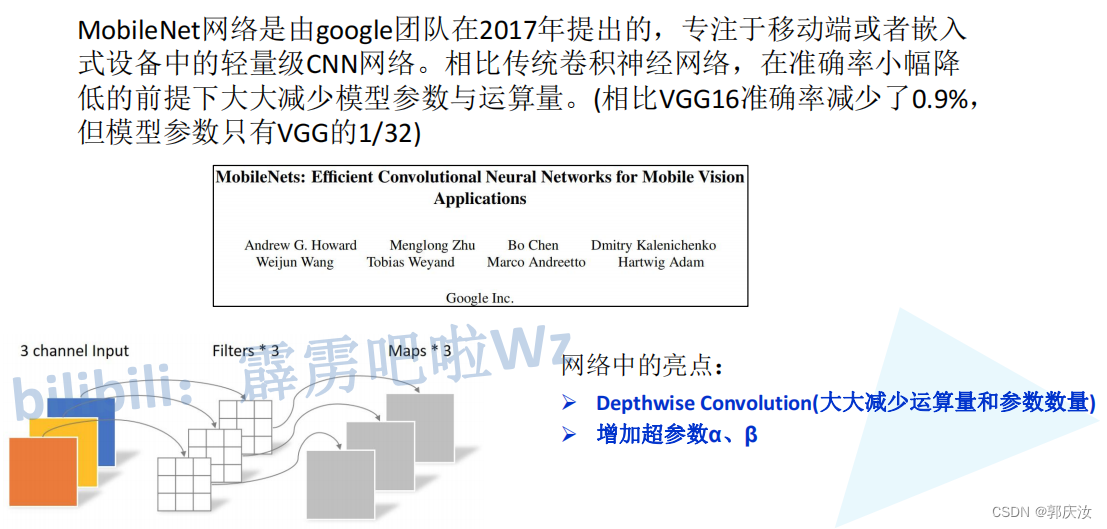
深度学习网络模型 MobileNet系列MobileNet V1、MobileNet V2、MobileNet V3网络详解以及pytorch代码复现
- 1、DW卷积与普通卷积计算量对比
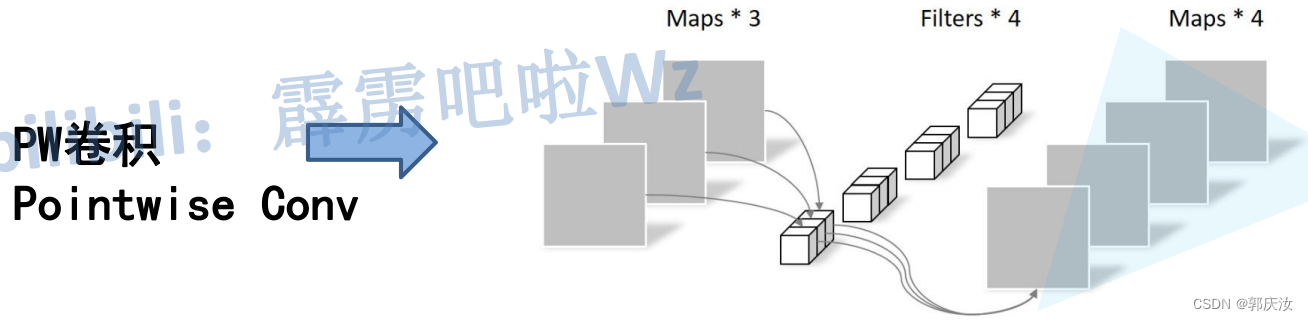
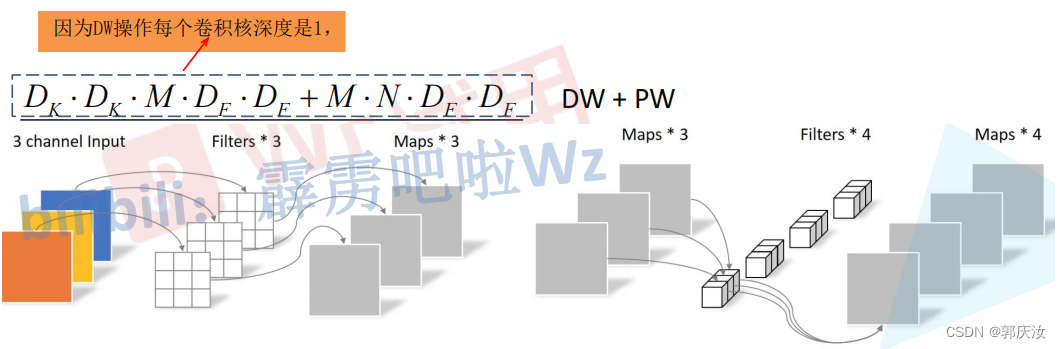
- DW与PW计算量
- 普通卷积计算量
- 计算量对比
- 2、MobileNet V1
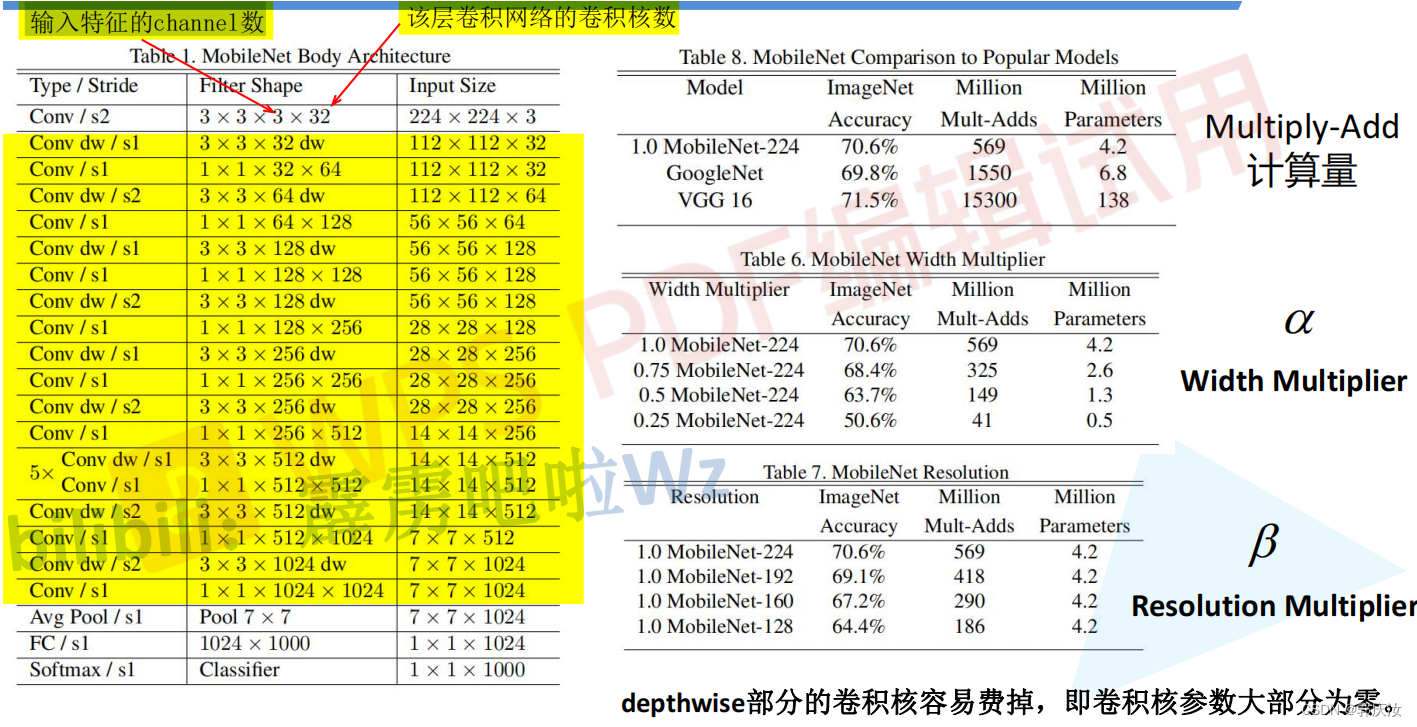
- MobileNet V1网络结构
- MobileNet V1网络结构代码
- 3、MobileNet V2
- 倒残差结构模块
- 倒残差模块代码
- MobileNet V2详细网络结构
- MobileNet V2网络结构代码
- 4、MobileNet V3
- 创新点
- MobileNet V3详细网络结构
- 注意力机制SE模块代码
- InvertedResidual模块代码
- 整体代码
- pytorch代码复现MobileNet V1~V2
- 项目目录
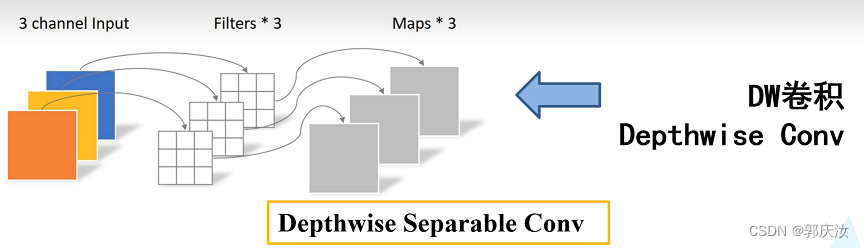
1、DW卷积与普通卷积计算量对比
DW与PW计算量
普通卷积计算量
计算量对比
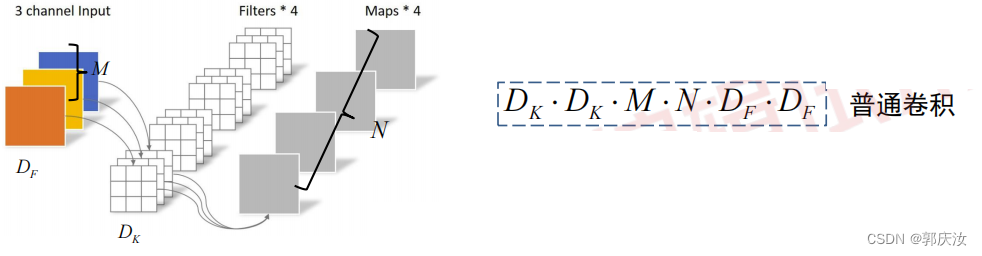

因此理论上普通卷积是DW+PW卷积的8到9倍
2、MobileNet V1
MobileNet V1网络结构
MobileNet V1网络结构代码
import torch.nn as nn
import torch
class MobileNetV1(nn.Module):
def __init__(self, ch_in, n_classes):
super(MobileNetV1, self).__init__()
# 定义普通卷积、BN、激活模块
def conv_bn(inp, oup, stride):
return nn.Sequential(
nn.Conv2d(inp, oup, 3, stride, 1, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU(inplace=True)
)
# 定义DW、PW卷积模块
def conv_dw(inp, oup, stride):
return nn.Sequential(
