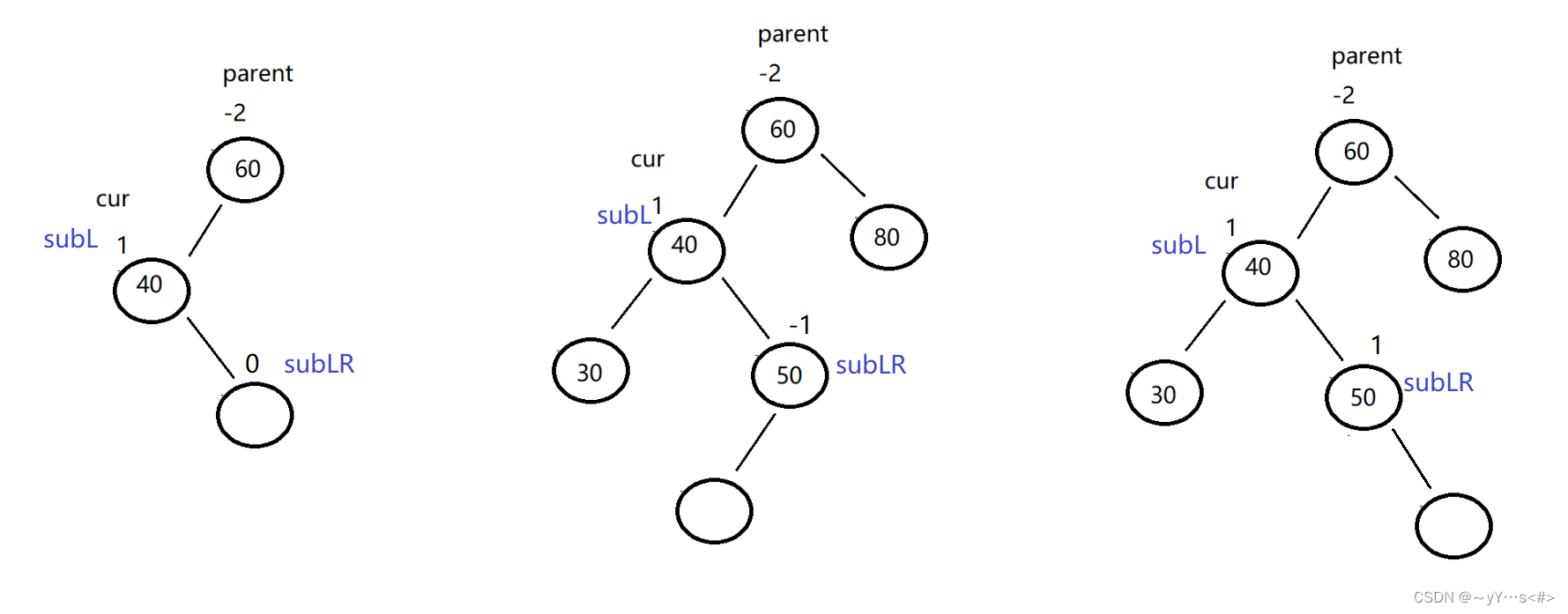
当插入的节点是subLR时,subLR的平衡因子为0;插入的节点在subLR的左边,subLR的平衡因子为-1,插入的节点在subLR的右边,subLR的平衡因子为1;通过图示可知,发生左右双旋的条件是parent的平衡因子为-2,cur的平衡因子为1。这3种情况经过左右双旋后,subLR的平衡因子都变成0,但是parent和subL的平衡因子是有区别的。
下面来看看3种情况的旋转:
1️⃣插入的新节点是subLR
2️⃣插入的新节点在subLR的左边
3️⃣插入的新节点在subLR的右边
通过上面的图发现,当插入的新节点是subLR,subLR的平衡因子为0,旋转后,subL和parent的平衡因子也为0;插入的新节点在subLR的左边,subLR的平衡因子为-1,旋转后,subL的平衡因子为0,parent的平衡因子为1;插入的新节点在subLR的右边,subLR的平衡因子为1,旋转后,subL的平衡因子为-1,parent的平衡因子为0。
代码:
//左右双旋-先左后右
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;//提前保存原来的bf
RotateL(subL);
RotateR(parent);
//旋转后,不同情况最后的bf会不一样
subLR->_bf = 0;//确定的
if (bf == -1)
{
subL->_bf = 0;
parent->_bf = 1;
}
else if (bf == 1)
{
subL->_bf = -1;
parent->_bf = 0;
}
else if (bf == 0)
{
subL->_bf = 0;
parent->_bf = 0;
}
else
{
assert(false);
}
}
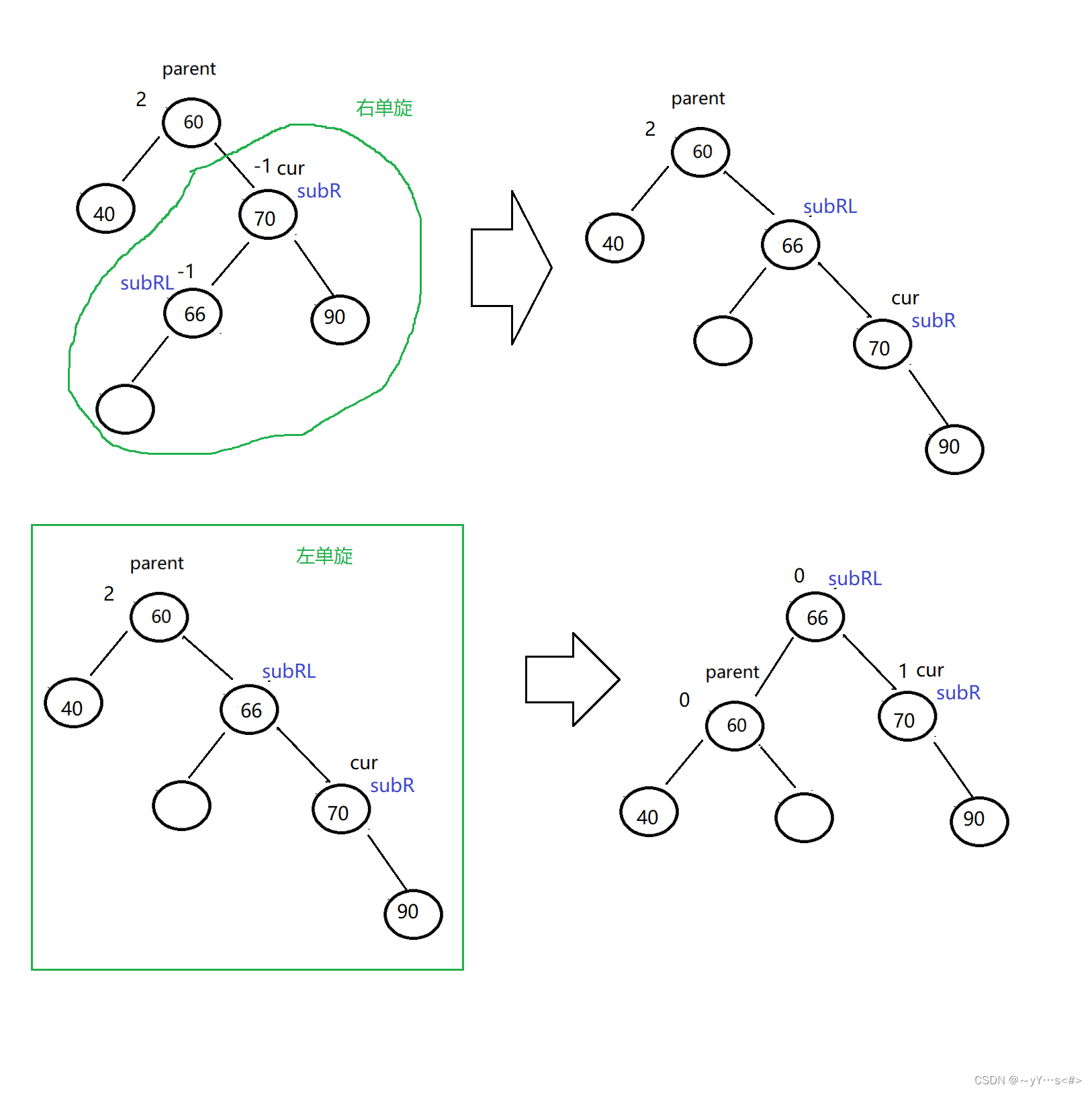
2.2.4 右左双旋
右左双旋是先右单旋,再左单旋。右单旋的是parent的右子树,左单旋的是包括parent的当前树。
右左双旋也分为3类:
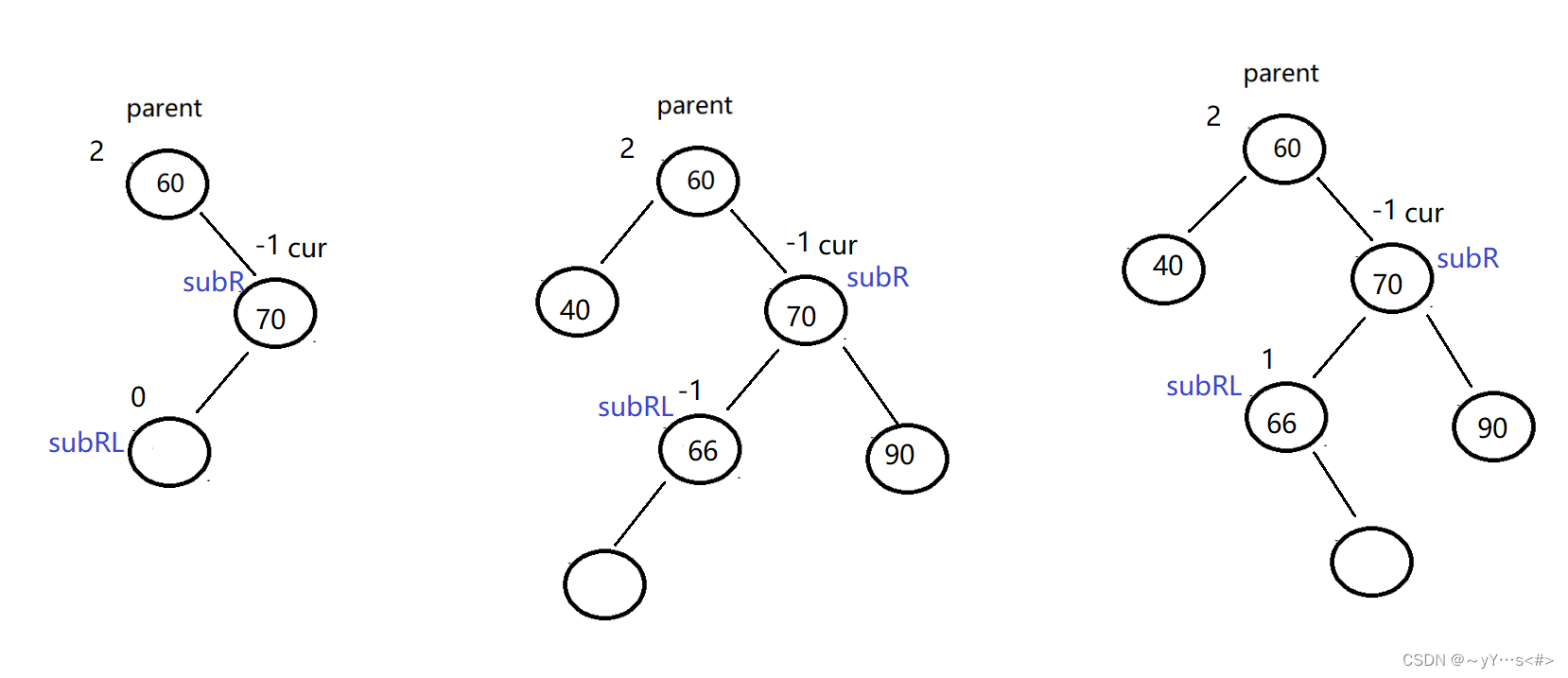
