本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第20章 DAC输出模拟信号
本章目标
- 了解DAC基本概念和RA6M5处理器的DAC外设;
- 学会使用RASC配置DAC输出指定电压和正弦波形;
1.1 RA6M5的DAC
1.1.1 DAC简介
计算机里处理的都是数字0/1信号,而自然界几乎都是模拟信号,比如音频信号、无线传输信号等,这就要求计算机具有模拟信号的输出能力,将数字信号(离散信号)转换为模拟信号(连续信号)的器件就叫数模转换器(Digital-to-Analog Converter,DAC)。
按原理可分为:Nyquist型和过采样型。Nyquist型转换器按其结构又可大致分为电阻分压型、R_2R型、电荷分配型和电流驱动型。
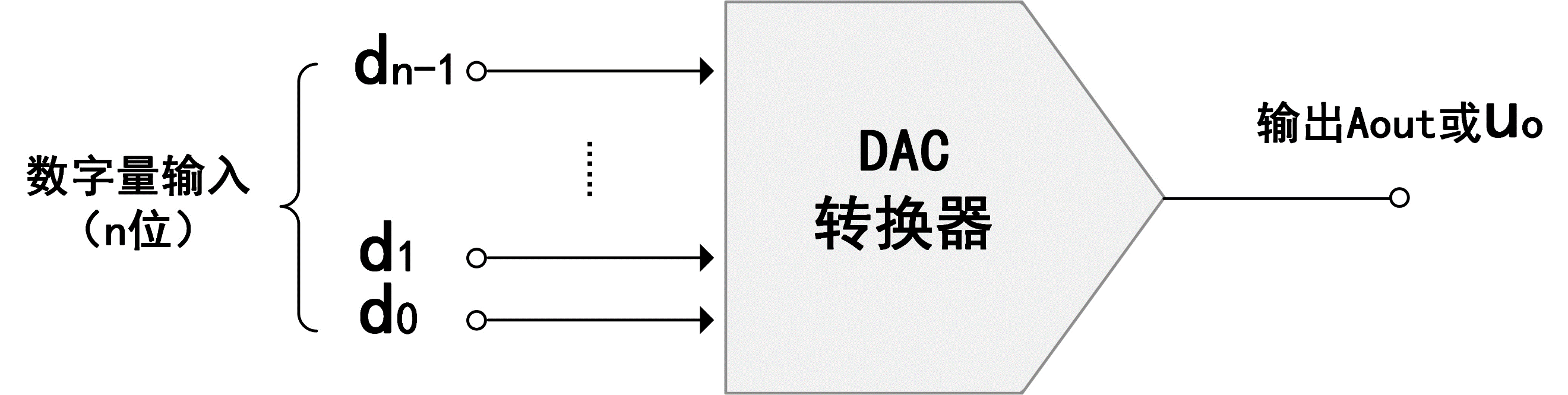
下图所示为DAC转换过程,输入的数字编码Din(dn1 : d0),按其权值大小转换成相应的模拟量并相加,相加的结果Aout与数字量Din成正比,即实现了D/A转换。
DAC的主要有三个性能指标:分辨率、建立时间和转换精度。
- 分辨率:指DAC能输出的最小变化量,通常使用二进制有效位表示,反应了DAC输出模拟量的最小变化值。当输出量程一定时,位数越多,量化单位越小,误差越小,分辨率越高。比如一个12位的DAC,参考电压为3.3V,则其能输出的最小电压为:

- 建立时间:指DAC从输入信号变化开始,到输出模拟信号达到满刻度值(±1/2LSB)所需时间。根据建立时间得长短,可以将DAC分为超高速(<1μS)、高速(101μS)、中速(10010μS)、低速(≥100μS)。
- 转换精度:指DAC输出的模拟电压实际值与理论值之间的偏差,通常为1个或半个最小数字量的变化量,表示为1LSB或1/2LSB。
20.1.2 RA6M5的DAC框图
RA6M5处理器的DAC硬件框图如下图所示:
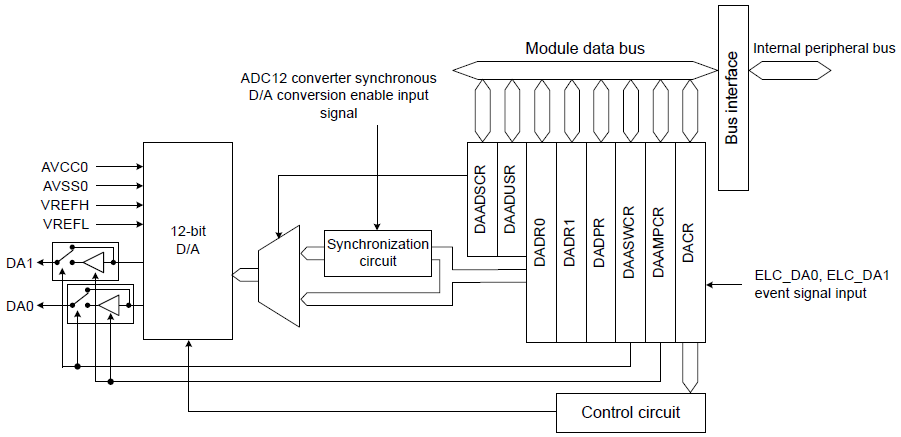
框图中的“12-bit D/A”是核心部件,整个DAC外设都是围绕着DA0通道和DA1通道展开的,左上作为参考电源以及模拟转换输出,右边有着相应的控制寄存器、总线接口、同步转换。
20.1.3 参考电压
AVCC0引脚作为ADC12和DAC12的电源输入引脚,AVSS0引脚作为ADC12和DAC12的接地输入引脚。VREFH引脚作为DAC12的模拟参考高电压电源引脚。VREFL引脚作为DAC12的模拟参考低电压引脚。
分别把它们接入到电源的正负两级,可以得到DAC的输出电压范围为:03.3V。如果想让输出的电压范围变宽,可以在外部加一个电压调节电路,把03.3V的DAC输出抬升到特定的范围即可。