# dw
nn.Conv2d(inp, inp, 3, stride, 1, groups=inp, bias=False), # DW卷积的卷积核输入与输出的数量一致,且等于分组数
nn.BatchNorm2d(inp),
nn.ReLU(inplace=True),
# pw
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU(inplace=True),
)
self.model = nn.Sequential(
conv_bn(ch_in, 32, 2),
conv_dw(32, 64, 1),
conv_dw(64, 128, 2),
conv_dw(128, 128, 1),
conv_dw(128, 256, 2),
conv_dw(256, 256, 1),
conv_dw(256, 512, 2),
conv_dw(512, 512, 1),
conv_dw(512, 512, 1),
conv_dw(512, 512, 1),
conv_dw(512, 512, 1),
conv_dw(512, 512, 1),
conv_dw(512, 1024, 2),
conv_dw(1024, 1024, 1),
nn.AdaptiveAvgPool2d(1)
)
self.fc = nn.Linear(1024, n_classes)
def forward(self, x):
x = self.model(x)
x = x.view(-1, 1024)
x = self.fc(x)
return x
if __name__=='__main__':
# model check
model = MobileNetV1(ch_in=3, n_classes=5)
print(model)
random_data=torch.rand([1,3,224,224])
result = model(random_data)
print(result)
3、MobileNet V2
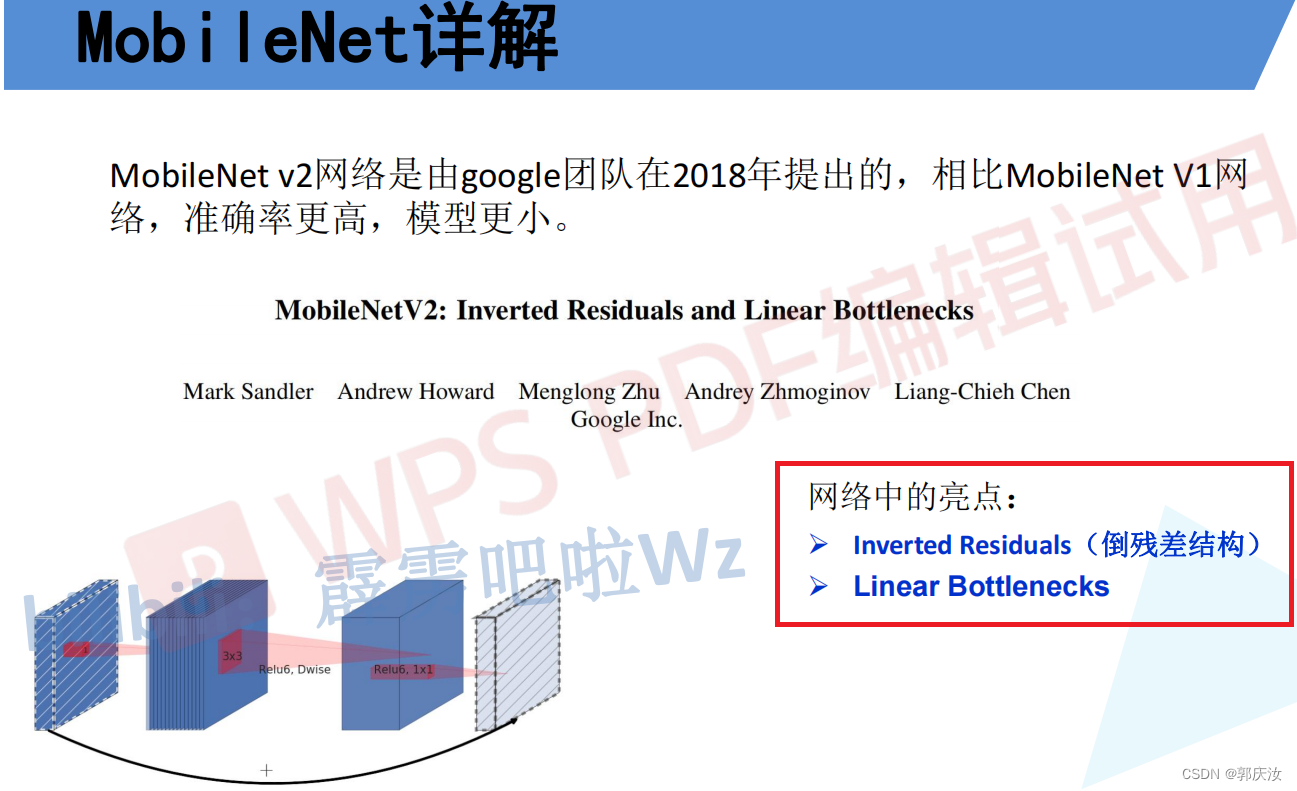
倒残差结构模块
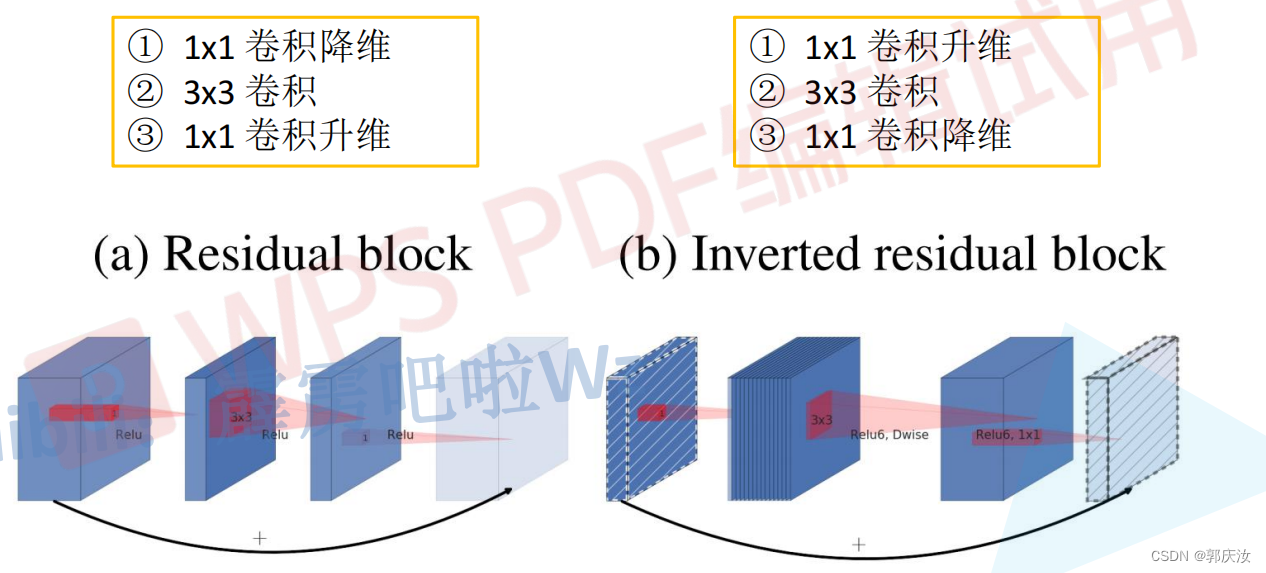
Residual blok与Inverted residual block对比:
- Residual blok:先采用1 x 1的卷积核来对特征矩阵进行压缩,减少输入特征矩阵的channel,再通过3 x 3的卷积核进行特征处理,再采用1 x 1的卷积核来扩充channel维度,形成了两头大中间小的瓶颈结构。并且3 x 3的卷积后面采用Relu激活函数。
