1,会科学上网
2,
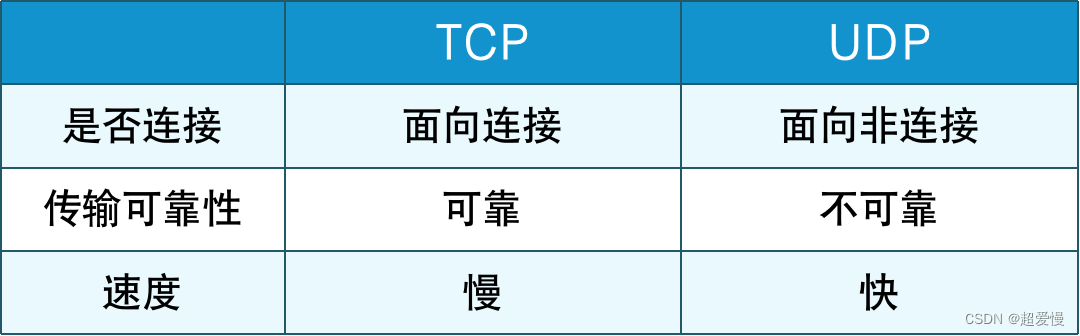
# Modbus TCP
rosdep install robotiq_modbus_tcp
3,报错
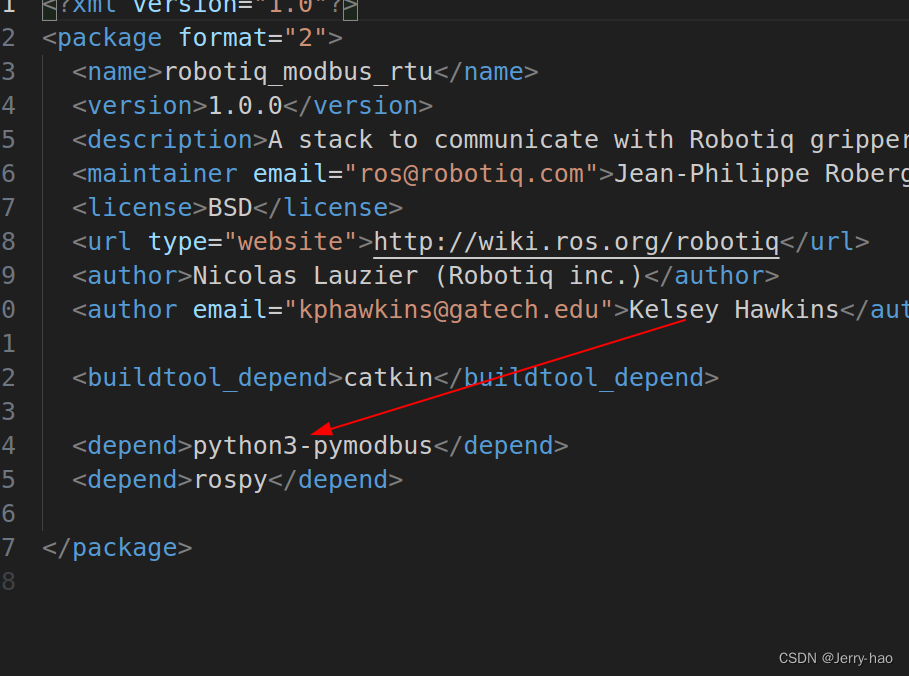
4,去robotiq的功能包里面找两个大爷(tmd)
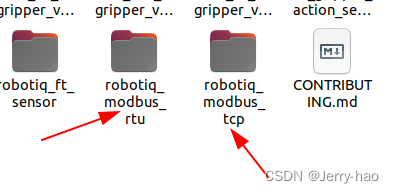
分别修改package.xml

本来是python , 然后分别修改成python3
然后参考其他博主的继续操作
UR机械臂学习(6):使用robotiq二指夹爪_robotiq夹爪怎么连接电脑端_冰激凌啊的博客-CSDN博客
ubuntu20系统+RobotiQ 2F-85夹爪+Ros+VMware配置_晓梦清尘的博客-CSDN博客





![java八股文面试[数据库]——JOIN优化](https://img-blog.csdnimg.cn/img_convert/f335b7779373f56acb2b278b55ee6343.png)