左手坐标系:DX、3DMax
右手坐标系:OpenGL
世界坐标系、物体坐标系、摄像机坐标系
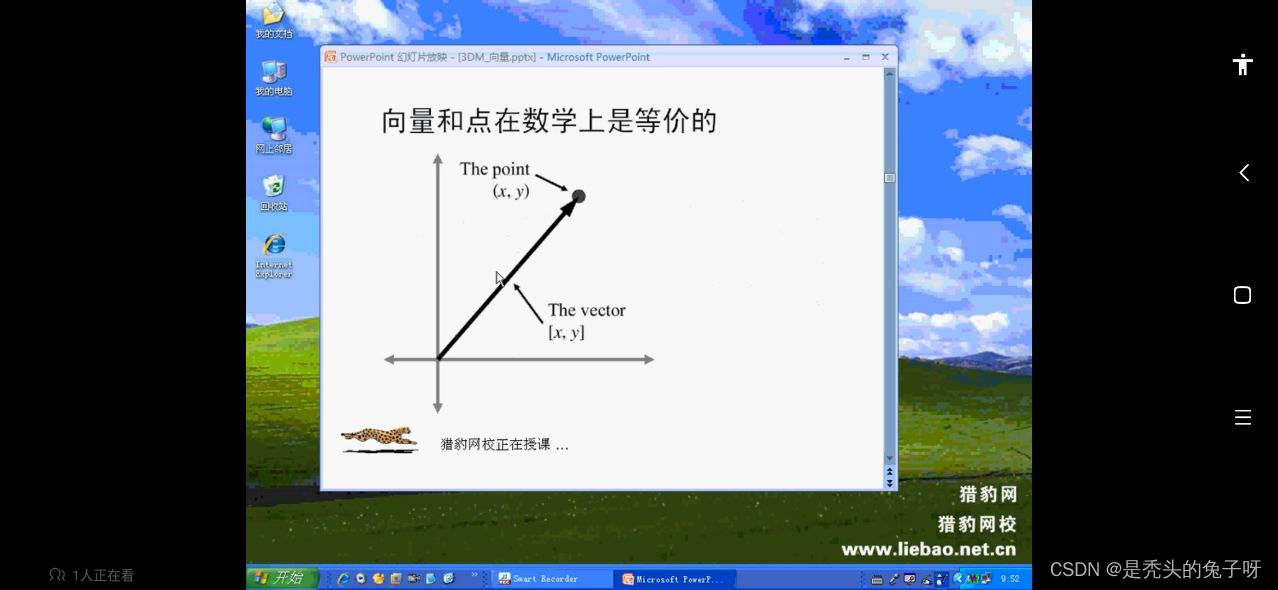
向量和点在数学上是等价的,向量是有大小和方向的有向线段,向量没有位置,只有大小和方向
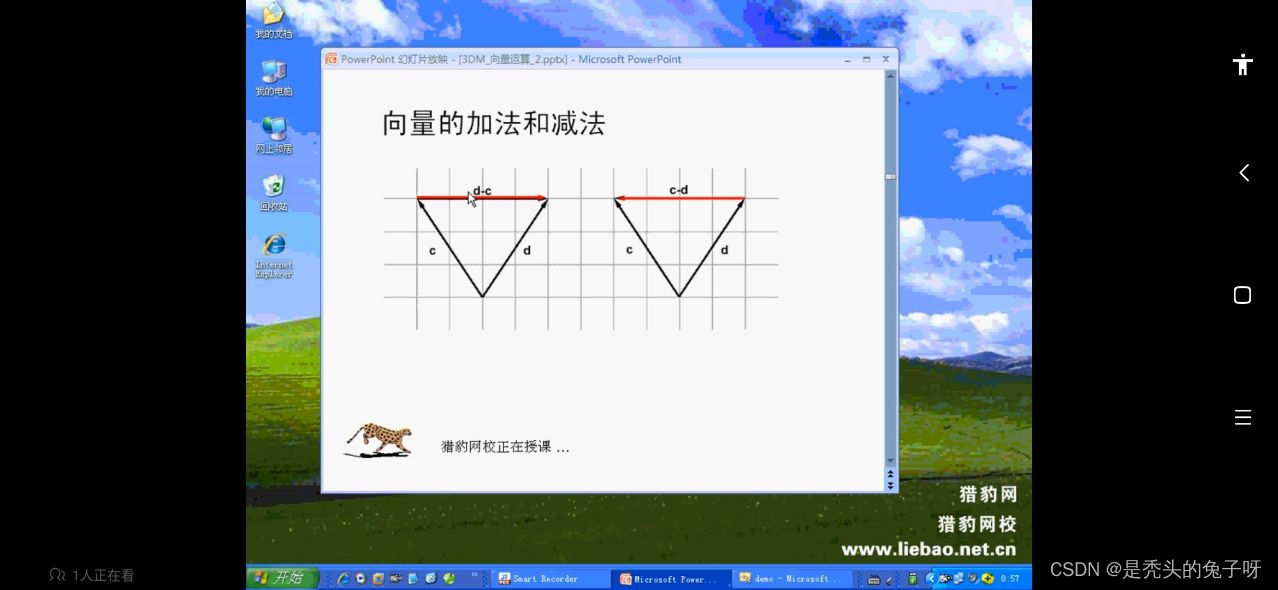
向量运算:
零向量:[ 0, 0, 0 ] 是唯一一个没有方向的向量
负向量:-[ x, y ] = [ -x, -y ]
向量大小、长度、模:模(x, y) = sqrt(x² + y²)