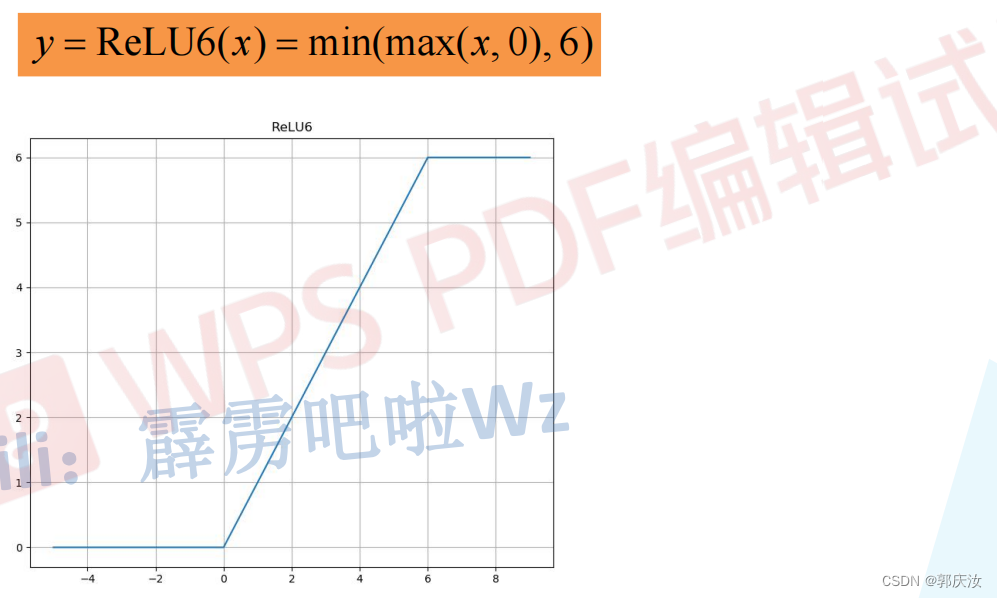
- Inverted residual block:先采用1 x 1的卷积核进行升高channel维度的操作,通过卷积核大小为3 x 3的DW模块进行卷积,再通过1 x 1的卷积进行降低channel维度的处理,形成两头小中间大的结构。并且3 x 3的卷积后面采用Relu6激活函数。
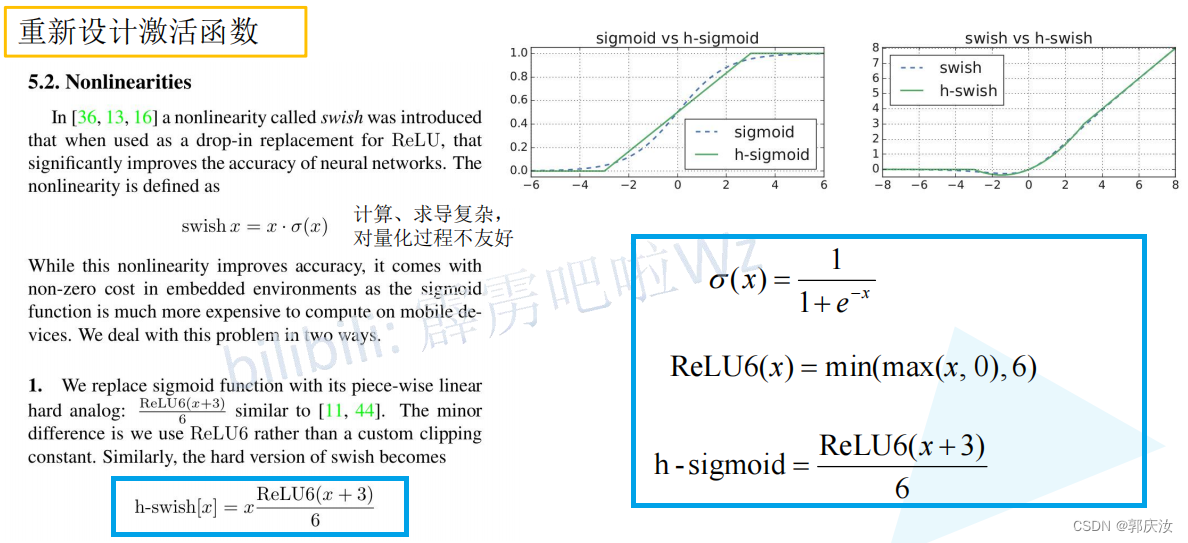
- Relu6激活函数
- 倒残差结构详细示意图
倒残差模块代码
# 定义普通卷积、BN结构
class ConvBNReLU(nn.Sequential):
def __init__(self, in_channel, out_channel, kernel_size=3, stride=1, groups=1):
padding = (kernel_size - 1) // 2 # padding的设置根据kernel_size来定,如果kernel_size为3,则padding设置为1;如果kernel_size为1,为padding为0
super(ConvBNReLU, self).__init__(
# 在pytorch中,如果设置的 group=1的话,就为普通卷积;如果设置的值为输入特征矩阵的深度的话(即in_channel),则为深度卷积(deptwise conv),并且Dw卷积的输出特征矩阵的深度等于输入特征矩阵的深度
nn.Conv2d(in_channel, out_channel, kernel_size, stride, padding, groups=groups, bias=False), # groups=1,表示普通的卷积;因为接下来要使用的是BN层,此处的偏置不起任何作用,所以设置为1
nn.BatchNorm2d(out_channel),
nn.ReLU6(inplace=True) # 此处使用的是Relu6激活函数
)
# 定义mobile网络基本结构--即到残差结构
class InvertedResidual(nn.Module):
def __init__(self, in_channel, out_channel, stride, expand_ratio):
super(InvertedResidual, self).__init__()
hidden_channel = in_channel * expand_ratio
