#include <stdio.h>
#define MAX_N 1003
int a[MAX_N][MAX_N], d[MAX_N][MAX_N];
// 差分数组的初始化
void init_diff(int n, int m) {
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= m; ++j) {
d[i][j] = a[i][j] - a[i-1][j] - a[i][j-1] + a[i-1][j-1];
}
}
}
// 对差分数组进行区间更新
void update_diff(int x1, int y1, int x2, int y2, int c) {
d[x1][y1] += c;
d[x1][y2+1] -= c;
d[x2+1][y1] -= c;
d[x2+1][y2+1] += c;
}
int main() {
int n, m, q;
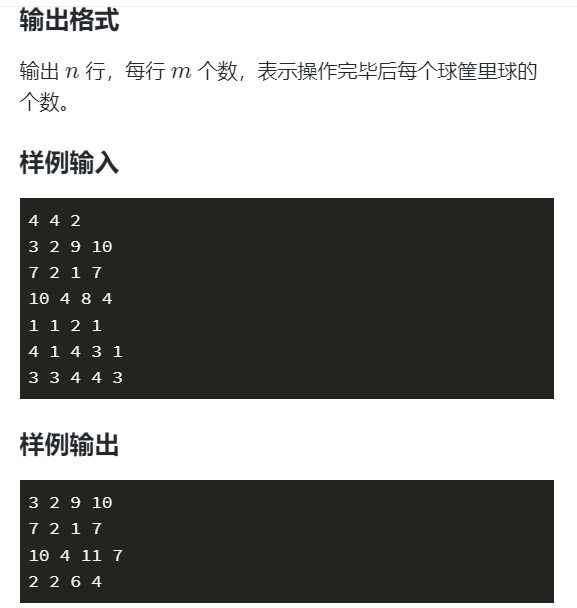
scanf("%d %d %d", &n, &m, &q);
// 输入初始的球筐矩阵
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= m; ++j) {
scanf("%d", &a[i][j]);
}
}
// 初始化差分数组
init_diff(n, m);
// 处理每次操作
while (q--) {
int x1, y1, x2, y2, c;
scanf("%d %d %d %d %d", &x1, &y1, &x2, &y2, &c);
update_diff(x1, y1, x2, y2, c);
}
// 通过差分数组还原最终的球筐矩阵
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= m; ++j) {
// 累加从(1,1)到(i,j)的差分和来还原a[i][j]
d[i][j] += d[i-1][j] + d[i][j-1] - d[i-1][j-1];
printf("%d ", d[i][j]);
}
printf("\n");
}
return 0;
}
-
定义全局二维数组
a和d,其中a用于存储原始矩阵,d用于存储差分矩阵。 -
init_diff函数初始化差分数组d。对于差分数组中的每个元素d[i][j],它存储了原始矩阵a中元素a[i][j]相对于其左上角元素a[i-1][j-1]的差值的累计。这是通过计算a[i][j]、a[i-1][j]、a[i][j-1]和a[i-1][j-1]之间的差值来完成的。 -
update_diff函数实现了差分数组的区间更新。它接收左上角坐标(x1,y1)和右下角坐标(x2,y2),以及更新值c。该函数通过在差分数组的特定点上增加c以及在需要减少的点上减少c来更新区间。 -
主函数
main首先读取矩阵大小n x m和操作数量q。 -
读取初始球筐矩阵,并利用
init_diff函数初始化差分数组。 -
读取并执行
q次操作更新,每次更新都调用update_diff函数。 -
更新完成后,使用差分数组
d通过累加前缀和来还原最终的球筐矩阵a。 -
最后,输出最终更新后的球筐矩阵。
这段代码使用了一种称为“差分”的技术,可以在 O(q + n * m) 的时间复杂度内完成所有更新和最终的输出,这对于大规模更新来说非常高效。在更新操作过程中,并不直接修改原始矩阵,而是通过差分矩阵间接记录每个区间增量的变化,然后在最后一步通过累加差分矩阵来重构原始矩阵。这种方法避免了对每个元素逐一更新带来的高时间复杂度。


![[Python] 什么是PCA降维技术以及scikit-learn中PCA类使用案例(图文教程,含详细代码)](https://img-blog.csdnimg.cn/direct/5d45067f8b63410a85d61f3c55a0c661.png)