标量与向量的乘法:2 * [ x, y ] = [ 2x, 2y ]
单位向量(标准化向量): [ x, y ] / [ sqrt(x² + y²) ]
向量点乘:a * b = | a | | b | cosx [ x, y ] * [ a, b ] = xa + yb
向量叉乘:[ x, y, z ] * [ a ,b, c ] = [ y1z2 - z1y2, z1x2 - x1z2, x1y2 - y1x2 ]
矩阵运算:
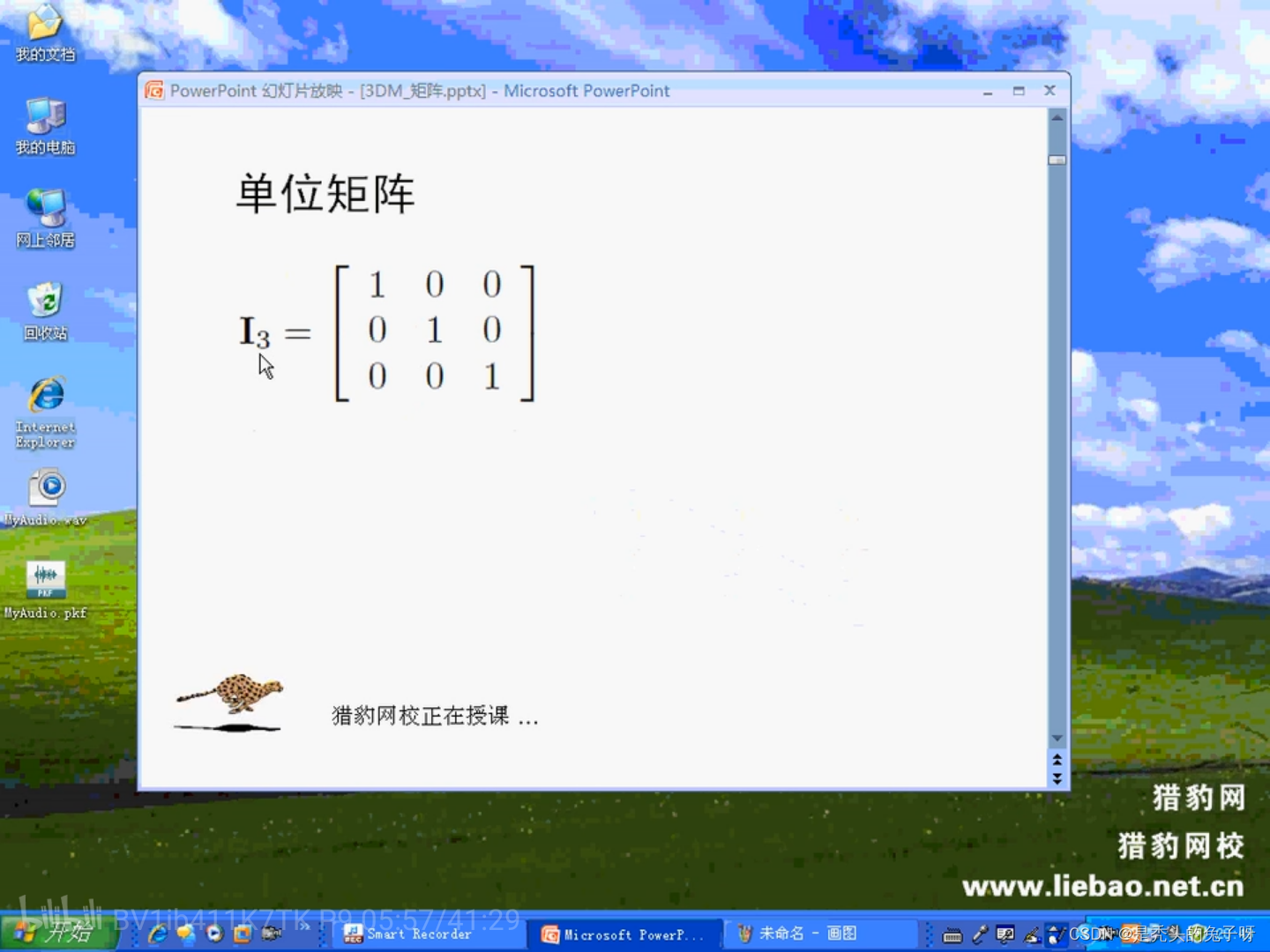