在电路设计的时候不增加磁珠和电容接入到DAC12电源电路,会使得输出的电压不稳甚至输出的不是想要的电压,这个时候可以在电路上增加磁珠和电容来减少干扰,从而优化DAC比较电压源从而使其输出稳定。
20.1.4 触发源
可以设置软件来触发DAC,也可以通过使用ELC进行触发,还可以使用外部中断进行触发,最终目的是为了使得DACR.DAOEn(n=0,1)位被置1,可以编写相应的寄存器控制代码来使用不同的方式进行触发。
ELC也可以触发DAC转换,过程为:先设置ELSR12或ELSR13,选择“要连接的事件”,当连接的事件发生后,会使得DAC的寄存器DAOEi置1并开启DAC转换。ELSR12对应DAOE0即DAC0,ELSR13对应DAOE1即DAC1。
20.1.5 数据转换
1.DAC的数据寄存器
RA6M5处理器的DAC数据寄存器DADRn(n=0,1)是一个16bit的可读可写的寄存器,用来保存DAC的转换值。当开启了DA转换后,存储在此寄存器的值就会被转化为一个模拟量输出。
此16bit寄存器实际上只有低12bit被用来保存转换值,高4bit是无效的,因而DAC可以转换的数字量范围是0~4095。
保存在此寄存器的数值有两种对齐方式:左对齐或右对齐。默认是右对齐。
2.电压转换公式
DAC的转换出来的模拟量值是根据其转换精度和参考电压换算的,公式如下:

- DA转换时间
RA6M5处理器的DA转换时间在其数据手册中有说明,如下图所示:

是否使用DAC的放大器,输出的模拟量范围和转换时间是不同的:
- 使用放大器:输出模拟量电压范围在0~之间;DA转换时间最大3us;
- 用放大器:输出模拟量电压范围在0~之间;DA转换时间最大4us;
- DA转换过程
开启DAC任意通道的DA转换分为如下几步:
- 通过设置DADPR[DPSEL]位确定转换值是左对齐还是右对齐;
- 往寄存器DADRn写入数字值;
- 将DACR[DAOEn]位置1开启转换;
- 如果要进行多次转换,则在DACR[DAOEn]=1情况下,连续往DADRn寄存器写入值即可,转换时间为;
- 如果要停止转换,就将DAOEn写0;
20.2 DAC模块的使用
20.2.1 配置DAC模块
在RASC中配置DAC时,建议先配置DAC的通道的引脚,再去添加DAC的Stack模块并进行配置。
- 配置DAC通道引脚
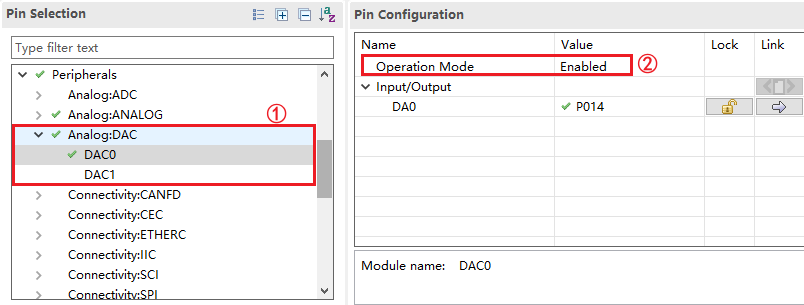
在RASC的“Pins”中的“Peripherals”选择“Analog:DAC”,根据硬件选择DAC通道,假设是DACO,那么则在右侧弹出的配置中将“Operation Mode”设置为“Enabled”,引脚只有一个P014。如果是DAC1,其引脚是P015。配置如下图所示:
- 配置DAC的Stack模块
在FSP的“Stacks”界面点击“New Stack”,选择“Analog”中的“DAC(r_dac)”,如下图所示:

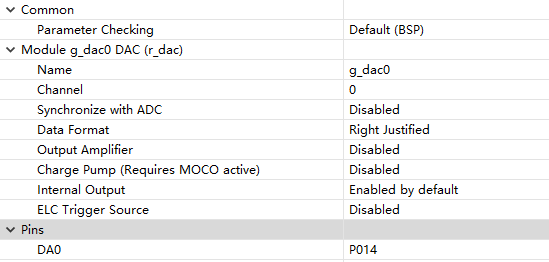
DAC的Stack模块分为3个板块:
- Common:对所有DAC外设Stack模块通用,DAC这里只有参数校验的使能或不使能,默认是不使能;
- Module:某个指定的DAC外设Stack模块参数配置,在里面设置DAC外设Stack的名称、通道、数据格式、放大器使能、触发源等参数;
- Pins:某个指定DAC外设的输出引脚
如下图所示:
配置好DAC的Stack参数后,点击FSP配置界面的“Generate Project Content”,使用RASC生成RA6M5处理器的Keil MDK工程。
20.2.2 配置信息解读
RASC生成的DAC配置信息有两种:引脚配置信息、DAC模块本身的配置信息。
- 引脚信息
该信息会在ra_gen\pin_data.c文件里生成。在RASC里配置的每一个引脚,都会在pin_data.c生成一个ioport_pin_cfg_t数组项,里面的内容跟配置时选择的参数一致。代码如下:
const ioport_pin_cfg_t g_bsp_pin_cfg_data[] = {
{.pin = BSP_IO_PORT_00_PIN_14,
.pin_cfg = ((uint32_t) IOPORT_CFG_ANALOG_ENABLE)
},
......(省略内容)
};
这里将P014引脚的配置设置为复用模拟功能。
- 块配置信息
DAC模块的配置信息在hal_data.c里,它是dac_cfg_t类型的结构体常量,名为g_dac0_cfg,代码如下:
const dac_cfg_t g_dac0_cfg =
{
.channel = 0,
.ad_da_synchronized = false,
.p_extend = &g_dac0_ext_cfg
};
- channels:DAC通道;
- ad_da_synchronized:是否和ADC同步转换
- p_extend:扩展的配置信息
对于p_extend,它被用来描述DAC的扩展配置参数,比如是否使用放大器、数据存放格式、是否使能内部输出等,结构体原型如下:
typedef struct st_dac_extended_cfg
{
bool enable_charge_pump; ///< Enable DAC charge pump available on selected MCUs.
