在交互过程中,环境会对末端执行器可以遵循的几何路径设置约束。这种情况通常被称为约束运动。在这种情况下,使用纯运动控制策略来控制交互是失败的!!
只有任务准确规划,使用运动控制才能成功执行与环境的交互任务。但很难获得对环境的详细描述!!
在实践中,规划误差可能会引起一个接触力,导致末端执行器偏离所期望的轨迹。另一方面,控制系统的反应是减少这种偏差。这最终会导致接触力的累积,直到接头执行器达到饱和或接触中的部件发生断裂。
接触力是以最完整的方式描述相互作用状态的量。因此,如果力测量可用,预计可以通过交互控制实现增强的性能。为此目的,可以将力/扭矩传感器安装在机器人机械手上,通常在手腕和末端执行器之间,其读数应通过适当的接口传递给机器人控制单元。
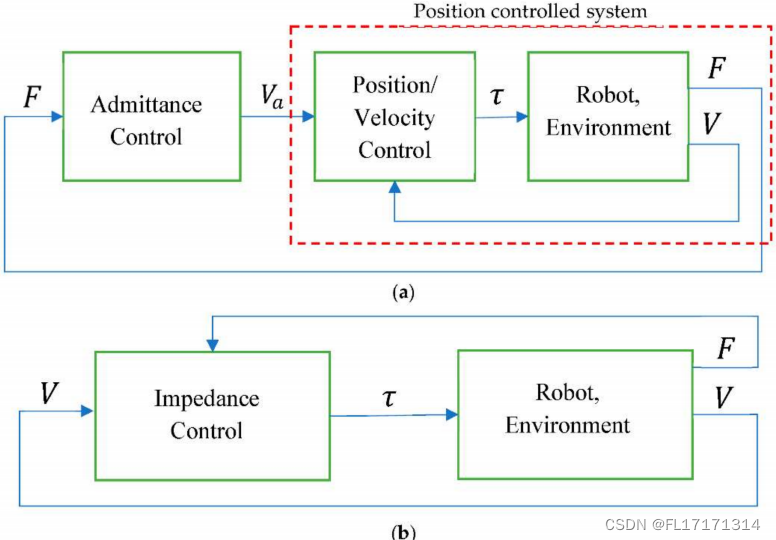
机器人阻抗控制与导纳控制:
阻抗控制器不需要使用力传感器。机器人的动态行为是通过调整虚拟阻尼、惯性和刚度来调整的,而不是独立地控制位置或力。
参考文献:
【1】Human–Robot Interaction: A Review and Analysis on Variable
Admittance Control, Safety, and Perspectives