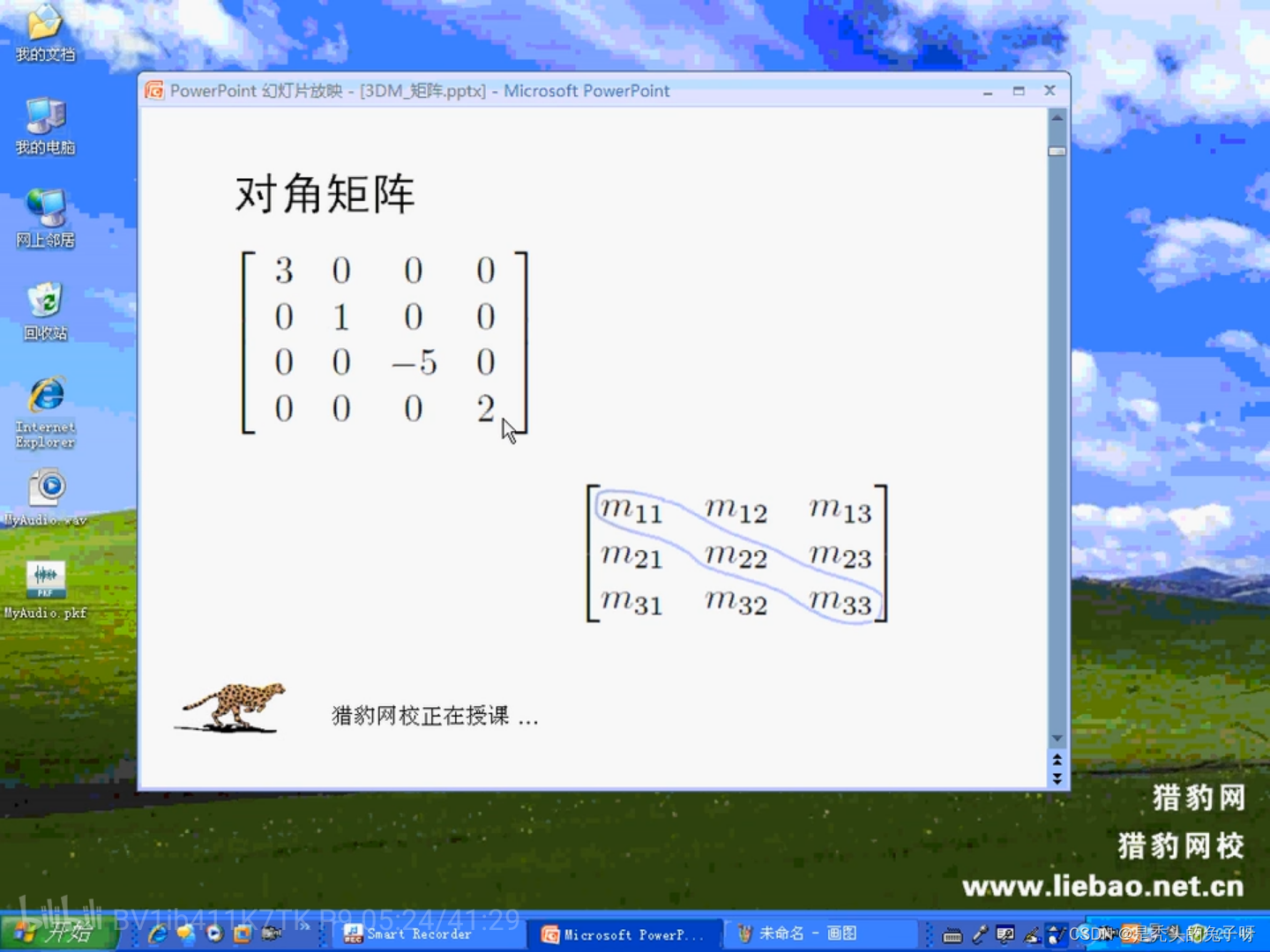
标量与矩阵的乘法:
kM = k * [m11, m12, m13] = [km11, km12, km13]
[m21, m22, m23] [km21, km22, km23]
[m31, m32, m33] [km31, km32, km33]
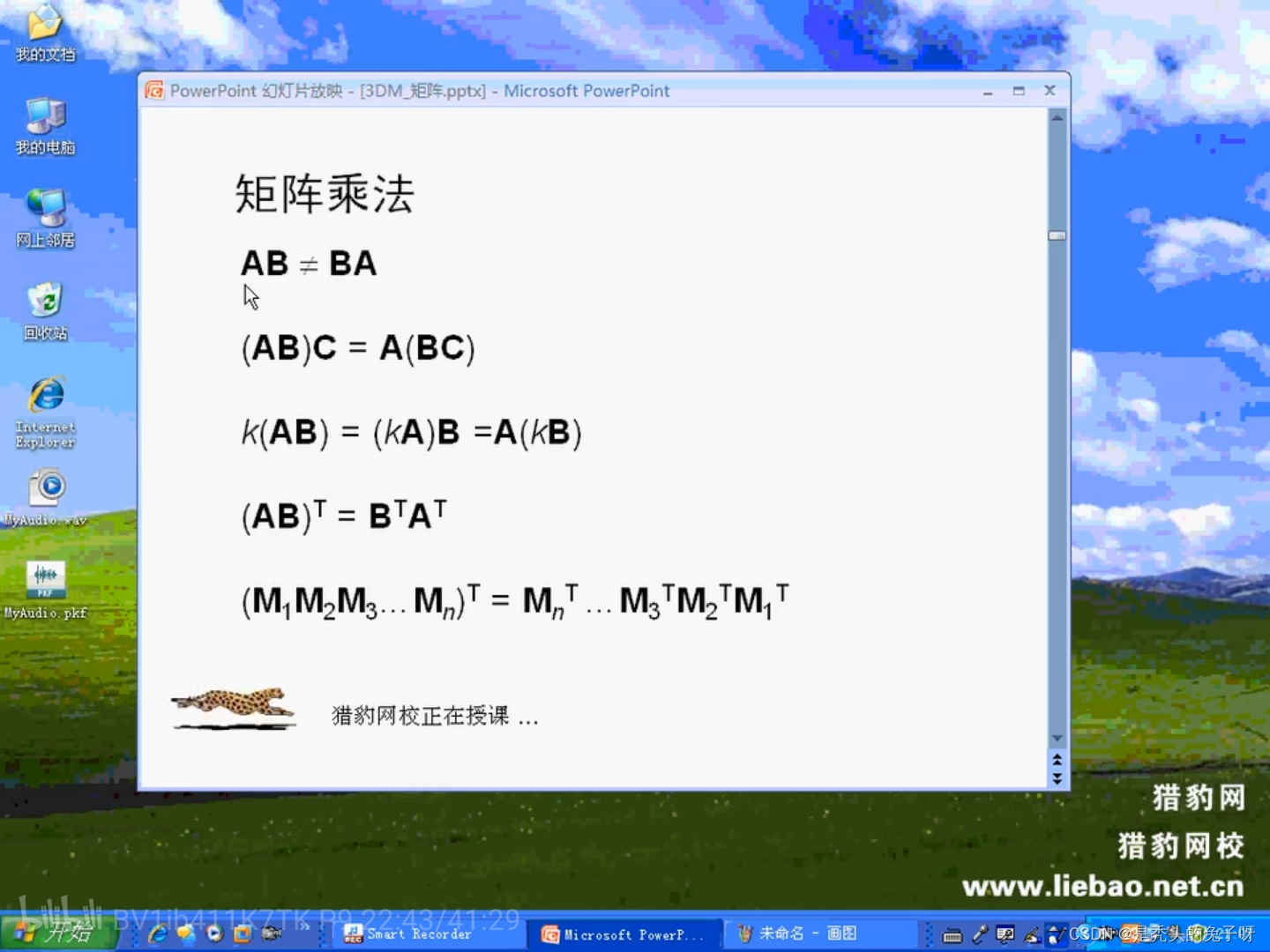
矩阵与矩阵的乘法
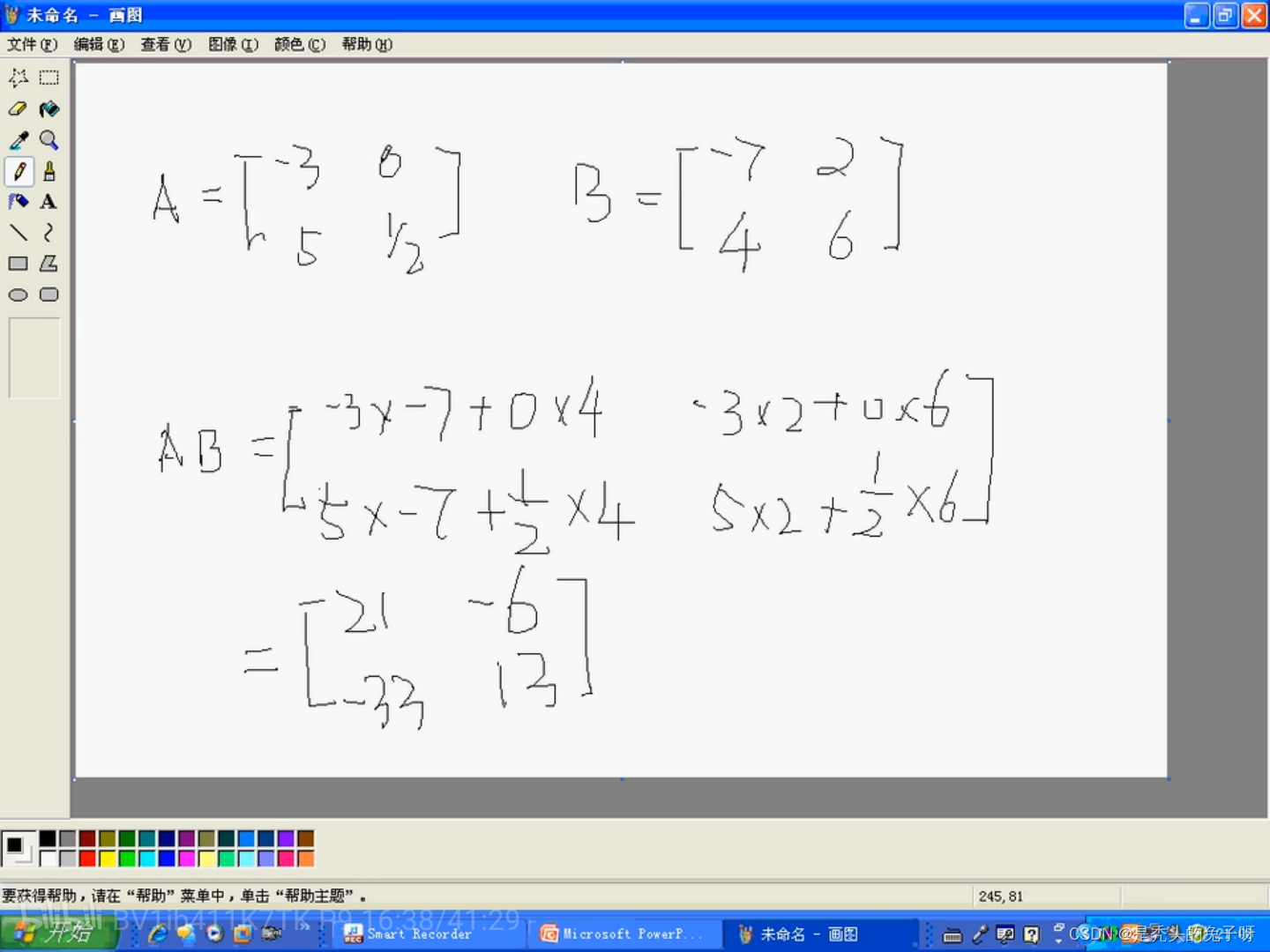
行对竖对应相乘相加