bool output_amplifier_enabled; ///< Output amplifier enable available on selected MCUs.
bool internal_output_enabled; ///< Internal output enable available on selected MCUs.
dac_data_format_t data_format; ///< Data format
} dac_extended_cfg_t;
RASC生成的had_data.c中,定义了g_dac0_ext_cfg常量,代码如下:
const dac_extended_cfg_t g_dac0_ext_cfg =
{
.enable_charge_pump = 0,
.data_format = DAC_DATA_FORMAT_FLUSH_RIGHT,
.output_amplifier_enabled = 0,
.internal_output_enabled = false,
};
- DAC外设对象结构体
使用RASC配置生成的DAC外设对象,是一个dac_instance_t结构体类型常量,名为g_dac0表示,此结构体原型如下:
typedef struct st_dac_instance
{
dac_ctrl_t * p_ctrl; ///< Pointer to the control structure for this instance
dac_cfg_t const * p_cfg; ///< Pointer to the configuration structure for this instance
dac_api_t const * p_api; ///< Pointer to the API structure for this instance
} dac_instance_t;
g_dac0定义如下:
typedef struct st_dac_instance
{
dac_ctrl_t * p_ctrl; ///< Pointer to the control structure for this instance
dac_cfg_t const * p_cfg; ///< Pointer to the configuration structure for this instance
dac_api_t const * p_api; ///< Pointer to the API structure for this instance
} dac_instance_t;
g_dac0定义如下:
const dac_instance_t g_dac0 =
{
.p_ctrl = &g_dac0_ctrl,
.p_cfg = &g_dac0_cfg,
.p_api = &g_dac_on_dac
};
- p_ctrl:控制参数,用来记录一些状态信息;
- p_cfg:DAC的配置参数;
- p_api:DAC的接口,它是一个dac_api_t指针,指向g_dac_on_dac;
20.2.3API 接口及其用法
DAC的API在dac_api_t结构体中指明,此结构体的原型如下:
typedef struct st_dac_api
{
fsp_err_t (* open)(dac_ctrl_t * const p_ctrl, dac_cfg_t const * const p_cfg
fsp_err_t (* close)(dac_ctrl_t * const p_ctrl);
fsp_err_t (* write)(dac_ctrl_t * const p_ctrl, uint16_t value
fsp_err_t (* start)(dac_ctrl_t * const p_ctrl);
fsp_err_t (* stop)(dac_ctrl_t * const p_ctrl);
} dac_api_t;
在r_dac.c中实现了一个dac_api_t结构体,代码如下:
const dac_api_t g_dac_on_dac =
{
.open = R_DAC_Open,
.write = R_DAC_Write,
.start = R_DAC_Start,
.stop = R_DAC_Stop,
.close = R_DAC_Close,
};
下面介绍这些函数进行介绍,并举例。
- 打开DAC设备
fsp_err_t (* open)(dac_ctrl_t * const p_ctrl, dac_cfg_t const * const p_cfg);
此函数会初始化DAC设备,用户可以参考如下代码:
fsp_err_t err = g_dac0.p_api->open(g_dac0.p_ctrl, g_dac0.p_cfg);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
- 写入DAC转换数字量值
fsp_err_t (* write)(dac_ctrl_t * const p_ctrl, uint16_t value);
此函数会将value写入到DAC的DADR寄存器中,如果开启了DAC转换,会立刻进行DAC转换,并把模拟信号输出到DAC引脚上。
用户可以参考如下代码使用此函数:
fsp_err_t err = g_dac0.p_api->write(g_dac0.p_ctrl, value);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
- 开启和停止转换
- 开启转换
fsp_err_t (* start)(dac_ctrl_t * const p_ctrl);