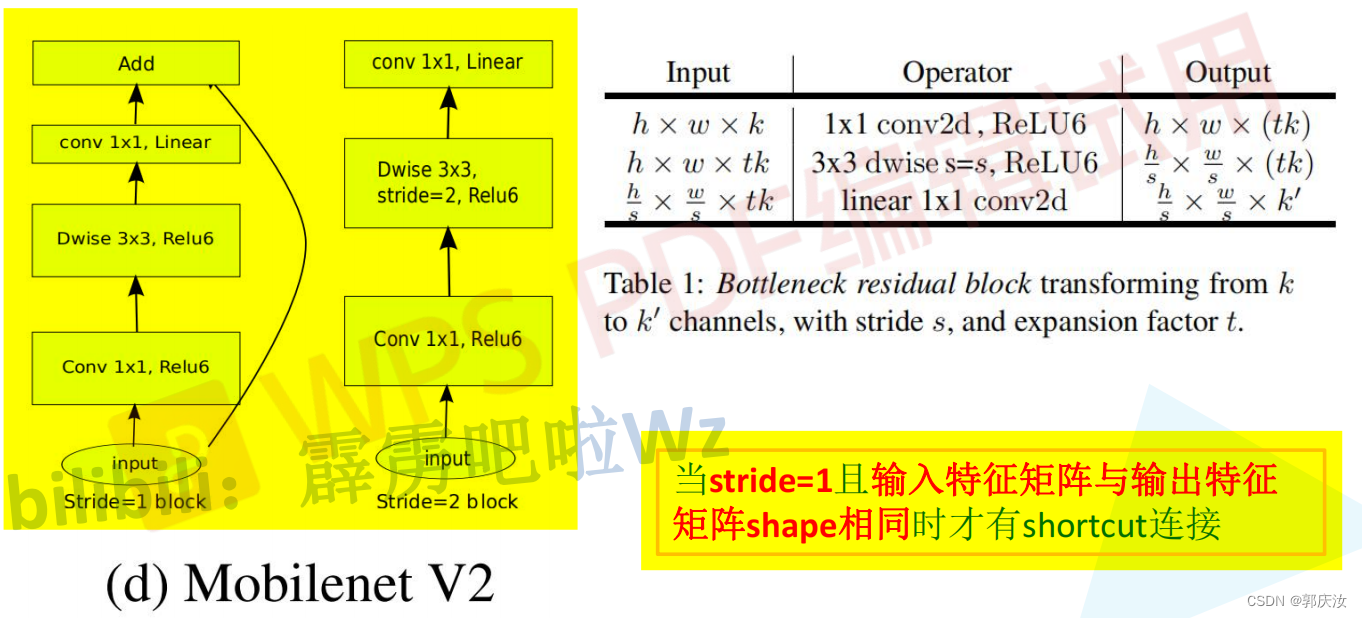
self.use_shortcut = stride == 1 and in_channel == out_channel # stride == 1 and in_channel == out_channel:保证输入矩阵与输出矩阵的shape一致,且通道数也一致,这样才可以进行shurtcut
layers = []
if expand_ratio != 1: # 表示如果扩展因子不为1时,则使用1x1的卷积层(即对输入特征矩阵的深度进行扩充)
# 1x1 pointwise conv
layers.append(ConvBNReLU(in_channel, hidden_channel, kernel_size=1))
layers.extend([
# 3x3 depthwise conv
# 在pytorch中,如果设置的 group=1的话,就为普通卷积;如果设置的值为输入特征矩阵的深度的话(即in_channel),则为深度卷积(deptwise conv),并且Dw卷积的输出特征矩阵的深度等于输入特征矩阵的深度
ConvBNReLU(hidden_channel, hidden_channel, stride=stride, groups=hidden_channel),
# 1x1 pointwise conv(linear) 因为其后跟随的是线性激活函数,即y=x,所以其后面不在跟随激活函数
nn.Conv2d(hidden_channel, out_channel, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channel),
])
self.conv = nn.Sequential(*layers)
def forward(self, x):
if self.use_shortcut:
return x + self.conv(x)
else:
return self.conv(x)
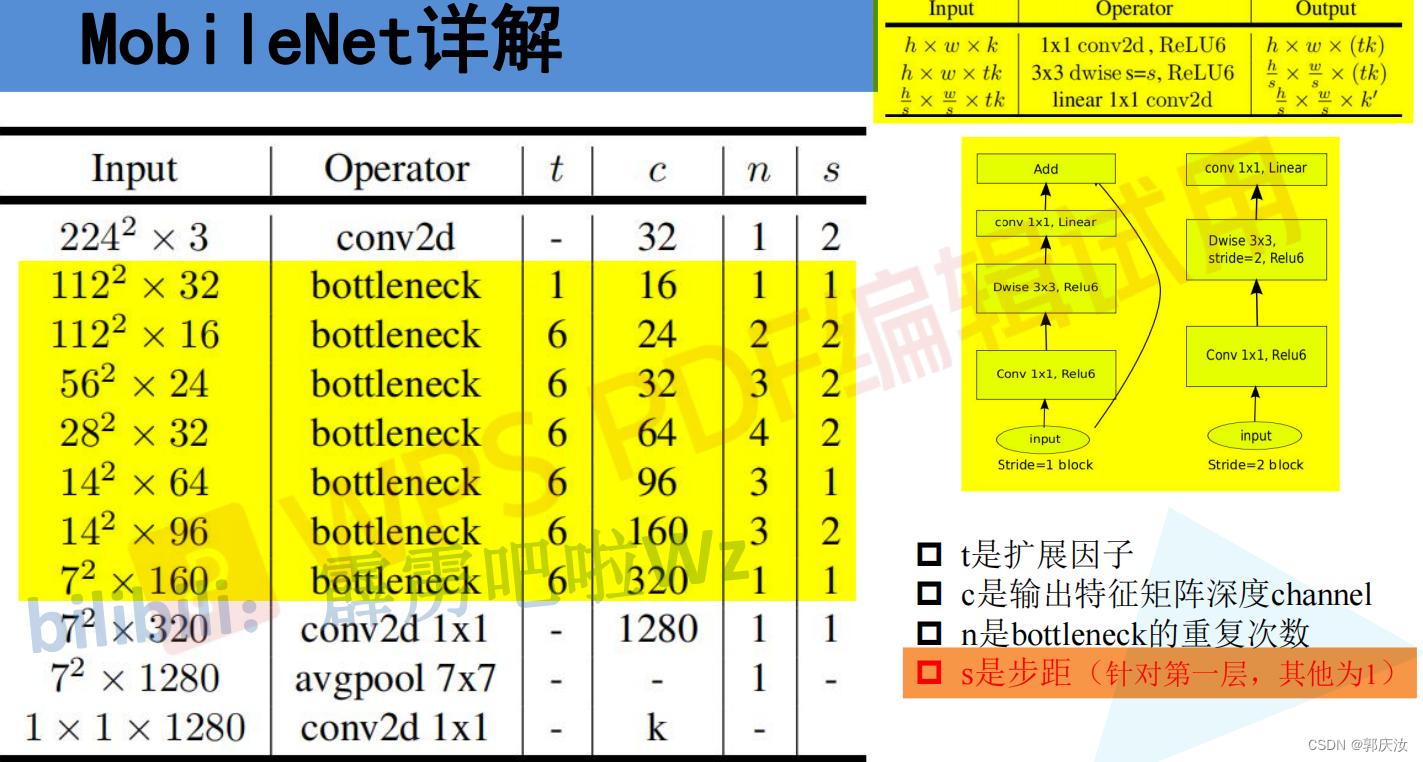
MobileNet V2详细网络结构
MobileNet V2网络结构代码
from torch import nn
import torch
def _make_divisible(ch, divisor=8, min_ch=None):
"""
将输入的通道数(ch)调整到divisor的整数倍,方便硬件加速
This function is taken from the original tf repo.