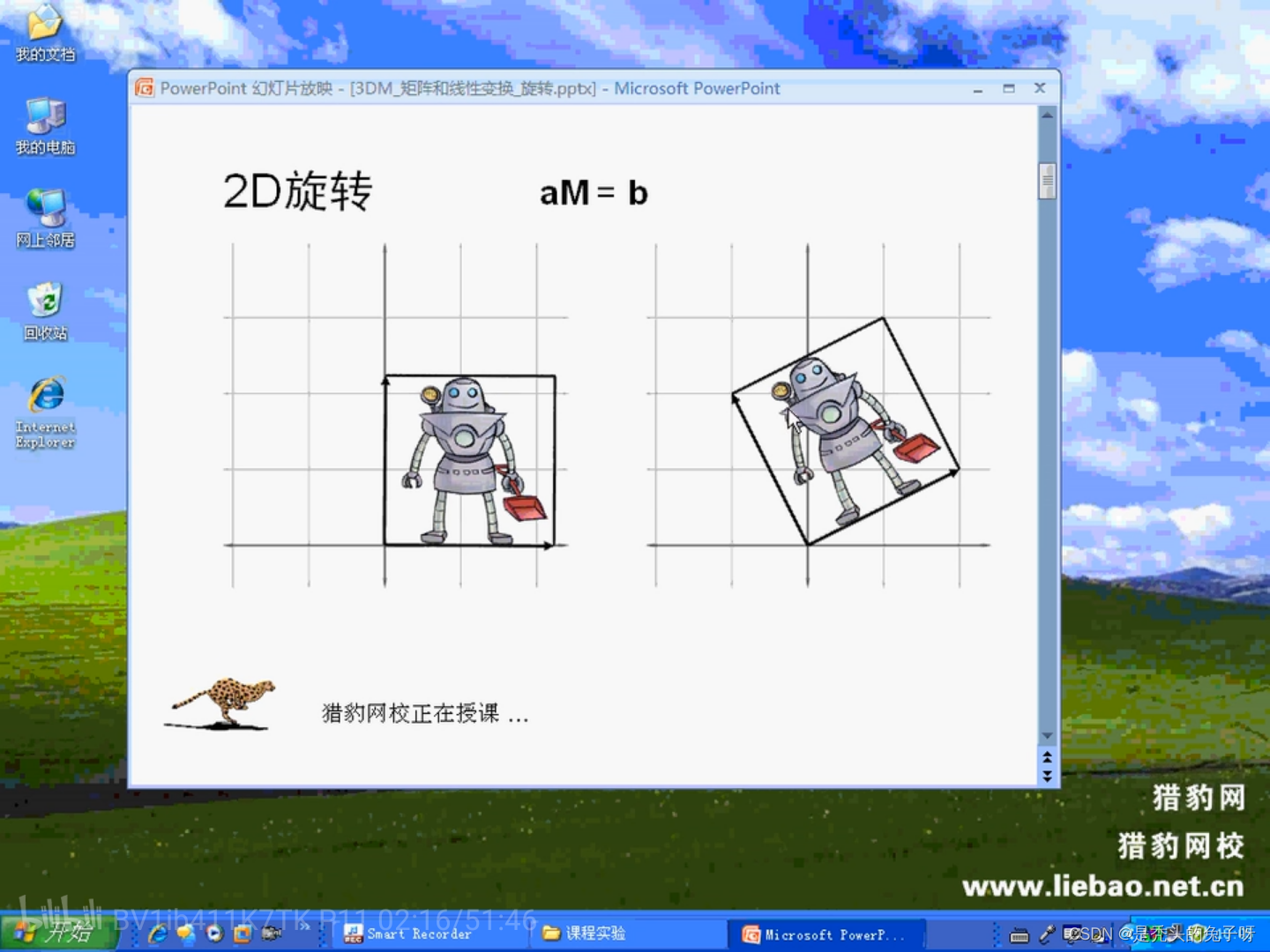
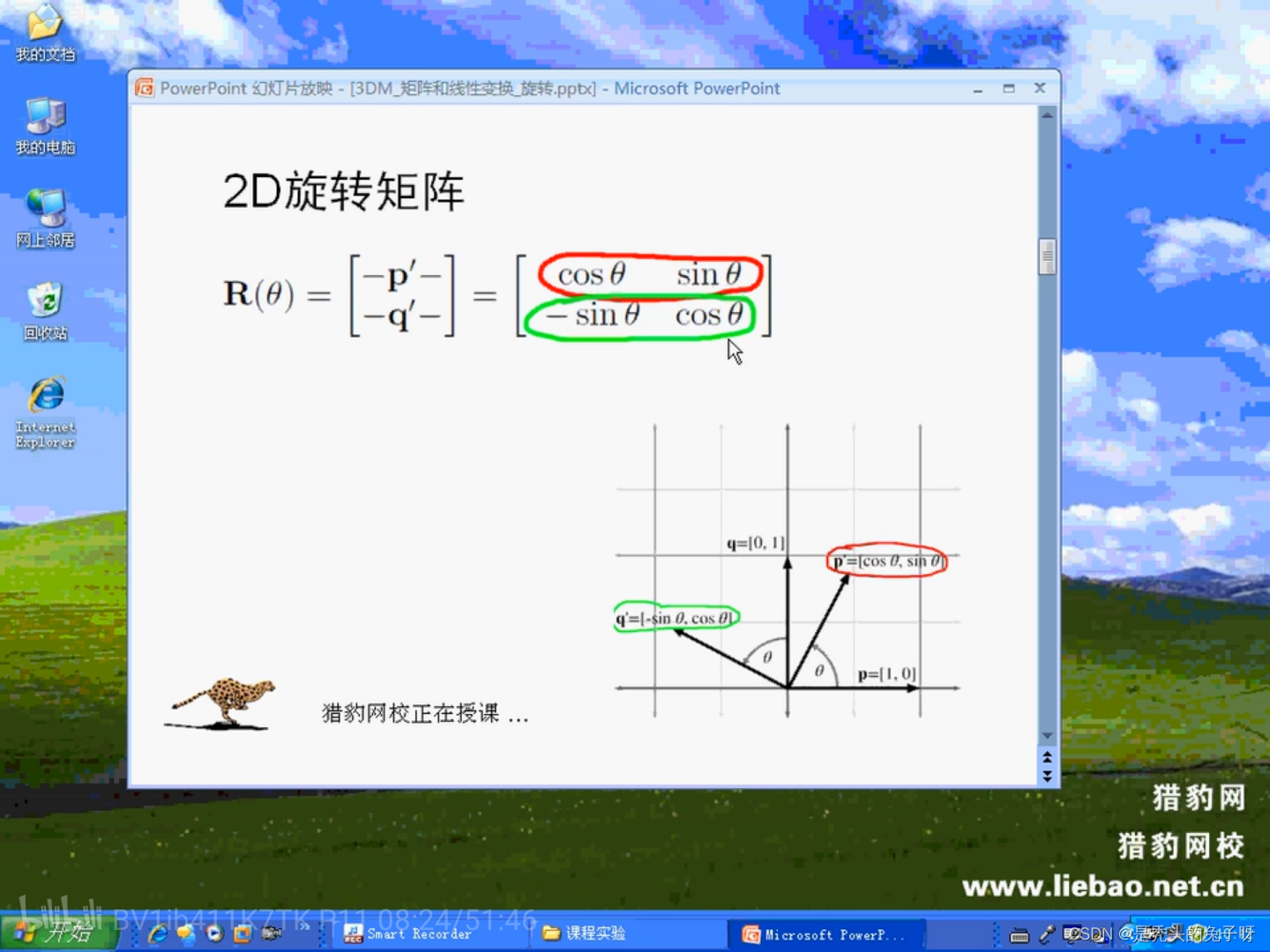
矩阵和线性变换:
1、旋转
绕X轴进行旋转:
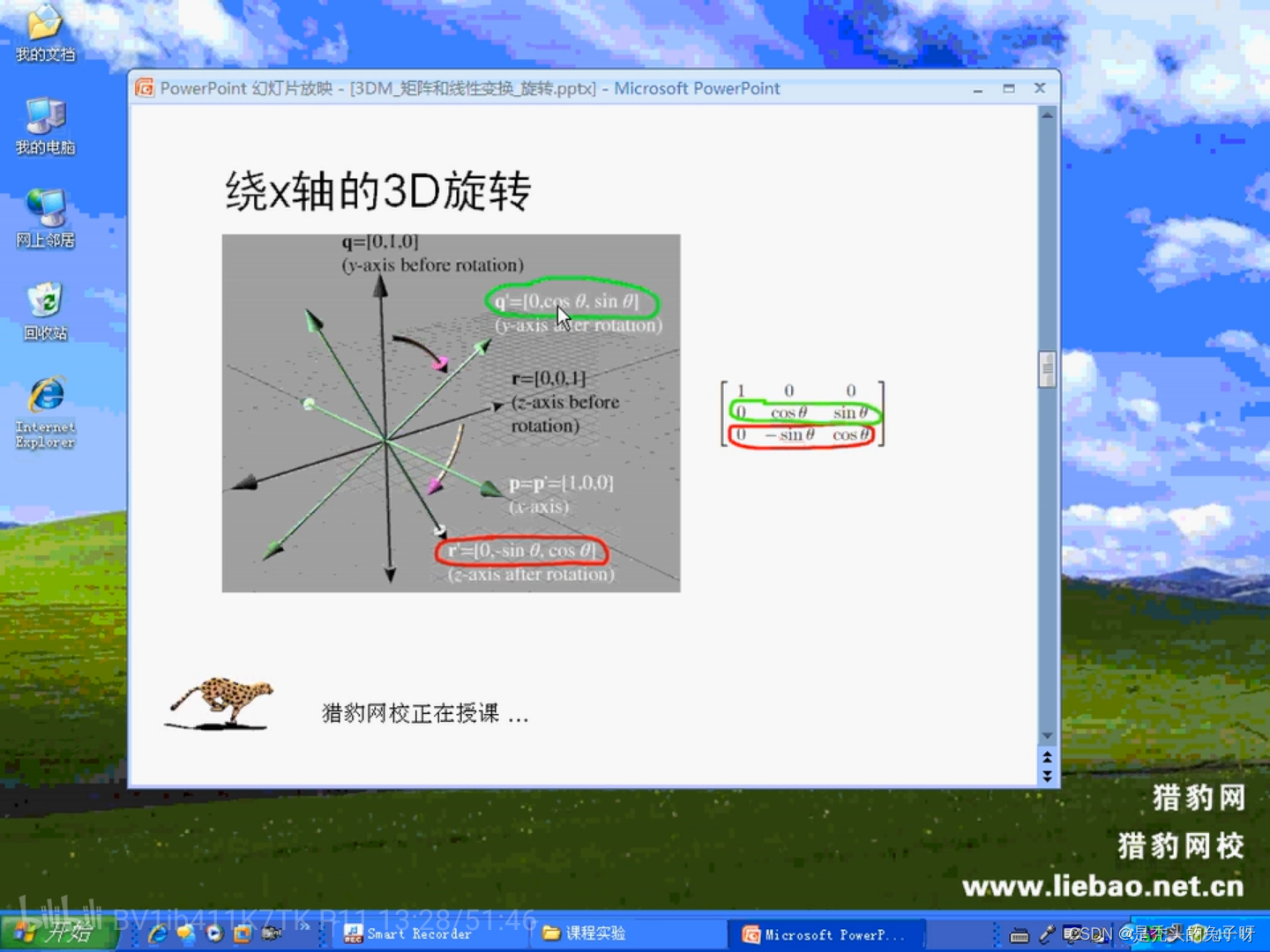
同理:
绕Y轴旋转:
[ COS, , -SIN ]
[ 0, 1, 0 ]
[ SIN, 0, COS ]
绕Z轴旋转:
[ COS, SIN, 0 ]
[ -SIN, COS, 0 ]
[ 0, 0, 1 ]
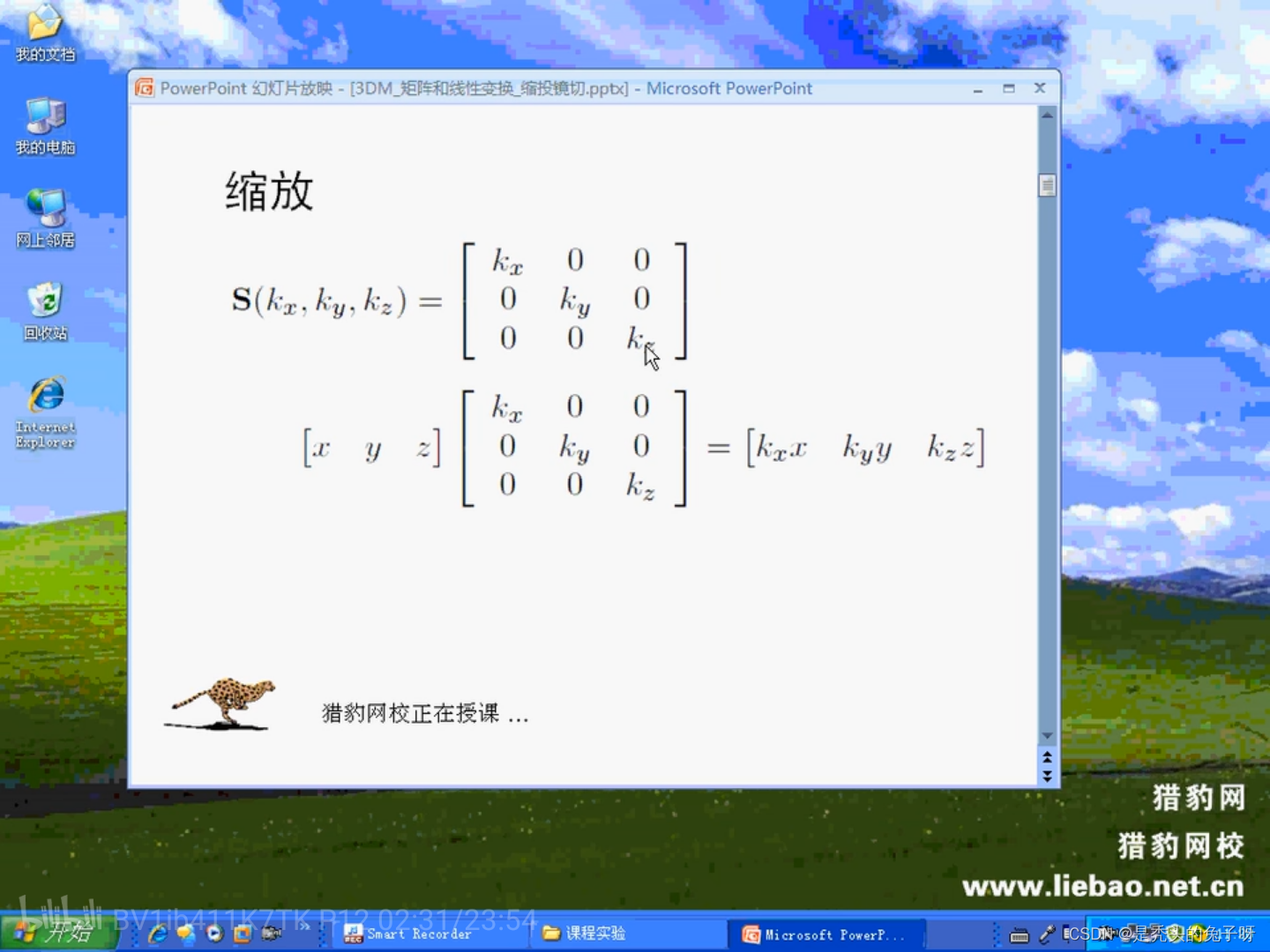