- 停止转换
fsp_err_t (* stop)(dac_ctrl_t * const p_ctrl);
只要用户调用start函数开启DAC的转换,每次调用write写入数字量的时候,就会立刻开始转换为模拟量。
用户可以参考如下代码开启DAC转换(停止转换类似):
fsp_err_t err = g_dac0.p_api->start(g_dac0.p_ctrl);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
- 关闭DAC设备
fsp_err_t (* close)(dac_ctrl_t * const p_ctrl);
此函数关闭DAC的转换,如果使用了放大器还会失能放大器,并且将DAC的状态标志改为关闭状态。
20.3 DAC控制实现呼吸灯
20.3.1 设计目的
使用DAC输出线性电压改变LED亮度,从而实现呼吸灯效果。
0.3.2 硬件连接
配套开发板的P014没有连接外接电路,用户可以参考下图,使用杜邦线和洞洞板搭建控制电路:

电阻阻值在1kΩ~10kΩ即可,LED颜色任意,建议选择变化明显容易观察的、较深的颜色。
20.3.3 驱动程序
1.DAC设备对象抽象
RA6M5处理器有两个硬件DAC,基于面向对象的编程思想,对DAC设备进行了抽象,定义了如下结构体:
typedef struct DACDev{
char *name;
unsigned char channel;
void (*Init)(struct DACDev *ptDev);
void (*SetValue)(struct DACDev *ptDev, unsigned short value);
void (*Write)(struct DACDev *ptDev, unsigned short *buf, unsigned short len);
}DACDevTypeDef;
然后在驱动程序中实现结构体中的3个函数,并用来初始化一个DACDev结构体,代码如下:
static void DACDrvInit(struct DACDev *ptDev);
static void DACDrvSetValue(struct DACDev *ptDev, unsigned short value);
static void DACDrvWrite(struct DACDev *ptDev, unsigned short *buf, unsigned short len);
static struct DACDev gDACDev0 = {
.name = "DAC0",
.channel = 1,
.Init = DACDrvInit,
.SetValue = DACDrvSetValue,
.Write = DACDrvWrite
};
- 第01~03行:声明内部静态驱动函数;
- 第05~11行:构造DACDev结构体
还提供如下函数,供用户获得这个DACDev结构体:
struct DACDev *DACDrvGetDevice(void)
{
return &gDACDev0;
}
- 初始化
打开DAC设备、启动DAC转换,代码如下:
static void DACDrvInit(struct DACDev *ptDev)
{
if(NULL == ptDev) return;
if(1 == ptDev->channel)
{
fsp_err_t err = g_dac0.p_api->open(g_dac0.p_ctrl, g_dac0.p_cfg);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
err = g_dac0.p_api->start(g_dac0.p_ctrl);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
}
}
- 第06行:打开DAC设备,完成DAC0的初始化;
- 第12行:开启DAC的转换,之后只要调用write函数即可不断进行DA转换;
- 单次输出模拟量
由于FSP的DAC库函数对于写入数值只有一个write函数,因而单次输出模拟量其实就是对write的封装:
static void DACDrvSetValue(struct DACDev *ptDev, unsigned short value)
{
if(NULL == ptDev) return;
if(1 == ptDev->channel)
{
fsp_err_t err = g_dac0.p_api->write(g_dac0.p_ctrl, value);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
}
}
- 连续输出模拟量
连续输出相较于单次输出,差别仅在于输出多个模拟量,是对write的不同方式的封装而已:
static void DACDrvWrite(struct DACDev *ptDev, unsigned short *buf, unsigned short len)
{
if(NULL == ptDev) return;
if(1 == ptDev->channel)
{
for(unsigned int i=0; i<len; i++)
{
fsp_err_t err = g_dac0.p_api->write(g_dac0.p_ctrl, buf[i]);
if(FSP_SUCCESS != err)
{
printf("Function:%s\tLine:%d\r\n", __FUNCTION__, __LINE__);
return;
}
}
}
}
20.3.4 测试程序