It ensures that all layers have a channel number that is divisible by 8
It can be seen here:
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
"""
if min_ch is None:
min_ch = divisor
new_ch = max(min_ch, int(ch + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_ch < 0.9 * ch:
new_ch += divisor
return new_ch
# 定义普通卷积、BN结构
class ConvBNReLU(nn.Sequential):
def __init__(self, in_channel, out_channel, kernel_size=3, stride=1, groups=1):
padding = (kernel_size - 1) // 2 # padding的设置根据kernel_size来定,如果kernel_size为3,则padding设置为1;如果kernel_size为1,为padding为0
super(ConvBNReLU, self).__init__(
# 在pytorch中,如果设置的 group=1的话,就为普通卷积;如果设置的值为输入特征矩阵的深度的话(即in_channel),则为深度卷积(deptwise conv),并且Dw卷积的输出特征矩阵的深度等于输入特征矩阵的深度
nn.Conv2d(in_channel, out_channel, kernel_size, stride, padding, groups=groups, bias=False), # groups=1,表示普通的卷积;因为接下来要使用的是BN层,此处的偏置不起任何作用,所以设置为1
nn.BatchNorm2d(out_channel),
nn.ReLU6(inplace=True) # 此处使用的是Relu6激活函数
)
# 定义mobile网络基本结构--即到残差结构
class InvertedResidual(nn.Module):
def __init__(self, in_channel, out_channel, stride, expand_ratio):
super(InvertedResidual, self).__init__()
hidden_channel = in_channel * expand_ratio
self.use_shortcut = stride == 1 and in_channel == out_channel # stride == 1 and in_channel == out_channel:保证输入矩阵与输出矩阵的shape一致,且通道数也一致,这样才可以进行shurtcut
layers = []
if expand_ratio != 1: # 表示如果扩展因子不为1时,则使用1x1的卷积层(即对输入特征矩阵的深度进行扩充)
# 1x1 pointwise conv
layers.append(ConvBNReLU(in_channel, hidden_channel, kernel_size=1))
layers.extend([
# 3x3 depthwise conv
# 在pytorch中,如果设置的 group=1的话,就为普通卷积;如果设置的值为输入特征矩阵的深度的话(即in_channel),则为深度卷积(deptwise conv),并且Dw卷积的输出特征矩阵的深度等于输入特征矩阵的深度
ConvBNReLU(hidden_channel, hidden_channel, stride=stride, groups=hidden_channel),
# 1x1 pointwise conv(linear) 因为其后跟随的是线性激活函数,即y=x,所以其后面不在跟随激活函数
nn.Conv2d(hidden_channel, out_channel, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channel),
])
self.conv = nn.Sequential(*layers)
def forward(self, x):
if self.use_shortcut:
return x + self.conv(x)
else:
return self.conv(x)
# 定义mobileNetV2网络
class MobileNetV2(nn.Module):
def __init__(self, num_classes=1000, alpha=1.0, round_nearest=8):
super(MobileNetV2, self).__init__()
block = InvertedResidual
input_channel = _make_divisible(32 * alpha, round_nearest) # 将卷积核的个数调整为8的整数倍
last_channel = _make_divisible(1280 * alpha, round_nearest)
inverted_residual_setting = [
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
features = []
# conv1 layer
features.append(ConvBNReLU(3, input_channel, stride=2)) # 添加第一层普通卷积层
# building inverted residual residual blockes
for t, c, n, s in inverted_residual_setting:
output_channel = _make_divisible(c * alpha, round_nearest) # 根据alpha因子调整卷积核的个数
for i in range(n): # 循环添加倒残差模块
stride = s if i == 0 else 1 # s表示的是倒残差模块结构中第一层卷积对应的步距,剩余层都是1
features.append(block(input_channel, output_channel, stride, expand_ratio=t)) # 添加一系列倒残差结构