当插入的节点是subRL时,subRL的平衡因子为0;插入的节点在subRL的左边,subRL的平衡因子为-1;插入的节点在subRL的右边,subRL的平衡因子为1;通过图示可知,发生右左双旋的条件是parent的平衡因子为2,cur的平衡因子为-1。这3种情况经过右左双旋后,subRL的平衡因子固定都变成了0,但是parent和subL的平衡因子有区别。
下面是3种情况的旋转:
1️⃣插入的新节点是subRL
2️⃣插入的新节点在subRL的左边
3️⃣插入的新节点在subRL的右边
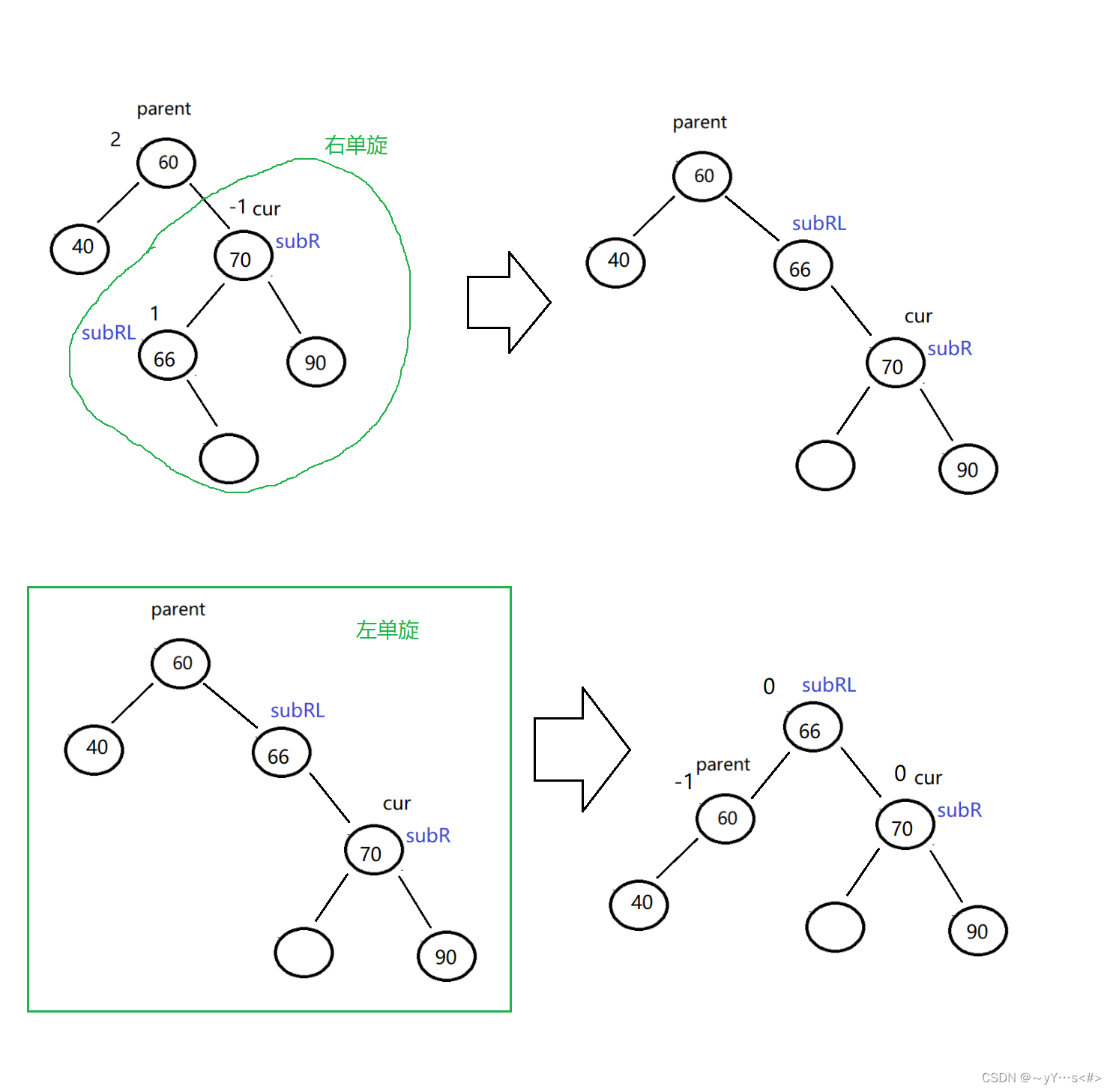
插入的新节点是subRL,subRL的平衡因子为0,旋转后,subR和parent的平衡因子也为0;插入的新节点在subRL的左边,subRL的平衡因子为-1,旋转后,subR的平衡因子为1,parent的平衡因子为0;插入的新节点在subRL的右边,subRL的平衡因子为1,旋转后,subR的平衡因子为0,parent的平衡因子为-1。
代码:
//右左双旋-先右后左
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(parent);
subRL->_bf = 0;
if (bf == -1)
{
subR->_bf = 1;
parent->_bf = 0;
}
else if (bf == 1)
{
subR->_bf = 0;
parent->_bf = -1;
}
else if (bf == 0)
{
subR->_bf = 0;
parent->_bf = 0;
}
else
{
assert(false);
}
}






![[蓝桥杯 2020 省 B2] 平面切分](https://img-blog.csdnimg.cn/direct/6da0e7ec4a044441b46ae6e7a9d76583.png)



![基于JavaWeb开发的springboot网咖管理系统[附源码]](https://img-blog.csdnimg.cn/direct/c102749a5c56420d98647cf8041dfb54.png)

