1、设备准备
1.1 硬件设备
1)TI IWR 6843 ISK 1块
2)Micro USB 数据线 1条
1.2 系统环境
1)VMware Workstation 15 Player 虚拟机
2)Ubuntu18.04 并安装有 ROS1 系统
如若没有安装 ROS 系统,可通过如下指令进行一键安装 ROS 系统,安装过程中一直选择“1”便可安装 Ubuntu 18.04 对应用的 melodic ROS 系统。使用一键安装可以省去很多的时间来安装 ROS系统。
wget http://fishros.com/install -O fishros && . fishros2、准备工作
2.1 添加用户权限
您的用户帐户必须是“dialout”unix 组的成员,才能访问 Linux 上的串行端口。要检查您是否是此组的成员,请运行“groups”命令。如果您已经是“dialout”组的成员,则输出应列出“dialout”(以及其他组)。如果您不是“dialout”组的成员,请运行以下命令将您的用户帐户添加到该组。
# <your_username>:这里替换为自己的Ubuntu系统的用户名系统即可,我的是ubuntu18
sudo adduser <your_username> dialout
然后再重启 Ubuntu18.04 系统以生效刚刚的这一步操作。
2.2 构建 TI 毫米波 ROS1 驱动
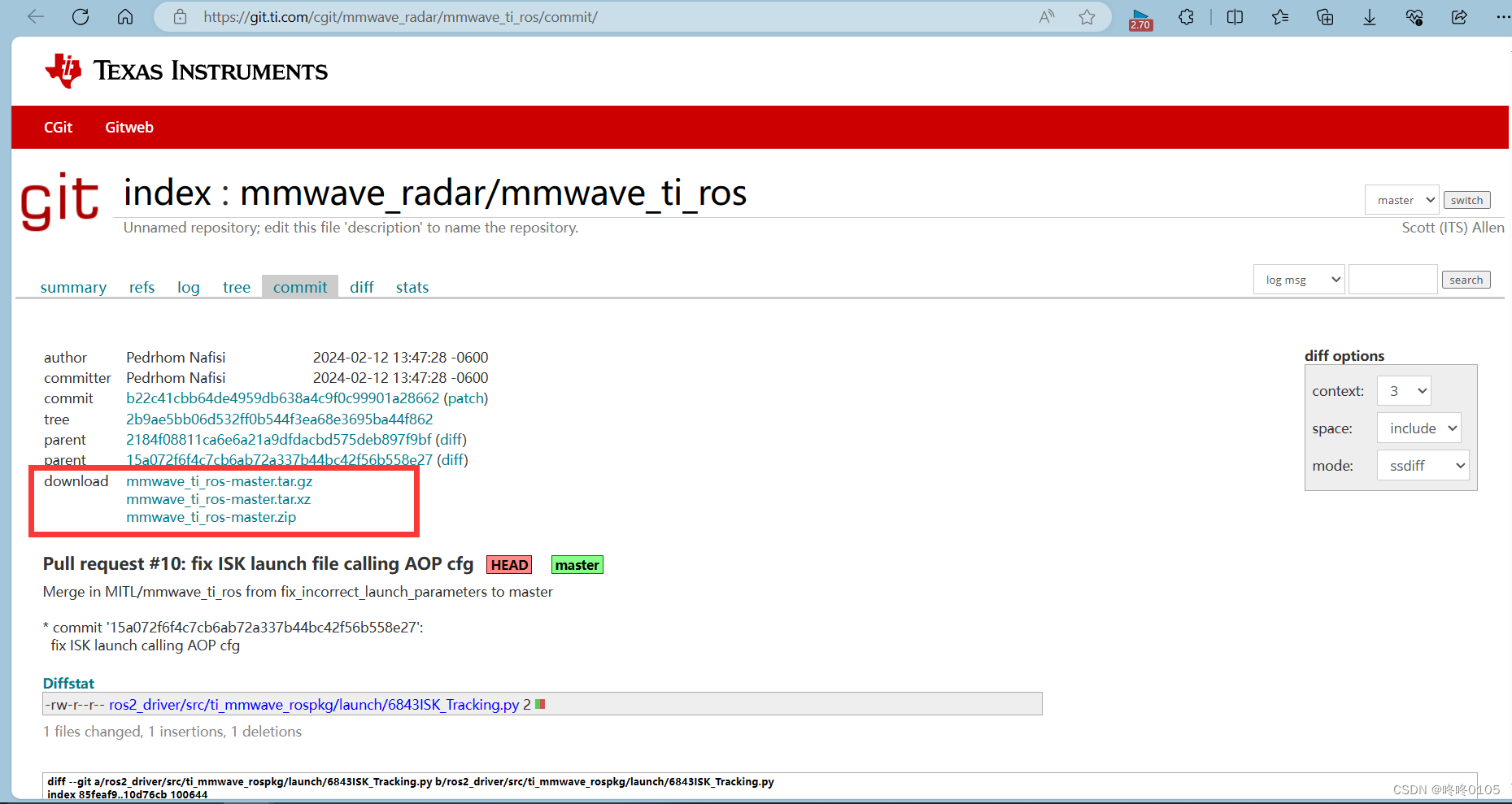
1)从TI官网下载驱动程序,链接如下:
https://git.ti.com/cgit/mmwave_radar/mmwave_ti_ros/commit/下图中框选的即为TI官方提供的ROS驱动程序,点击对应的格式下载即可,我这里下载的是“mmwave_ti_ros-master.zip”文件。
在 Ubuntu 系统中解压“mmwave_ti_ros-master.zip”文件只需要使用鼠标选中右击点击“解压到此处”,即可将此压缩包解压出来。
2)TI 毫米波雷达 ROS 驱动构建
# 在解压的 mmwave_ti_ros 文件夹下,我解压在主目录中
# 进入ros1_driver文件下
cd mmwave_ti_ros/ros1_driver/
# 编译程序
catkin_make
3)添加 source 路径
# 在 .bashrc 文件中添加所编的 mmwave_ti_ros的路径
# 使用如下指令打开 .bashrc 文件
gedit .bashrc然后在 .bashrc 文件中添加自己的 mmwave_ti_ros的路径,这样就避免每次启动终端都需source的指令,我的路径为/home/ubuntu18/mmwave_ti_ros/ros1_driver/devel/setup.bash