使LED要呈现呼吸灯的效果,其实让LED的驱动电压有规律地递增或递减:

因而可以使用单次输出模拟量的方法,每隔一段时间输出一个递增变化的模拟量。测试代码如下:
void DACAppTest(void)
{
SystickInit();
UARTDrvInit();
DACDevTypeDef *ptDacDev = DACDrvGetDevice();
if(NULL == ptDacDev)
{
printf("Error. Can not get DAC device!\r\n");
return;
}
printf("Success to get device: %s\r\n", ptDacDev->name);
ptDacDev->Init(ptDacDev);
bool dir = false;
volatile uint16_t value = 0;
while(1)
{
if(value==0)
dir = true;
else if(value==4096)
dir = false;
if(dir)
value += 4;
else
value -= 4;
ptDacDev->SetValue(ptDacDev, value);
HAL_Delay(1);
}
}
- 第05行:获取指定的DAC设备;
- 第13行:初始化DAC设备;
- 第20~23行:根据数据的边际判断输出的数据是该递增还是递减;
- 第25~28行:输出的数字量每次递增或递减4个数字量;
- 第29行:将变化后的数字量写入到DAC的数据寄存器中;
- 第30行:每隔1ms数据递增或递减一次;
为什么每次的变化量是4呢?根据呼吸灯的效果,设计逐渐变亮或变暗的时间周期为1.5s为佳,而DAC的数字量范围是0~4095,也就是4096个数字量,每隔1ms变化一次输出的数字量的话,为了接近1.5s的周期,且得到一个整数的数字量,每次变化4个单位是最科学的。
20.3.5 测试结果
用户可以使用示波器测试引脚P014的波形查看是否为一个线性变化的三角波,同时查看LED,可以观察到一个呼吸灯的效果。
20.4 DAC输出正弦波实验
20.4.1 设计目的
使用DAC输出一个幅度为3.3V,周期为192us的正弦波。
20.4.2 正弦波数据的生成
本书使用的是python脚本生成的正弦波数据,截取了其中一段正弦波数据,python脚本代码如下:
import os
import numpy as np
import matplotlib.pyplot as plt
def sin_wave(A, f, fs, phi, t):
'''
:params A: 振幅
:params f: 信号频率
:params fs: 采样频率
:params phi: 相位
:params t: 时间长度
'''
# 若时间序列长度为 t=1s,
# 采样频率 fs=1000 Hz, 则采样时间间隔 Ts=1/fs=0.001s
# 对于时间序列采样点个数为 n=t/Ts=1/0.001=1000, 即有1000个点,每个点间隔为 Ts
Ts = 1/fs
n = t / Ts
n = np.arange(n)
y = A*np.sin(2*np.pi*f*n*Ts - phi*(np.pi/180))
return y
# f=50 hz
fs = 256
dat = sin_wave(A=2048, f=4, fs=fs, phi=0, t=1) + 2048
dat = np.trunc(dat)
data = dat[48:48+64]
x = "const uint16_t sin[] ={ \n"
for i in range(int(data.size/16)):
for j in range(16):
str = '0x{:04x}'.format(int(data[i*16+j]))
x = x + str + ","
x = x + "\n"
x = x + "};"
f = open("sine.c", "w")
f.write(x)
f.close()
python不是本书讲解的对象,因而不对此段代码做分析,请读者自行学习分析。
20.4.3 驱动程序
驱动程序实际上使用的还是上一小节的那些函数和DAC设备对象,这里不再赘述,将上一小节的代码一直到本小节的实验中即可。
20.4.4 测试程序
本小节输出正弦波的方法是让DAC输出一段固定的正弦波数据,因而使用到的将会是DAC设备对象的连续输出模拟量的那一个函数,示例代码如下所示:
const uint16_t sine[] ={
......(数据省略)
};
void DACAppTest(void)
{
SystickInit();
UARTDrvInit();
DACDevTypeDef *ptDacDev = DACDrvGetDevice();
if(NULL == ptDacDev)
{
printf("Error. Can not get DAC device!\r\n");
return;
}
printf("Success to get device: %s\r\n", ptDacDev->name);
ptDacDev->Init(ptDacDev);
while(1)
{
ptDacDev->Write(ptDacDev, (uint16_t*)sine, 256);
}
}
- 第01~03行:python生成的正弦波数据;
- 第21行:使用DAC设备对象连续输出函数将正弦波数据转化为模拟量输出到引脚;
如果输出正弦波数据的时候,每个数据的输出间隔设计合适,输出正弦波也是能够实现呼吸灯效果的,读者可以自行尝试。
20.4.5 测试结果
使用示波器观察引脚P014的波形可以看到一个周期为192us,幅度为3.3V的正弦波。