input_channel = output_channel
# building last several layers
features.append(ConvBNReLU(input_channel, last_channel, 1)) # 构建最后一层卷积层
# combine feature layers
self.features = nn.Sequential(*features)
# building classifier
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # 采用自适应平均采样层
self.classifier = nn.Sequential(
nn.Dropout(0.2),
nn.Linear(last_channel, num_classes)
)
# weight initialization 初始化全只能怪
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01) # 初始化为正态分布的函数,均值为0,方差为0.01
nn.init.zeros_(m.bias)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
if __name__ == '__main__':
divisible = _make_divisible(1)
print(divisible)
4、MobileNet V3
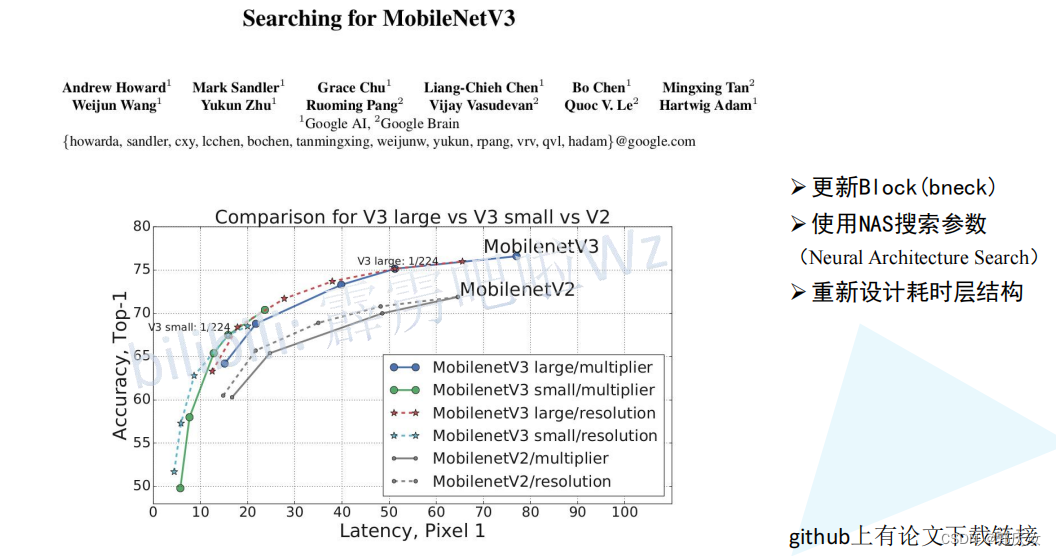
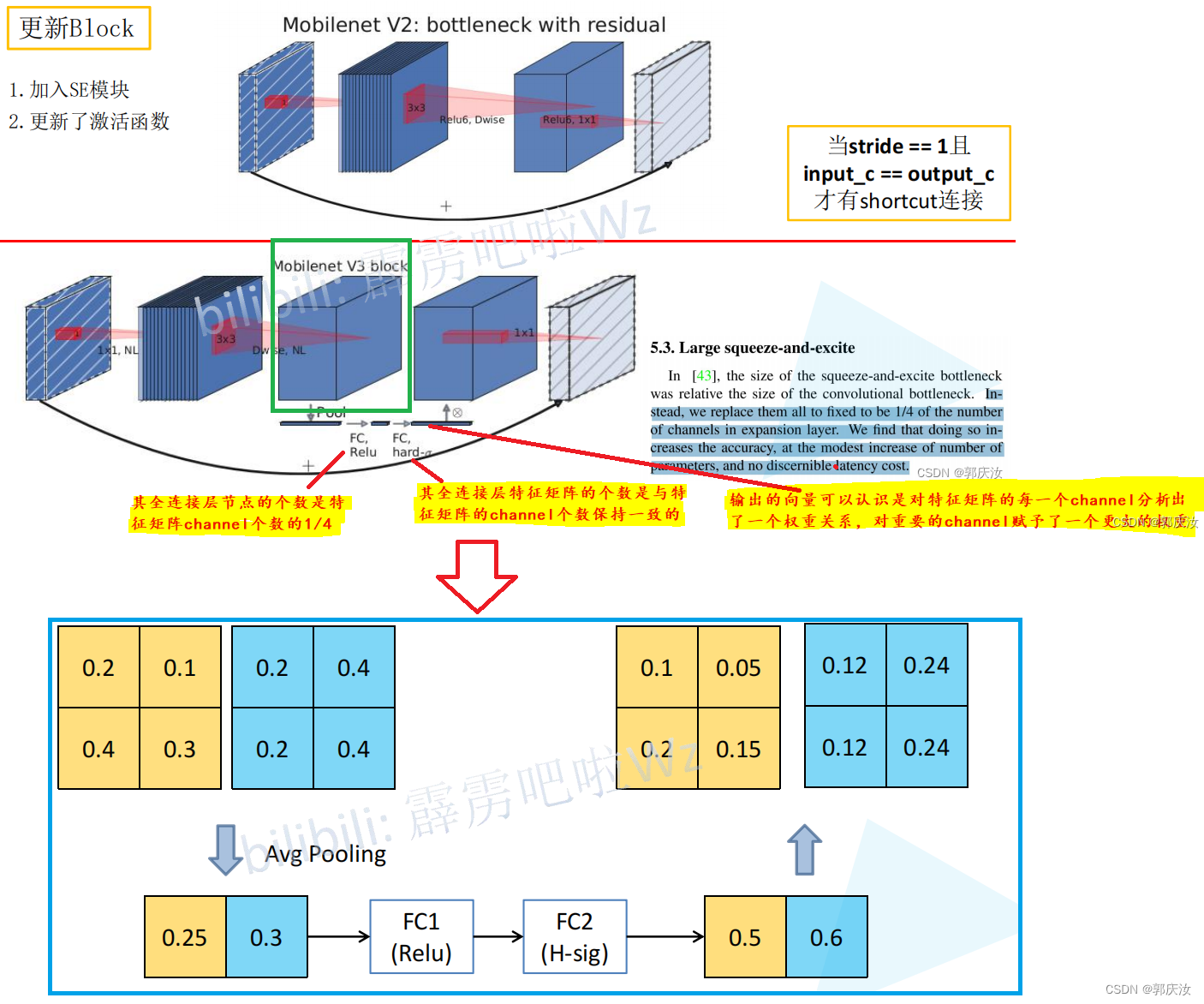
创新点
- 加入了注意力机制SE模块
- 使用的新的激活函数
- 激活函数
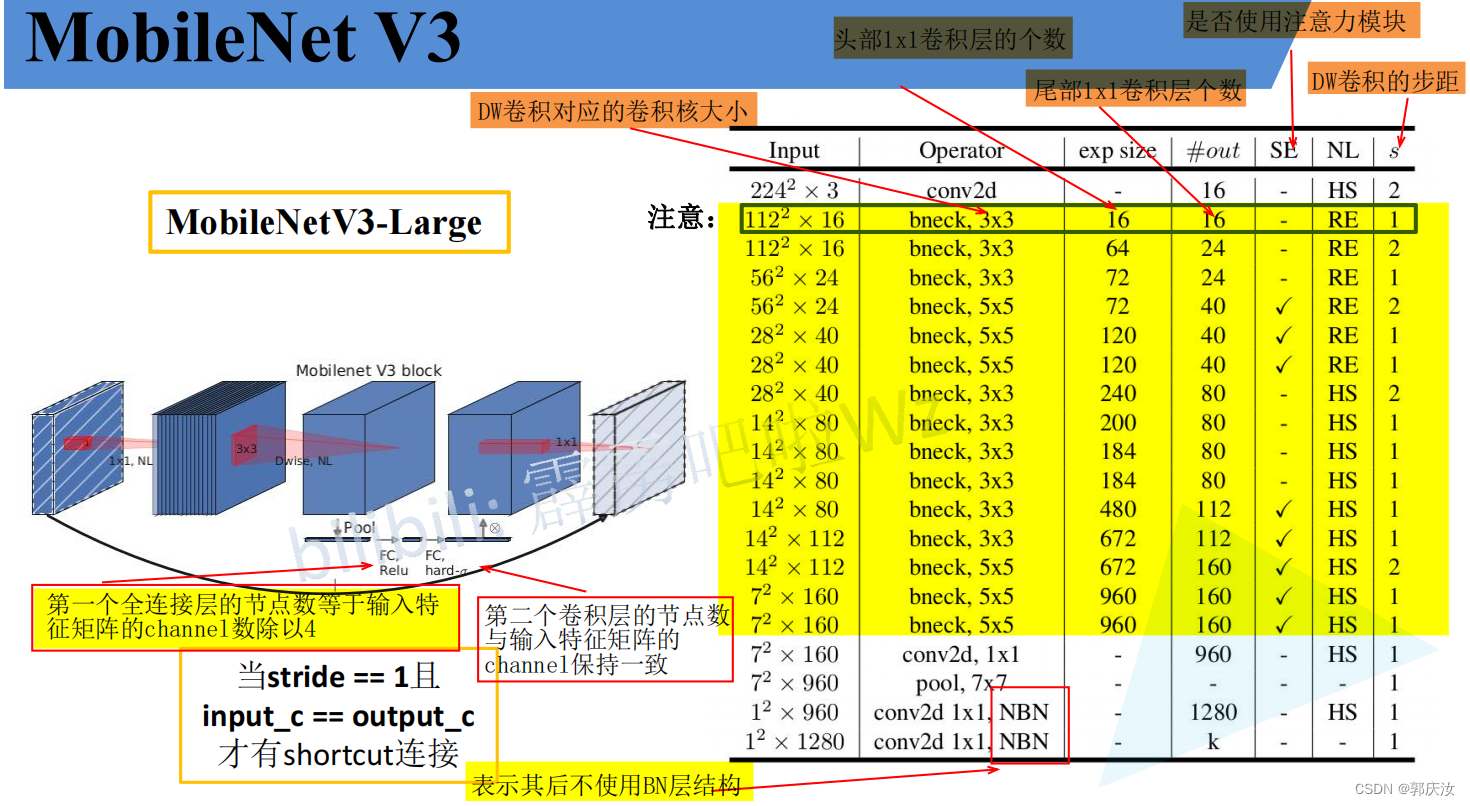
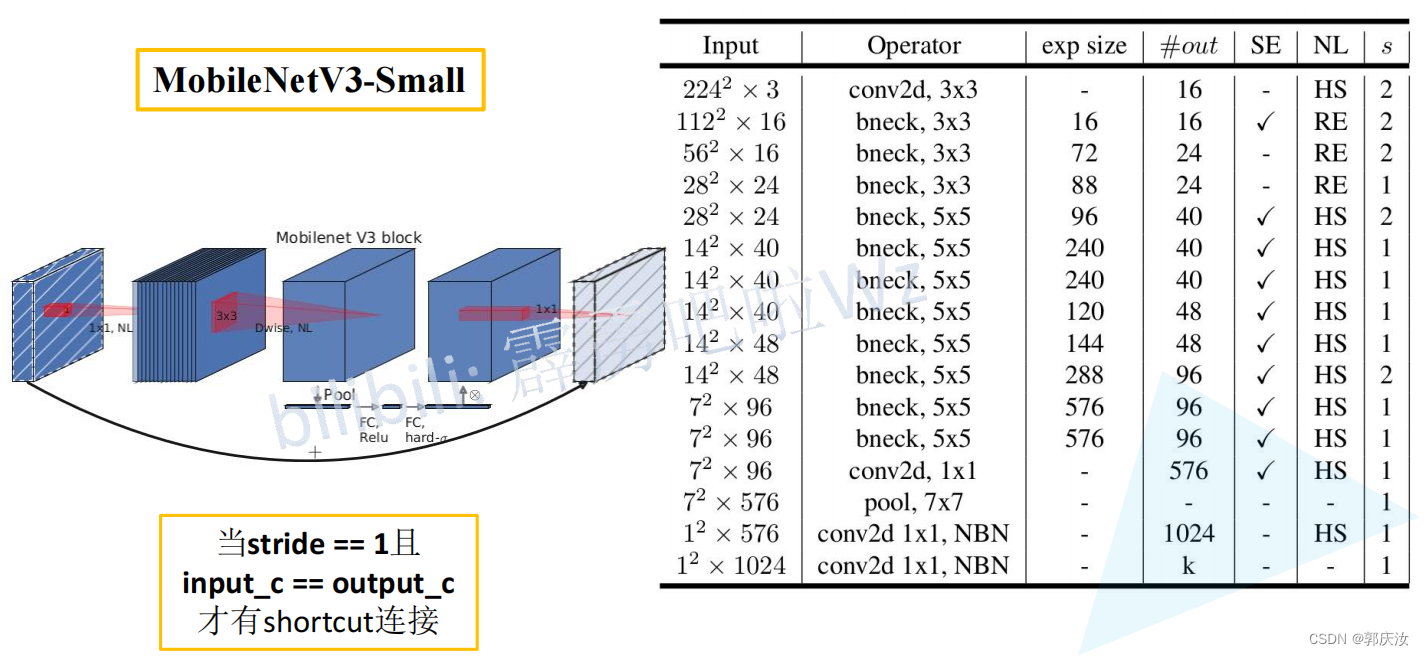
MobileNet V3详细网络结构
# 定义block的配置类
class InvertedResidualConfig:
def __init__(self,
input_c: int, # block模块中的第一个1x1卷积层的输入channel数
kernel: int, # depthwise卷积的卷积核大小
expanded_c: int, # block模块中的第一个1x1卷积层的输出channel数
out_c: int, # 经过block模块中第二个1x1卷积层处理过后得到的channel数
use_se: bool, # 是否使用注意力机制模块
activation: str, # 激活方式
stride: int, # 步长
width_multi: float): # width_multi:调节每个卷积层所使用channel的倍率因子
self.input_c = self.adjust_channels(input_c, width_multi)
self.kernel = kernel
self.expanded_c = self.adjust_channels(expanded_c, width_multi)
self.out_c = self.adjust_channels(out_c, width_multi)
self.use_se = use_se
self.use_hs = activation == "HS" # whether using h-swish activation
self.stride = stride
@staticmethod
def adjust_channels(channels: int, width_multi: float):
return _make_divisible(channels * width_multi, 8)
注意力机制SE模块代码
# 注意力机制模块(SE模块,即两个全连接层) 该模块的基本流程是:先进行自适应平均池化(1x1)———>1x1的卷积层———>relu激活层———>1x1的卷积池化———>hardsigmoid()激活函数激活
class SqueezeExcitation(nn.Module):
def __init__(self, input_c: int, squeeze_factor: int = 4):
super(SqueezeExcitation, self).__init__()
squeeze_c = _make_divisible(input_c // squeeze_factor, 8) # 获得距离该数最近的8的整数倍的数字
self.fc1 = nn.Conv2d(input_c, squeeze_c, 1) # 该卷积的输出的squeeze_c是输入input_c的1/4
self.fc2 = nn.Conv2d(squeeze_c, input_c, 1)
def forward(self, x: Tensor) -> Tensor:
scale = F.adaptive_avg_pool2d(x, output_size=(1, 1)) # 将特征矩阵每一个channel上的数据给平均池化到1x1的大小
scale = self.fc1(scale)
scale = F.relu(scale, inplace=True)
scale = self.fc2(scale)
scale = F.hardsigmoid(scale, inplace=True) # 激活函数
return scale * x # 将得到的数据与传入的对应channel数据进行相乘
InvertedResidual模块代码
# 定义block模块
# 此为block模块,其包含第一个1x1卷积层、DeptWis卷积层、SE注意力机制层(判断是否需求)、第二个1x1卷积层、激活函数(需要判断是否是非线性激活)
class InvertedResidual(nn.Module):
def __init__(self,
cnf: InvertedResidualConfig, # cnf:配置类参数
norm_layer: Callable[..., nn.Module]): # norm_layer:# BN层
super(InvertedResidual, self).__init__()
if cnf.stride not in [1, 2]: # 判断某一层的配置文件,其步长是否满足条件
raise ValueError("illegal stride value.")