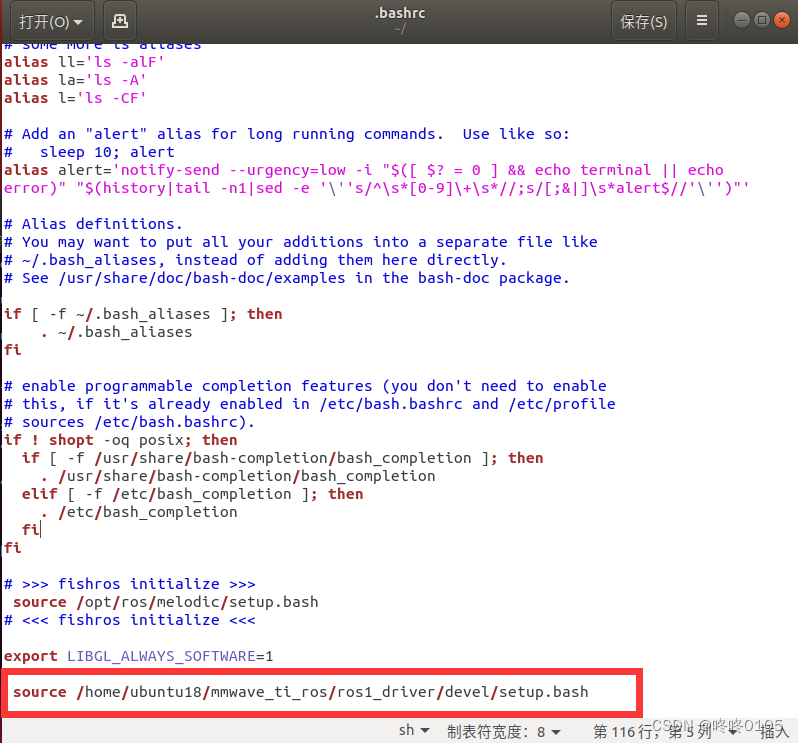
按照图中所示的方式添加source路径即可。
3)将 IWR6843ISK 毫米波雷达板子接入电脑,选择接入到Ubuntu18.04系统中,然后使用如下指令查看接入的 IWR6843ISK 毫米波雷达板子的接口号
ll /dev/serial/by-id
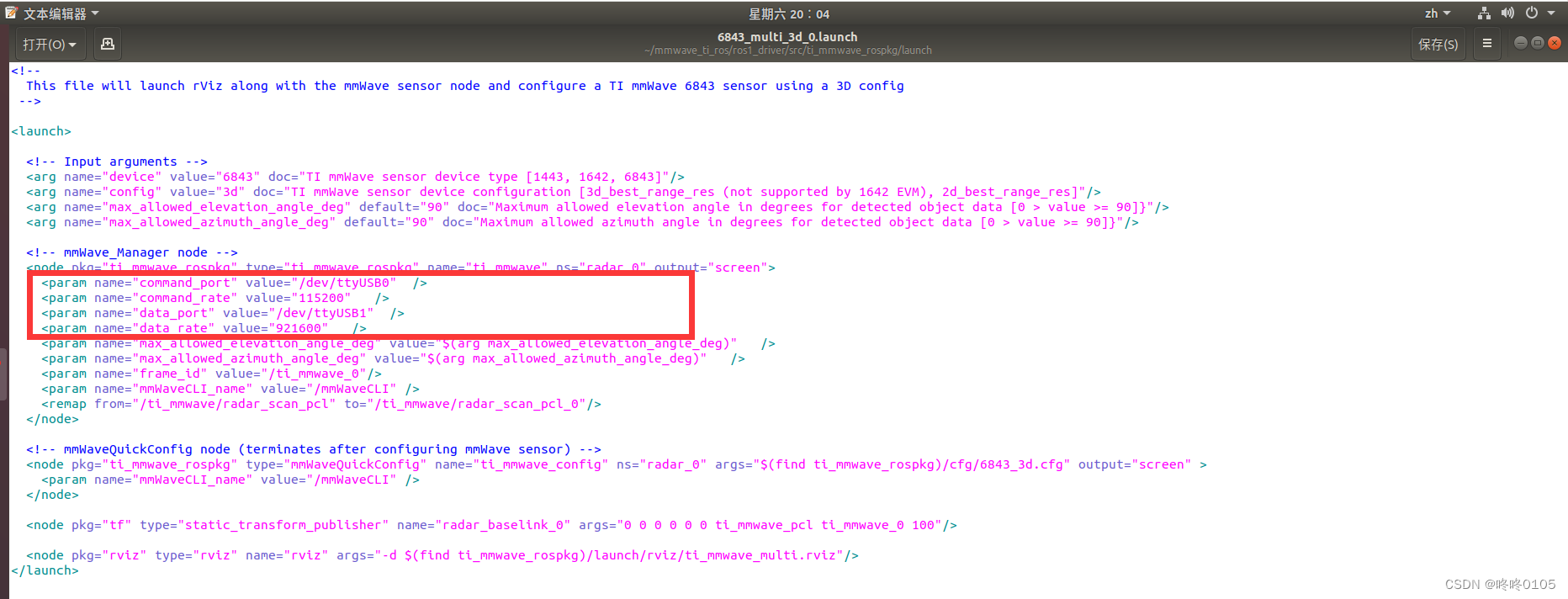
可在上图中看到的我的接口号为“../../ttyUSB0”和“../../ttyUSB1”,然后在/home/ubuntu18/mmwave_ti_ros/ros1_driver/src/ti_mmwave_rospkg/launch中找到IWR6843ISK对应的launch文件打开将其接口号修改为所查询出来的接口号,我这里修改的launch文件是6843_mulit_3d_0.launch文件,其他的文件也是类似的修改方式。修改完成后保存并关闭此launch文件。
3、启动 launch 验证是否成功
运行上述所修改的 launch 文件,也可以启动其他的文件,只需要将其接口更改为自己的板子对应的接口即可。