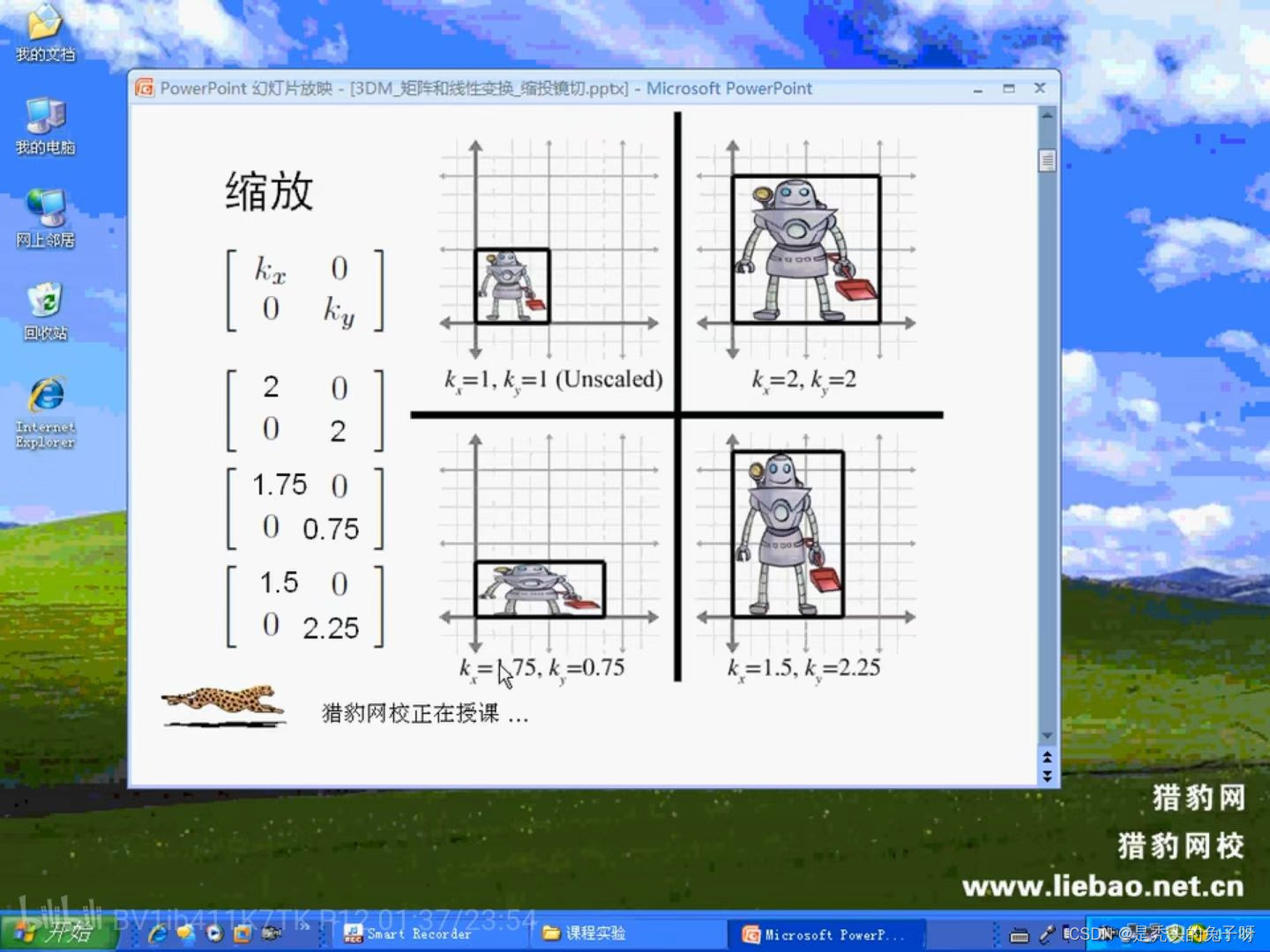
2、缩放
3、投影:
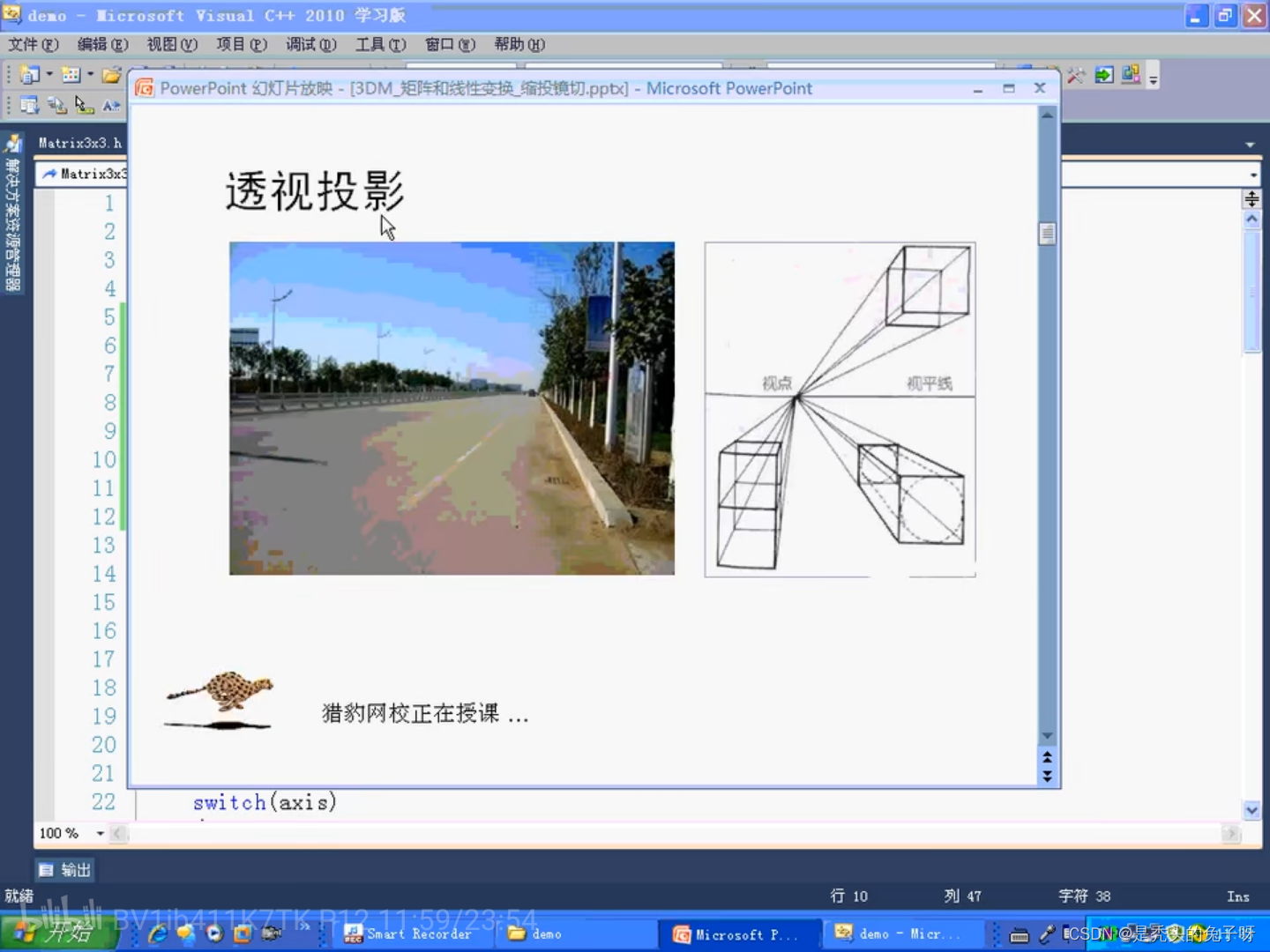
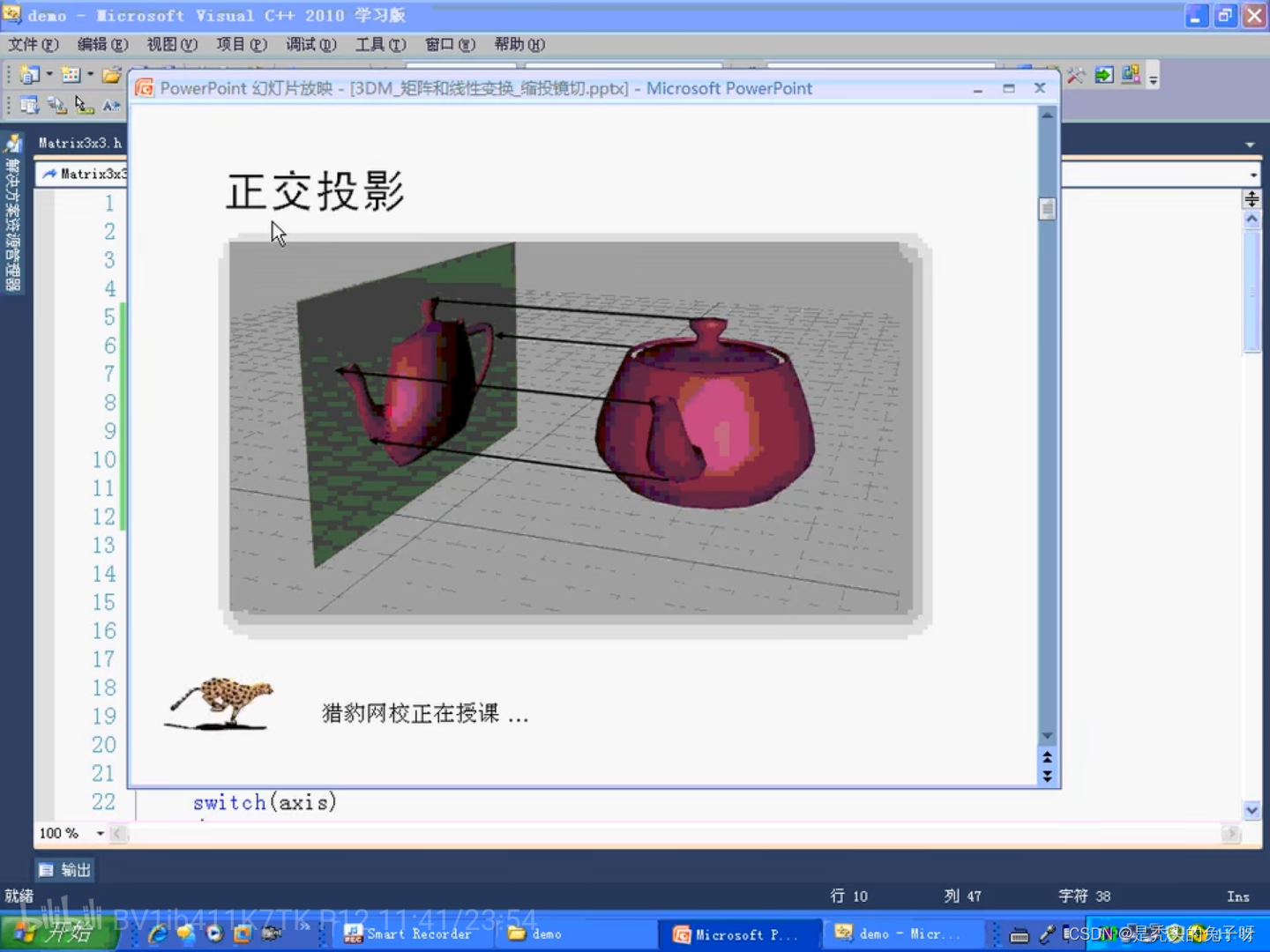
投影的本质就是从三维变成二维
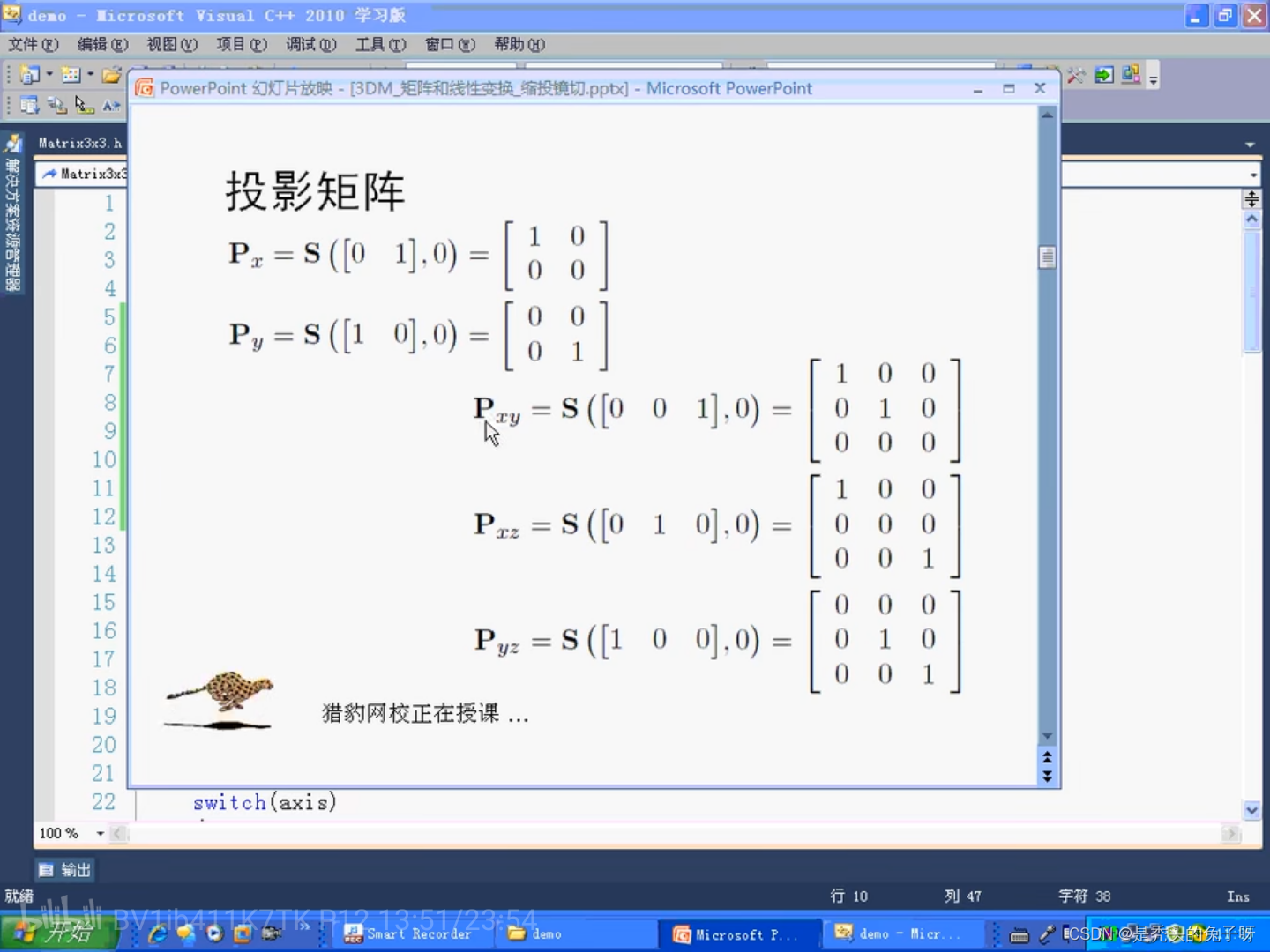
二维Px投影到X轴,其他轴就为0,同理二维投影到Y轴,X轴就全为0
三位投影,投影到XY轴,Z轴就全为0,同理...