# 判断是否进行短连接
self.use_res_connect = (cnf.stride == 1 and cnf.input_c == cnf.out_c) # 只有当步长为1,并且输入通道等于输出通道数
layers: List[nn.Module] = []
activation_layer = nn.Hardswish if cnf.use_hs else nn.ReLU # 判断当前的激活函数类型
# expand
# 判断是否相等,如果相等,则不适用1x1的卷积层增加channel维度;不相等的话,才使用该层进行升维度
if cnf.expanded_c != cnf.input_c:
layers.append(ConvBNActivation(cnf.input_c,
cnf.expanded_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=activation_layer))
# depthwise
layers.append(ConvBNActivation(cnf.expanded_c,
cnf.expanded_c,
kernel_size=cnf.kernel, # depthwise卷积的卷积核大小
stride=cnf.stride,
groups=cnf.expanded_c,
norm_layer=norm_layer, # BN层
activation_layer=activation_layer))
# 判断是否需要添加SE模块
if cnf.use_se:
layers.append(SqueezeExcitation(cnf.expanded_c))
# project
layers.append(ConvBNActivation(cnf.expanded_c,
cnf.out_c,
kernel_size=1,
norm_layer=norm_layer, # BN 层
activation_layer=nn.Identity)) # 此层的activation_layer就是进行里普通的线性激活,没有做任何的处理
self.block = nn.Sequential(*layers)
self.out_channels = cnf.out_c
self.is_strided = cnf.stride > 1
def forward(self, x: Tensor) -> Tensor:
result = self.block(x)
if self.use_res_connect:
result += x # 进行shortcut连接
return result
整体代码
from typing import Callable, List, Optional
import torch
from torch import nn, Tensor
from torch.nn import functional as F
from functools import partial
# 得到同传入数据最近的8的整数倍数值
def _make_divisible(ch, divisor=8, min_ch=None):
"""
This function is taken from the original tf repo.
It ensures that all layers have a channel number that is divisible by 8
It can be seen here:
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
"""
if min_ch is None:
min_ch = divisor
new_ch = max(min_ch, int(ch + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_ch < 0.9 * ch:
new_ch += divisor
return new_ch
# 普通卷积、BN、激活层模块
class ConvBNActivation(nn.Sequential):
def __init__(self,
in_planes: int, # 输入特征矩阵的通道
out_planes: int, # 输出特征矩阵的通道
kernel_size: int = 3,
stride: int = 1,
groups: int = 1,
norm_layer: Optional[Callable[..., nn.Module]] = None, # 在卷积后的BN层
activation_layer: Optional[Callable[..., nn.Module]] = None): # 激活函数
padding = (kernel_size - 1) // 2
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if activation_layer is None:
activation_layer = nn.ReLU6
super(ConvBNActivation, self).__init__(nn.Conv2d(in_channels=in_planes,
out_channels=out_planes,
kernel_size=kernel_size,
stride=stride,
padding=padding,
groups=groups,
bias=False),
norm_layer(out_planes), # BN层
activation_layer(inplace=True))
# 注意力机制模块(SE模块,即两个全连接层) 该模块的基本流程是:先进行自适应平均池化(1x1)———>1x1的卷积层———>relu激活层———>1x1的卷积池化———>hardsigmoid()激活函数激活
class SqueezeExcitation(nn.Module):
def __init__(self, input_c: int, squeeze_factor: int = 4):
super(SqueezeExcitation, self).__init__()
squeeze_c = _make_divisible(input_c // squeeze_factor, 8) # 获得距离该数最近的8的整数倍的数字
self.fc1 = nn.Conv2d(input_c, squeeze_c, 1) # 该卷积的输出的squeeze_c是输入input_c的1/4 其作用与全连接层一样
self.fc2 = nn.Conv2d(squeeze_c, input_c, 1)
def forward(self, x: Tensor) -> Tensor:
scale = F.adaptive_avg_pool2d(x, output_size=(1, 1)) # 将特征矩阵每一个channel上的数据给平均池化到1x1的大小
scale = self.fc1(scale)
scale = F.relu(scale, inplace=True)
scale = self.fc2(scale)
scale = F.hardsigmoid(scale, inplace=True) # 激活函数
return scale * x # 将得到的数据与传入的对应channel数据进行相乘
# 定义block的配置类
class InvertedResidualConfig:
def __init__(self,
input_c: int, # block模块中的第一个1x1卷积层的输入channel数
kernel: int, # depthwise卷积的卷积核大小
expanded_c: int, # block模块中的第一个1x1卷积层的输出channel数
out_c: int, # 经过block模块中第二个1x1卷积层处理过后得到的channel数
use_se: bool, # 是否使用注意力机制模块
activation: str, # 激活方式
stride: int, # 步长
width_multi: float): # width_multi:调节每个卷积层所使用channel的倍率因子
self.input_c = self.adjust_channels(input_c, width_multi)
self.kernel = kernel
self.expanded_c = self.adjust_channels(expanded_c, width_multi)
self.out_c = self.adjust_channels(out_c, width_multi)
self.use_se = use_se
self.use_hs = activation == "HS" # whether using h-swish activation
self.stride = stride
@staticmethod
def adjust_channels(channels: int, width_multi: float):
return _make_divisible(channels * width_multi, 8)
# 定义block模块
# 此为block模块,其包含第一个1x1卷积层、DeptWis卷积层、SE注意力机制层(判断是否需求)、第二个1x1卷积层、激活函数(需要判断是否是非线性激活)
class InvertedResidual(nn.Module):
def __init__(self,
cnf: InvertedResidualConfig, # cnf:配置类参数
norm_layer: Callable[..., nn.Module]): # norm_layer:# BN层
super(InvertedResidual, self).__init__()
if cnf.stride not in [1, 2]: # 判断某一层的配置文件,其步长是否满足条件
raise ValueError("illegal stride value.")
# 判断是否进行短连接
self.use_res_connect = (cnf.stride == 1 and cnf.input_c == cnf.out_c) # 只有当步长为1,并且输入通道等于输出通道数
layers: List[nn.Module] = []
activation_layer = nn.Hardswish if cnf.use_hs else nn.ReLU # 判断当前的激活函数类型
# expand
# 判断是否相等,如果相等,则不适用1x1的卷积层增加channel维度;不相等的话,才使用该层进行升维度
if cnf.expanded_c != cnf.input_c:
layers.append(ConvBNActivation(cnf.input_c,
cnf.expanded_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=activation_layer))
# depthwise
layers.append(ConvBNActivation(cnf.expanded_c,
cnf.expanded_c,
kernel_size=cnf.kernel, # depthwise卷积的卷积核大小
stride=cnf.stride,
groups=cnf.expanded_c, # 深度DW卷积
norm_layer=norm_layer, # BN层
activation_layer=activation_layer))
# 判断是否需要添加SE模块
if cnf.use_se:
layers.append(SqueezeExcitation(cnf.expanded_c))
# project
layers.append(ConvBNActivation(cnf.expanded_c,
cnf.out_c,
kernel_size=1,
norm_layer=norm_layer, # BN 层
activation_layer=nn.Identity)) # 此层的activation_layer就是进行里普通的线性激活,没有做任何的处理
self.block = nn.Sequential(*layers)
self.out_channels = cnf.out_c
self.is_strided = cnf.stride > 1
def forward(self, x: Tensor) -> Tensor:
result = self.block(x)
if self.use_res_connect:
result += x # 进行shortcut连接
return result
# MobileNetV3网络结构基础框架:其包括:模型的第一层卷积层———>nx【bneckBlock模块】———>1x1的卷积层———>自适应平均池化层———>全连接层———>全连接层
class MobileNetV3(nn.Module):
def __init__(self,
inverted_residual_setting: List[InvertedResidualConfig], # beneckBlock结构一系列参数列表
last_channel: int, # 对应的是倒数第二个全连接层输出节点数 1280
num_classes: int = 1000, # 类别个数
block: Optional[Callable[..., nn.Module]] = None, # InvertedResidual核心模块
norm_layer: Optional[Callable[..., nn.Module]] = None):
super(MobileNetV3, self).__init__()
if not inverted_residual_setting:
raise ValueError("The inverted_residual_setting should not be empty.")