打开一个新终端运行以下指令,即可在所打开的 RVIZ 中看到 IWR6843ISK 毫米波雷达板子所产生的点云数据。
roslaunch ti_mmwave_rospkg 6843_multi_3d_0.launch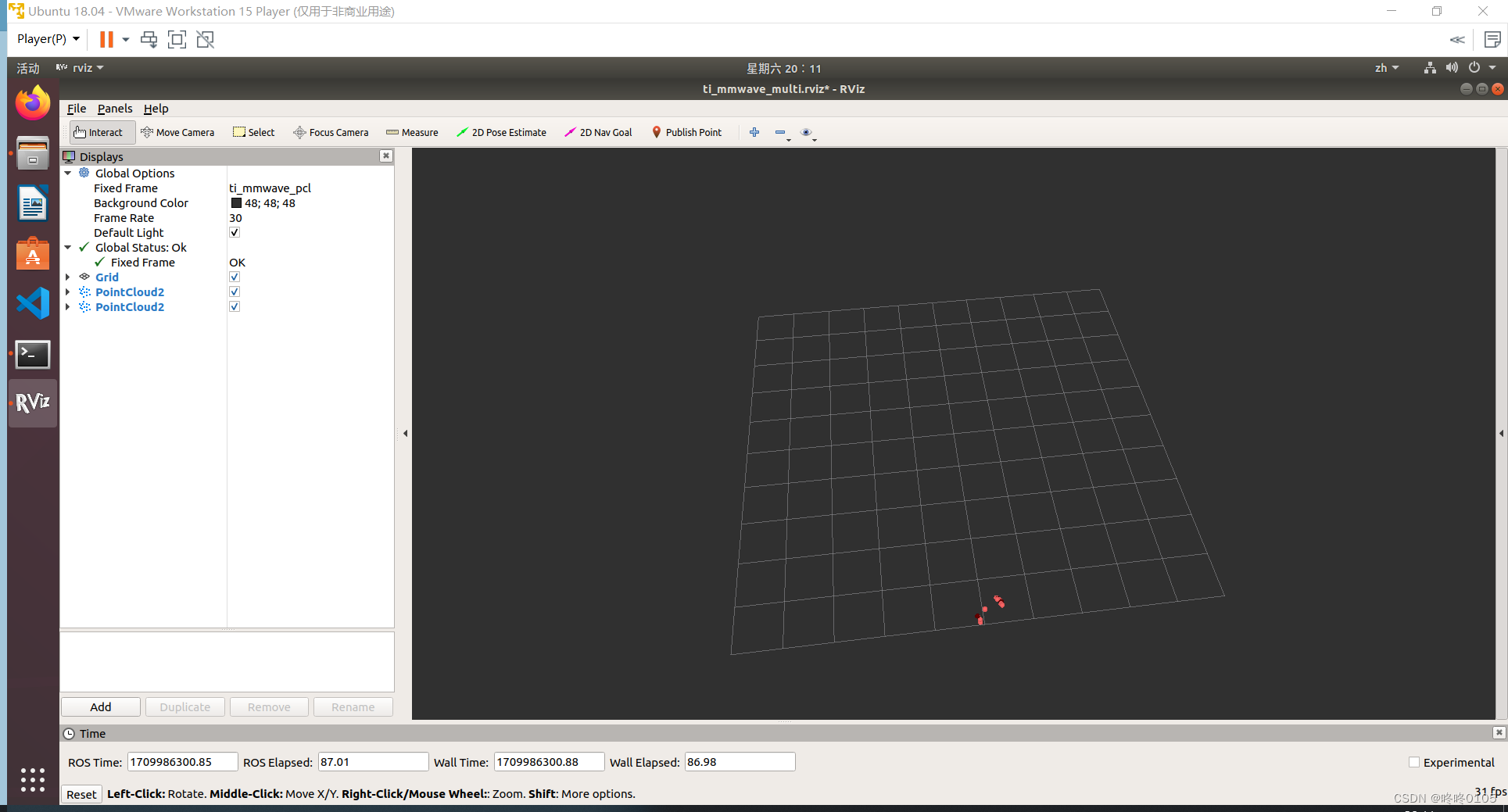
至此,这说明所安装的 TI 的毫米波雷达板子驱动程序安装成功。
参考链接:
小鱼的一键安装系列 | 鱼香ROS
https://dev.ti.com/tirex/explore/node?node=A__ANSECEN8pUpQyDw4PbR9XQ__radar_toolbox__1AslXXD__LATEST


![PermissionError: [Errno 13] Permission denied: ‘xview/xView_train.geojson‘](https://img-blog.csdnimg.cn/direct/7397ee999eca44bd9ff30db4e8aa76d1.png)





![docker ENTRYPOINT [“sh“,“-c“,“java“,“-jar“,“Hello.jar“] 启动失败问题分析](https://img-blog.csdnimg.cn/direct/5a78147afc9a46f7b3ddb5fabeb33b20.png)