文章目录
- FPGA控制RGB灯WS2812B
- 1、简介
- 1.1水一水
- 1.2程序完成目标
- 1.3项目工程结构
- 2、代码
- 3、仿真代码
- 4、结果展示
FPGA控制RGB灯WS2812B
1、简介
1.1水一水
最近在学习WS2812B手册,是一个简单的协议编写,做的时间也算是比较久,相对做出了一个较为完善的结果,在此作为分享
想查看协议的可以去到下列链接:
主要特点 (semiee.com)
1.2程序完成目标
1、有多种模式,按下按键key[0],切换模式
2、实现灯闪烁的速度核亮度的控制
3、实现动态显示FPGA四个字符
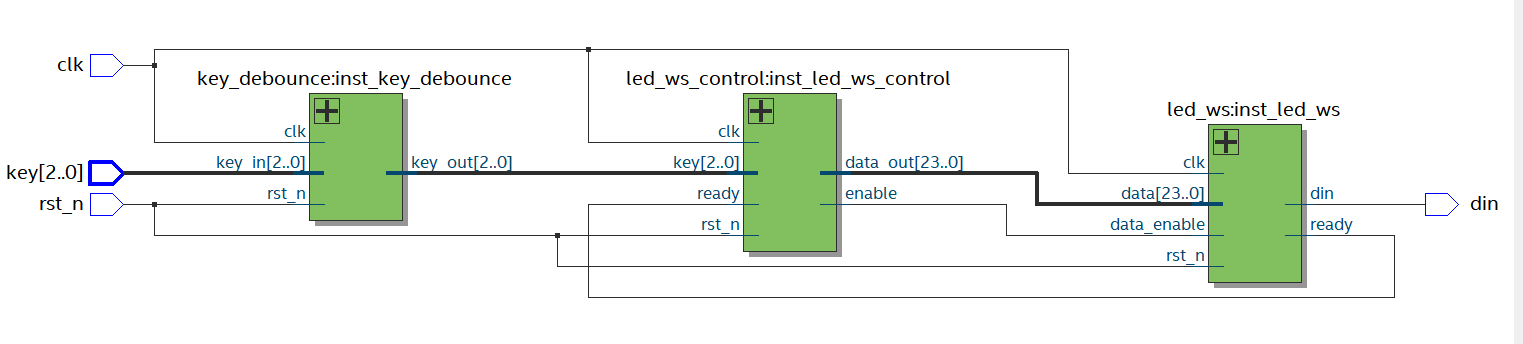
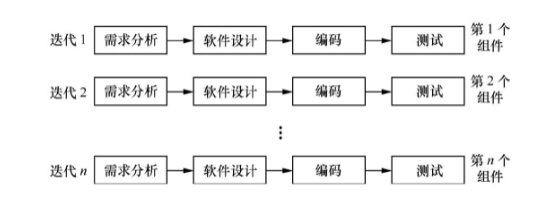
1.3项目工程结构
2、代码
顶层模块:
module top(
input wire clk,
input wire rst_n,
input wire[2:0] key,
output wire din
);
wire ready_r;
wire enbale;
wire[2:0] key_r;
wire[23:0] data;
led_ws_control inst_led_ws_control (
.clk (clk),
.rst_n (rst_n),
.ready (ready_r),
.key (key_r),
.enable (enable),
.data_out (data)
);
led_ws inst_led_ws (
.clk (clk),
.rst_n (rst_n),
.data_enable (enable),
.data (data),
.ready (ready_r),
.din (din)
);
key_debounce #(
.N(3)
) inst_key_debounce (
.clk (clk),
.rst_n (rst_n),
.key_in (key),
.key_out (key_r)
);
endmodule
按键消抖模块:
// -----------------------------------------------------------------------------
// Copyright (c) 2014-2023 All rights reserved
// -----------------------------------------------------------------------------
// Author : 辣子鸡味的橘子,331197689@qq.com
// File : key_debounce.v
// Create :
// Revise :
// Editor : sublime text4, tab size (4)
// Description:按键消抖模块
// -----------------------------------------------------------------------------
module key_debounce #(parameter N = 4,parameter TIME_20MS = 1000_000)(
input wire clk,
input wire rst_n,
input wire[N-1:0] key_in,//四个按键信号输入
output reg[N-1:0] key_out//四个按键信号消抖输出
);
reg[19:0] cnt;//20ms计数器
wire add_cnt;//计数开始
wire ent_cnt;//计数终止
wire nedge;//下降沿检测
reg[N-1:0] key_in_r0;//同步key_in输入信号
reg[N-1:0] key_in_r1;//延迟一个周期
reg[N-1:0] key_in_r2;//延迟两个周期
reg flag;//消抖开始标志信号
//计数器模块,当addent满足时开始计数,检测到下降沿重新计数,end_ent满足时停止计数,消抖完成
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt<=20'd0;
end
else if(add_cnt)begin
if(ent_cnt)begin
cnt<=20'd0;
end
else if(nedge)begin
cnt<=20'd0;
end
else begin
cnt<=cnt+1;
end
end
else begin
cnt<=cnt;
end
end
assign add_cnt = flag;//计数开始条件
assign end_cnt = (cnt == TIME_20MS - 1)&&add_cnt;//终止结束条件,当满足计时到20ms,且满足计时条件时成立
//信号延时模块
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
key_in_r0<={N{1'b1}};
key_in_r1<={N{1'b1}};
key_in_r2<={N{1'b1}};
end
else begin
key_in_r0<=key_in;
key_in_r1<=key_in_r0;
key_in_r2<=key_in_r1;
end
end
//检测下降沿,当任意一个按键出现下降沿都会被检测到
assign nedge = |(~key_in_r1&key_in_r2);
assign podge = |(key_in_r1&~key_in_r2);
//消抖开始模块
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
flag<=1'b0;
end
else if(nedge|podge)begin//当出现下降沿开始消抖
flag<=1'b1;
end
else if(end_cnt)begin//当end_cnt满足时停止消抖
flag<=1'b0;
end
else begin
flag<=flag;
end