elif not (isinstance(inverted_residual_setting, List) and
all([isinstance(s, InvertedResidualConfig) for s in inverted_residual_setting])):
raise TypeError("The inverted_residual_setting should be List[InvertedResidualConfig]")
if block is None:
block = InvertedResidual # block类
if norm_layer is None:
norm_layer = partial(nn.BatchNorm2d, eps=0.001, momentum=0.01) # partial()为python方法,即为nn.BatchNorm2d传入默认的两个参数
layers: List[nn.Module] = []
# building first layer
# 构建第一层卷积结构
firstconv_output_c = inverted_residual_setting[0].input_c # 表示第一个卷积层输出的channel数
layers.append(ConvBNActivation(3, # 输入图像数据的channel数
firstconv_output_c, # 输出channel
kernel_size=3,
stride=2,
norm_layer=norm_layer,
activation_layer=nn.Hardswish))
# building inverted residual blocks
# 利用循环的方式添加block模块,将每层的配置文件传给block
for cnf in inverted_residual_setting:
layers.append(block(cnf, norm_layer))
# building last several layers
lastconv_input_c = inverted_residual_setting[-1].out_c # 最后的bneckblock的输出channel
lastconv_output_c = 6 * lastconv_input_c # lastconv_output_c 与 最后的bneckblock的输出channel数是六倍的关系
# 定义最后一层的卷积层
layers.append(ConvBNActivation(lastconv_input_c, # 最后的bneckblock的输出channel数
lastconv_output_c, # lastconv_output_c 与 最后的bneckblock的输出channel数是六倍的关系
kernel_size=1,
norm_layer=norm_layer,
activation_layer=nn.Hardswish))
self.features = nn.Sequential(*layers)
self.avgpool = nn.AdaptiveAvgPool2d(1)
self.classifier = nn.Sequential(nn.Linear(lastconv_output_c, last_channel),
nn.Hardswish(inplace=True),
nn.Dropout(p=0.2, inplace=True),
nn.Linear(last_channel, num_classes))
# initial weights
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out")
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.zeros_(m.bias)
def _forward_impl(self, x: Tensor) -> Tensor:
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
def forward(self, x: Tensor) -> Tensor:
return self._forward_impl(x)
### 构建large基础mobilenet_v3_large模型
def mobilenet_v3_large(num_classes: int = 1000,
reduced_tail: bool = False) -> MobileNetV3:
"""
Constructs a large MobileNetV3 architecture from
"Searching for MobileNetV3" <https://arxiv.org/abs/1905.02244>.
weights_link:
https://download.pytorch.org/models/mobilenet_v3_large-8738ca79.pth
Args:
num_classes (int): number of classes
reduced_tail (bool): If True, reduces the channel counts of all feature layers
between C4 and C5 by 2. It is used to reduce the channel redundancy in the
backbone for Detection and Segmentation.
"""
width_multi = 1.0
bneck_conf = partial(InvertedResidualConfig, width_multi=width_multi)
adjust_channels = partial(InvertedResidualConfig.adjust_channels, width_multi=width_multi)
reduce_divider = 2 if reduced_tail else 1 # 是否较少网络参数标志,默认是False,即不减少
# # beneckBlock结构一系列参数列表
inverted_residual_setting = [
# input_c, kernel, expanded_c, out_c, use_se, activation, stride
bneck_conf(16, 3, 16, 16, False, "RE", 1),
bneck_conf(16, 3, 64, 24, False, "RE", 2), # C1
bneck_conf(24, 3, 72, 24, False, "RE", 1),
bneck_conf(24, 5, 72, 40, True, "RE", 2), # C2
bneck_conf(40, 5, 120, 40, True, "RE", 1),
bneck_conf(40, 5, 120, 40, True, "RE", 1),
bneck_conf(40, 3, 240, 80, False, "HS", 2), # C3
bneck_conf(80, 3, 200, 80, False, "HS", 1),
bneck_conf(80, 3, 184, 80, False, "HS", 1),
bneck_conf(80, 3, 184, 80, False, "HS", 1),
bneck_conf(80, 3, 480, 112, True, "HS", 1),
bneck_conf(112, 3, 672, 112, True, "HS", 1),
bneck_conf(112, 5, 672, 160 // reduce_divider, True, "HS", 2), # C4
bneck_conf(160 // reduce_divider, 5, 960 // reduce_divider, 160 // reduce_divider, True, "HS", 1),
bneck_conf(160 // reduce_divider, 5, 960 // reduce_divider, 160 // reduce_divider, True, "HS", 1),
]
last_channel = adjust_channels(1280 // reduce_divider) # C5
return MobileNetV3(inverted_residual_setting=inverted_residual_setting,
last_channel=last_channel,
num_classes=num_classes)
### 构建small基础mobilenet_v3_small模型
def mobilenet_v3_small(num_classes: int = 1000,
reduced_tail: bool = False) -> MobileNetV3:
"""
Constructs a large MobileNetV3 architecture from
"Searching for MobileNetV3" <https://arxiv.org/abs/1905.02244>.
weights_link:
https://download.pytorch.org/models/mobilenet_v3_small-047dcff4.pth
Args:
num_classes (int): number of classes
reduced_tail (bool): If True, reduces the channel counts of all feature layers
between C4 and C5 by 2. It is used to reduce the channel redundancy in the
backbone for Detection and Segmentation.
"""
width_multi = 1.0
bneck_conf = partial(InvertedResidualConfig, width_multi=width_multi)
adjust_channels = partial(InvertedResidualConfig.adjust_channels, width_multi=width_multi)
reduce_divider = 2 if reduced_tail else 1
inverted_residual_setting = [
# input_c, kernel, expanded_c, out_c, use_se, activation, stride
bneck_conf(16, 3, 16, 16, True, "RE", 2), # C1
bneck_conf(16, 3, 72, 24, False, "RE", 2), # C2
bneck_conf(24, 3, 88, 24, False, "RE", 1),
bneck_conf(24, 5, 96, 40, True, "HS", 2), # C3
bneck_conf(40, 5, 240, 40, True, "HS", 1),
bneck_conf(40, 5, 240, 40, True, "HS", 1),
bneck_conf(40, 5, 120, 48, True, "HS", 1),
bneck_conf(48, 5, 144, 48, True, "HS", 1),
bneck_conf(48, 5, 288, 96 // reduce_divider, True, "HS", 2), # C4
bneck_conf(96 // reduce_divider, 5, 576 // reduce_divider, 96 // reduce_divider, True, "HS", 1),
bneck_conf(96 // reduce_divider, 5, 576 // reduce_divider, 96 // reduce_divider, True, "HS", 1)
]
last_channel = adjust_channels(1024 // reduce_divider) # C5
return MobileNetV3(inverted_residual_setting=inverted_residual_setting,
last_channel=last_channel,
num_classes=num_classes)
pytorch代码复现MobileNet V1~V2
本项目包含训练MobileNet V1、V2、V2模型
项目目录
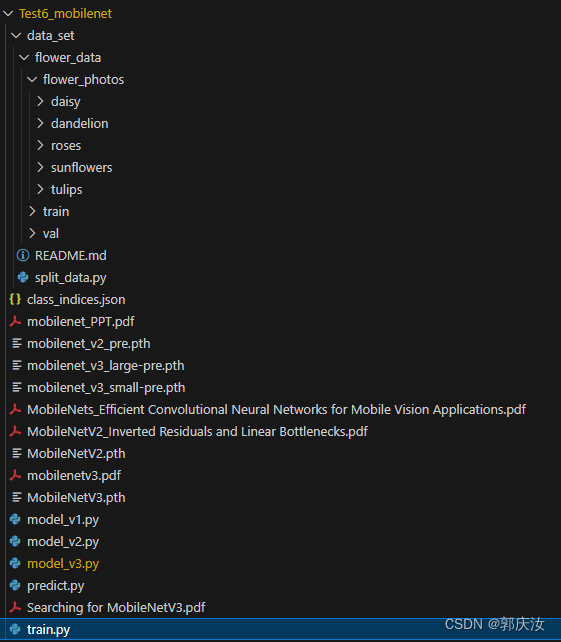
项目代码下载地址:
项目代码下载地址