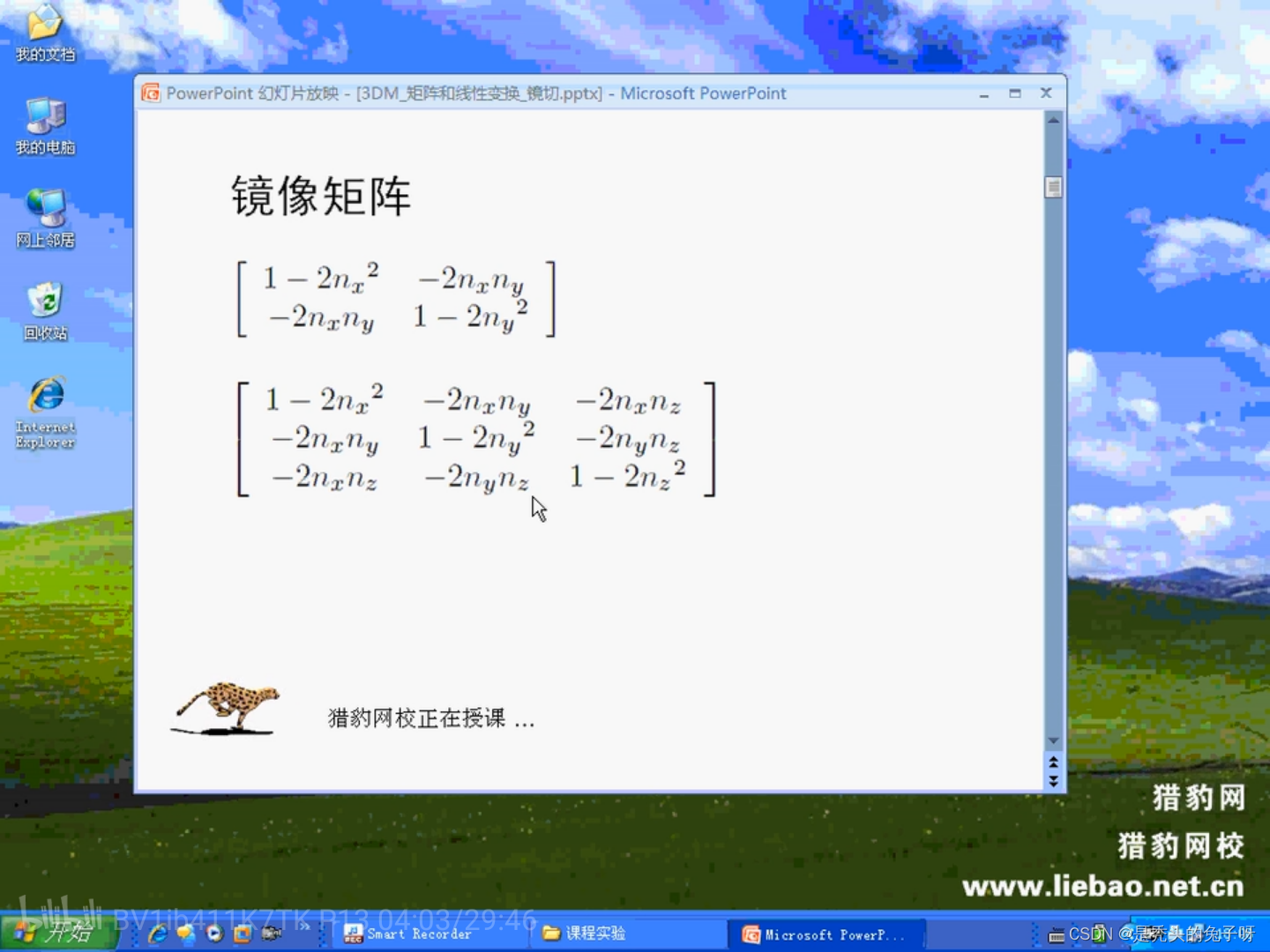
4、镜像:
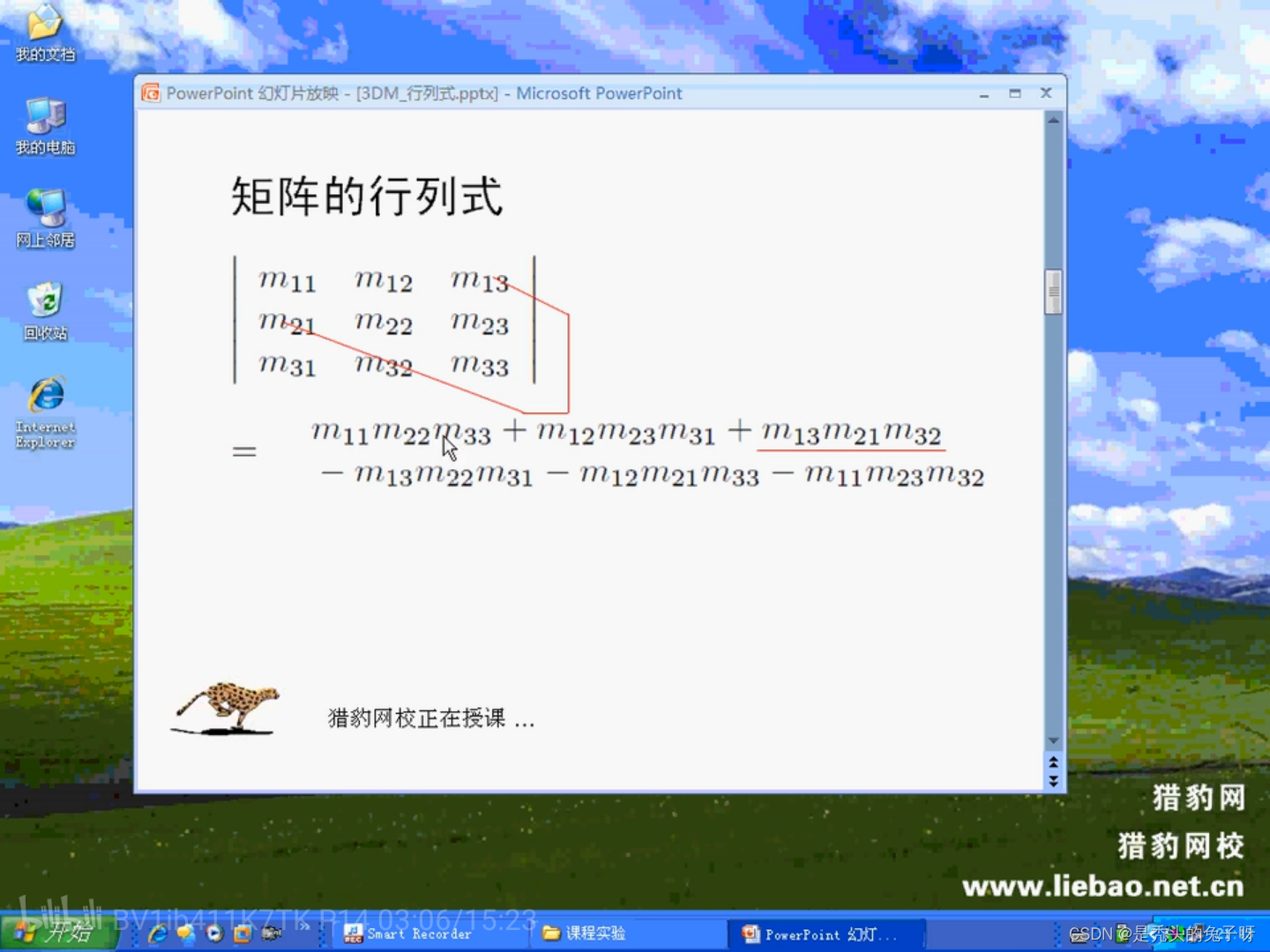
矩阵的行列式:
矩阵只有在方阵中才具有行列式(方阵:行数和列数相同的矩阵)
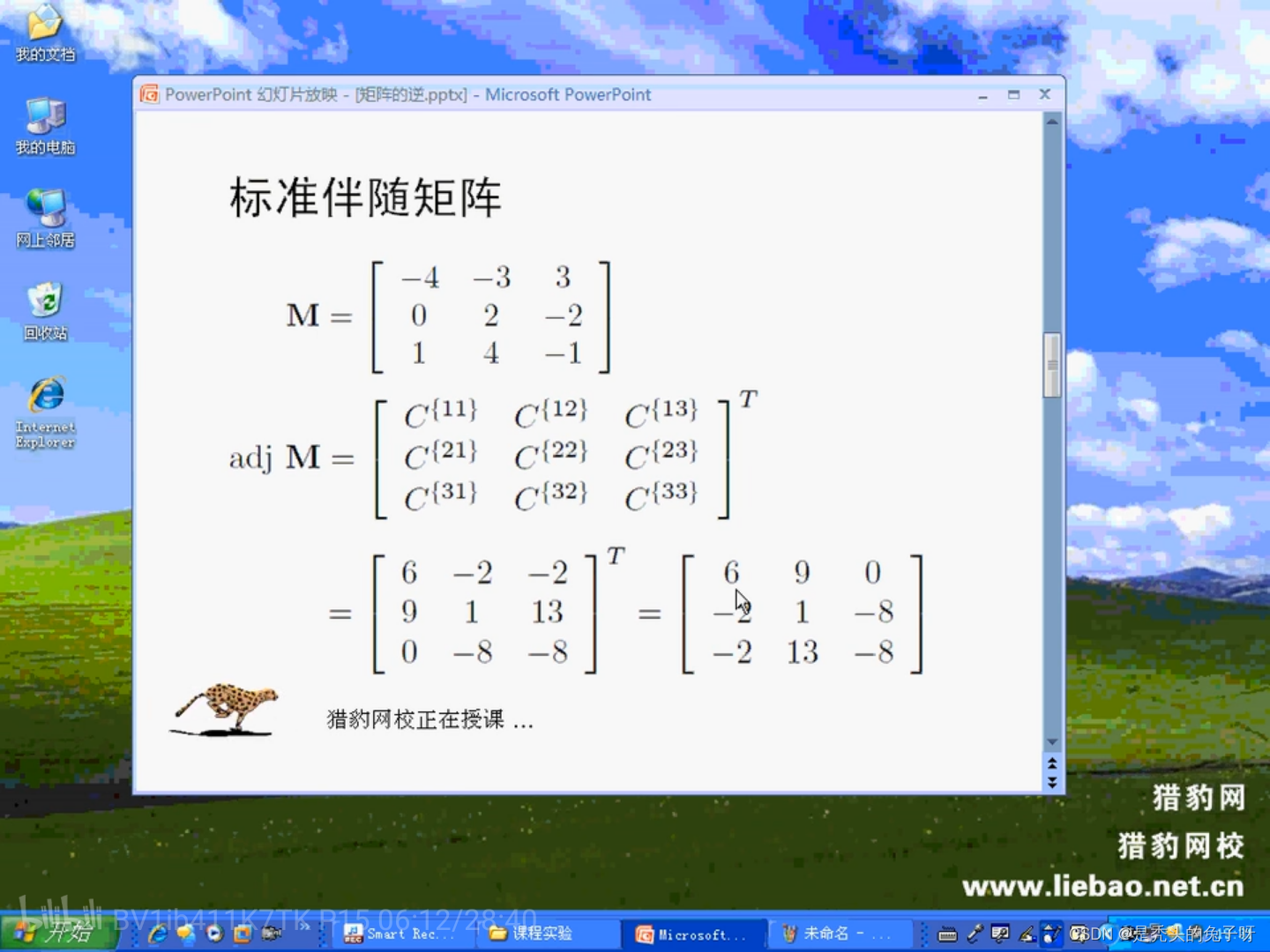
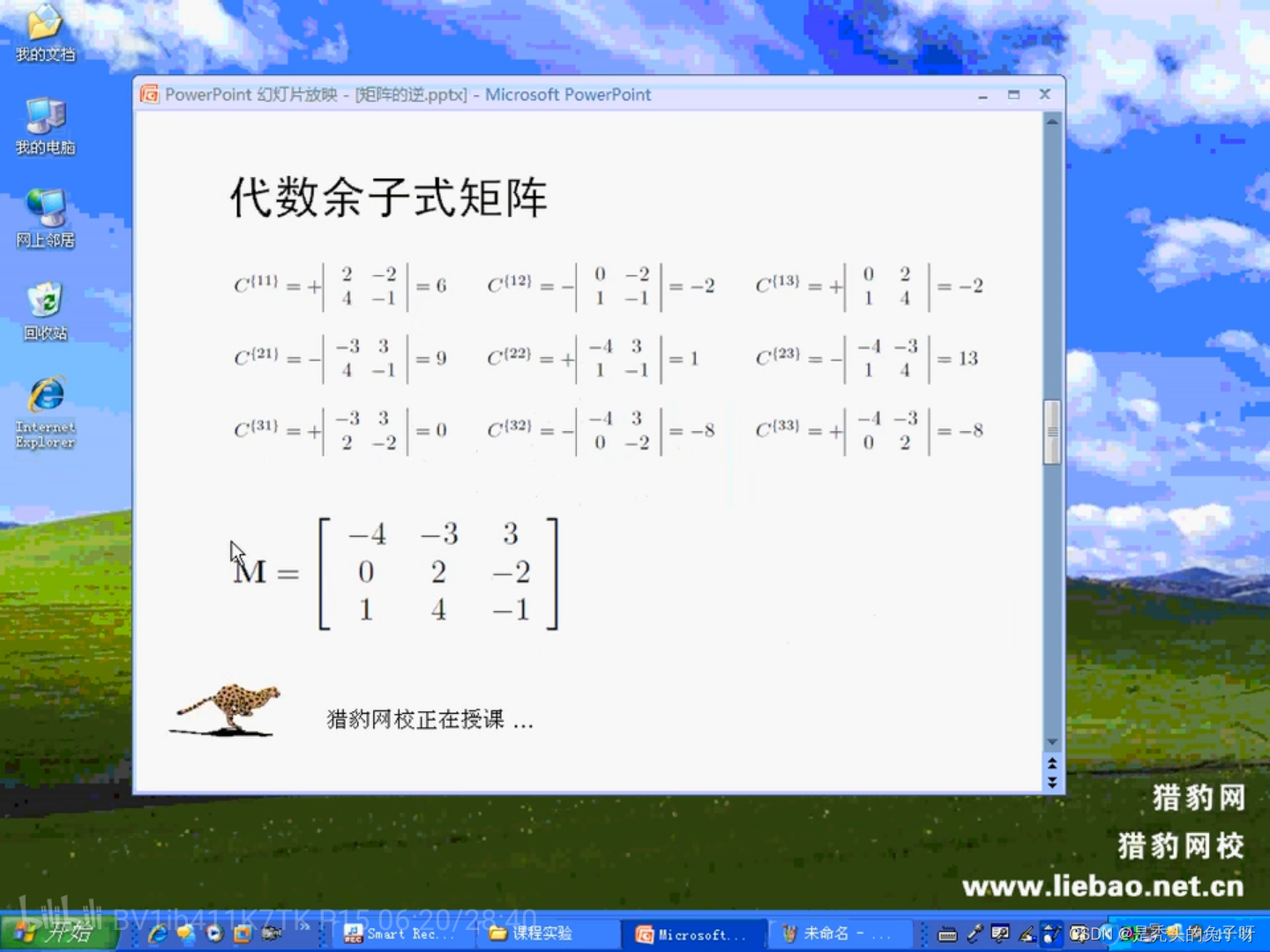
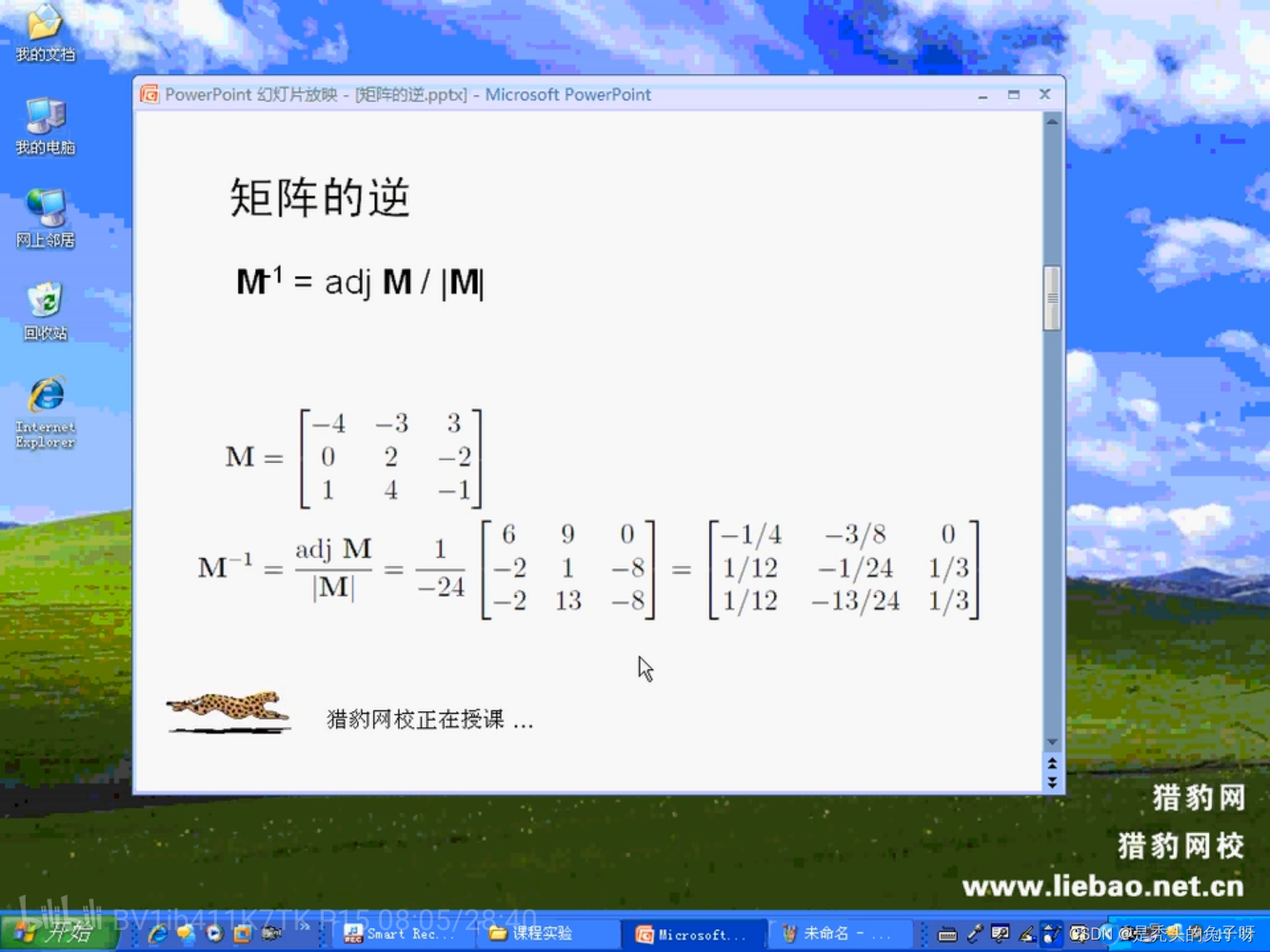
矩阵的逆:
奇异矩阵的行列式为0,奇异矩阵为不可逆矩阵
正交矩阵:
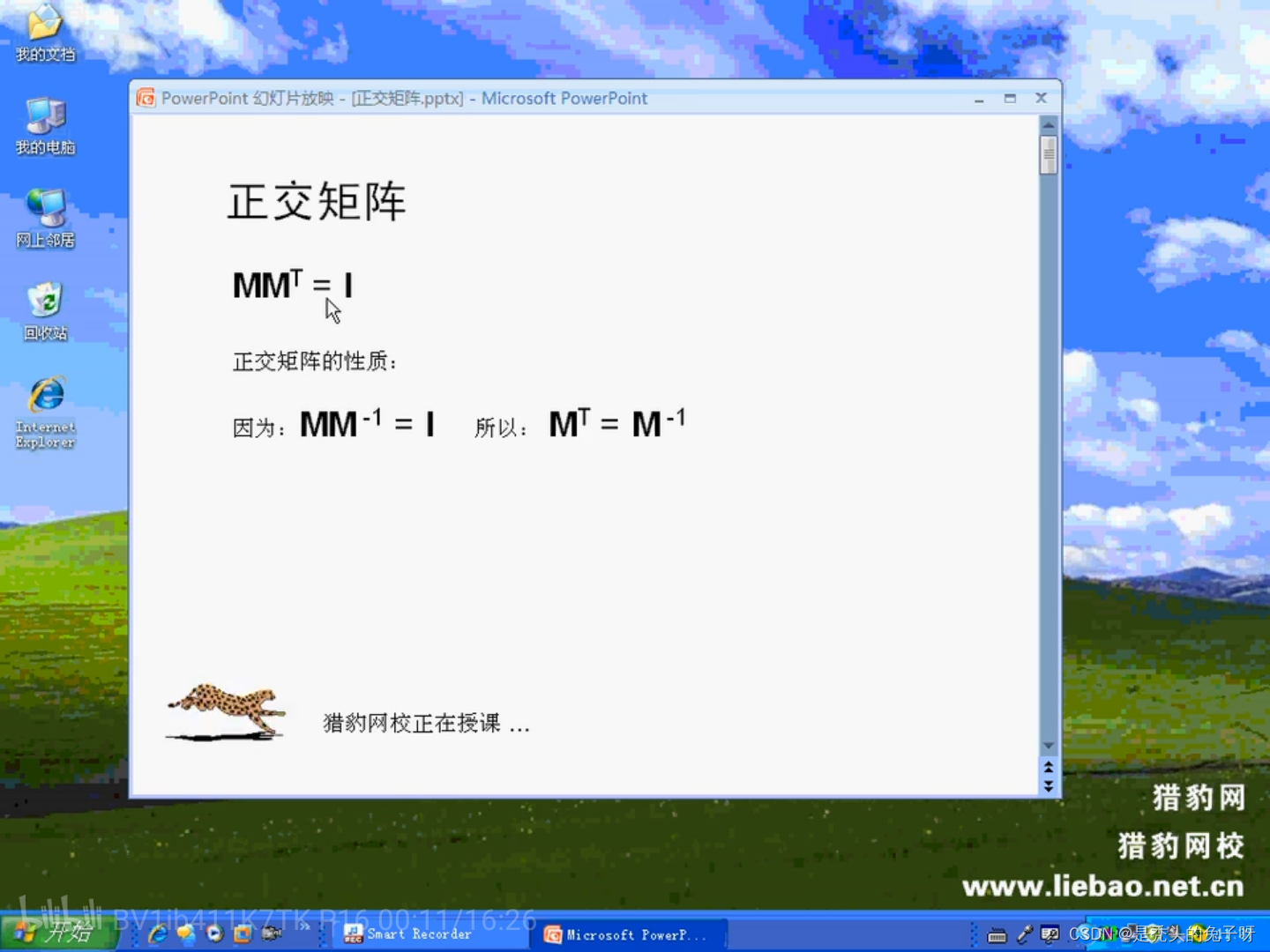
逆矩阵和转置矩阵相同的就是为正交矩阵
4*4齐次矩阵:
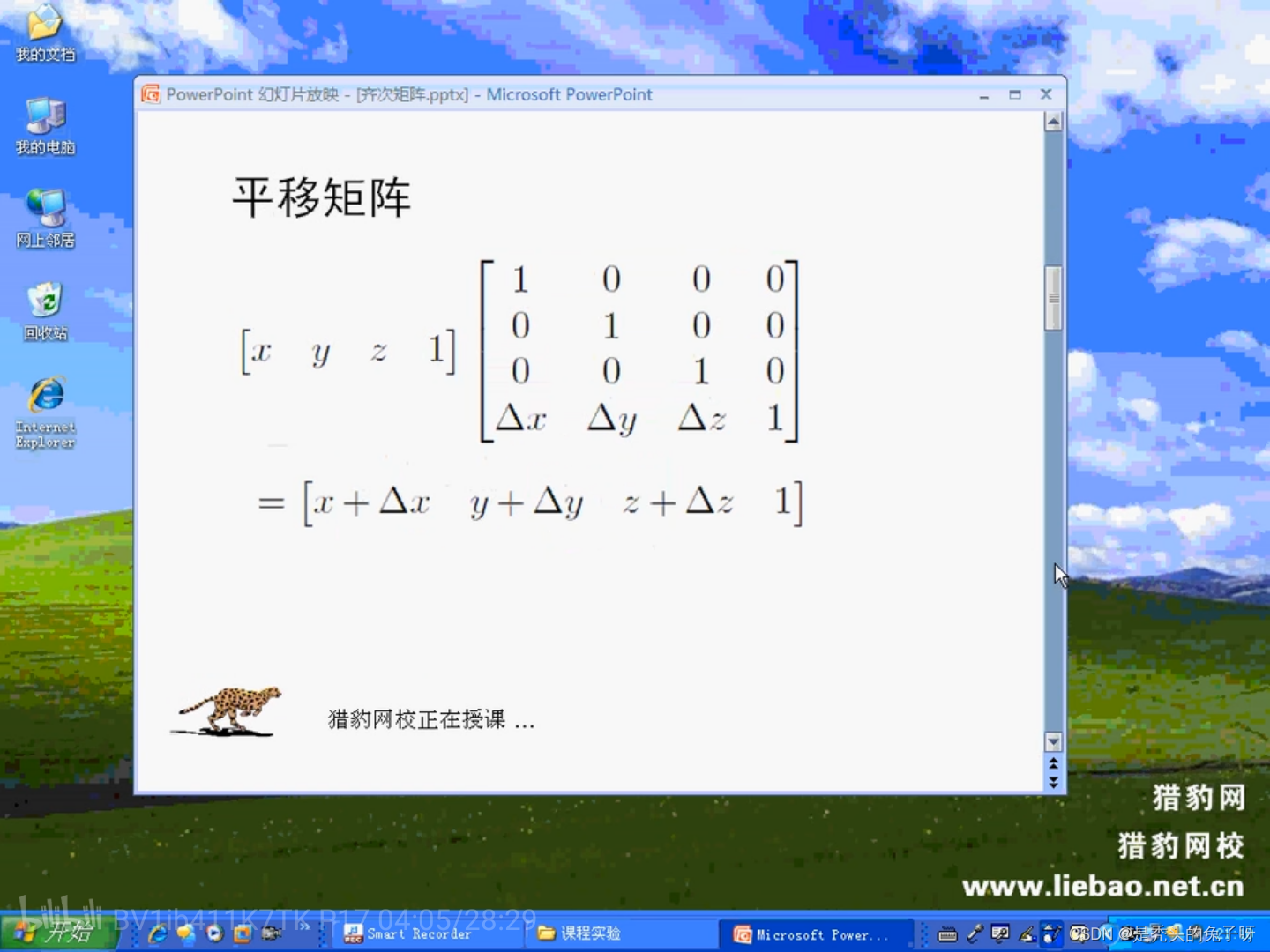
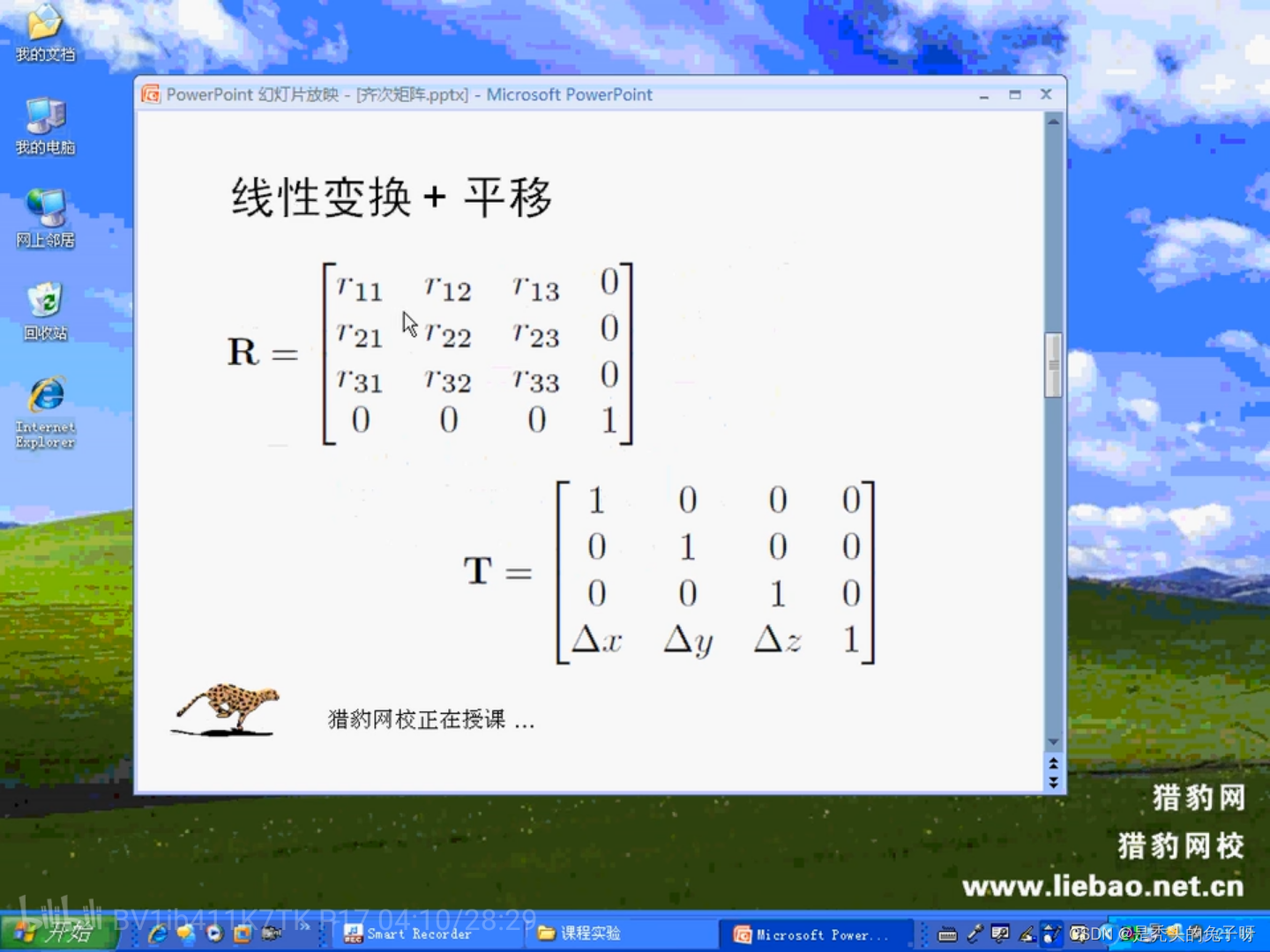
用一个矩阵做变换 + 平移






![[附源码]Nodejs计算机毕业设计教师业绩考核和职称评审系统Express(程序+LW)](https://img-blog.csdnimg.cn/d21daaa733bd450ba53ebb55fe0306bc.png)
![[附源码]Nodejs计算机毕业设计教务管理系统Express(程序+LW)](https://img-blog.csdnimg.cn/bdd7dc4dfd1d42c0be2c7586b6a6c623.png)