end
//输出信号赋值模块,当消抖完毕标志按键按下,出现一个脉冲信号表示按键按下
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
key_out<=4'b0000;
end
else if(end_cnt)begin
key_out<=~key_in_r0;
end
else begin
key_out<=4'b0000;
end
end
endmodule
数据转化模块:
//==================================================================================================
// Filename : led_ws.v
// Created On : 2023-08-11 16:04:12
// Last Modified : 2023-08-14 15:45:43
// Revision :
// Author : 辣子鸡味的橘子
// Email : 331197689@qq.com
//
// Description : 这是led_ws模块,主要的作用是将传进来的数据用fifo进行存储,
// 将fifo中存储的数据,转换为器件的码型输出
//
//==================================================================================================
module led_ws(
input wire clk,
input wire rst_n,
input wire data_enable,
input wire[23:0] data,//输入的RGB数据
output wire ready,//一帧输出输出标志
output reg din//转换过后的码
);
//定义变量参数
parameter MAX_RST = 'd20000;
parameter MAX_BIT = 'd23;
parameter MAX_NUM = 'd63;
parameter MAX_T = 'd60;
//目前的数字
wire[4:0] num;
wire din_t0;//0码
wire din_t1;//1码
reg[7:0] cnt_cyc;
wire add_cnt_cyc;
wire end_cnt_cyc;
reg[4:0] cnt_bit;
wire add_cnt_bit;
wire end_cnt_bit;
reg[7:0] cnt_num;
wire add_cnt_num;
wire end_cnt_num;
reg[15:0] cnt_rst;
wire add_cnt_rst;
wire end_cnt_rst;
//****************************************************************
//--两段式状态机
//****************************************************************
//---------<状态定义及状态转移条件>-----------------------------------
parameter IDLE = 3'b001,
RESET = 3'b010,
DATA = 3'b100;
reg [2:0] state ;
wire idle2reset;
wire reset2data;
wire data2idle;
//---------<状态转移>-----------------------------------
always@(posedge clk or negedge rst_n)
if(!rst_n)
state <= IDLE;
else case(state)
IDLE : if(idle2reset)begin
state<=RESET;
end
RESET : if(reset2data)begin
state<=DATA;
end
DATA : if(data2idle)begin
state<=IDLE;
end
default:state<=state;
endcase
//---------<状态转移条件赋值>-----------------------------------
assign idle2reset = state == IDLE&&data_enable;
assign reset2data = state == RESET&&end_cnt_rst;
assign data2idle = state == DATA&&end_cnt_num;
//****************************************************************
//--fifoip核
//****************************************************************
wire fifo_wr;
wire fifo_rd;
wire fifo_empty;
wire fifo_full;
wire[5:0] fifo_usdw;
wire[23:0] fifo_q;
wire[23:0] fifo_data;
assign fifo_data = {data[15:8],data[23:16],data[7:0]};
assign fifo_wr = data_enable;//换成持续信号
assign fifo_rd = end_cnt_bit;
fifo fifo_inst (
.aclr ( ~rst_n ),
.clock ( clk ),
.data ( fifo_data ),
.rdreq ( fifo_rd ),
.wrreq ( fifo_wr ),
.empty ( fifo_empty ),
.full ( fifo_full ),
.q ( fifo_q ),
.usedw ( fifo_usdw )
);
//---------<周期计数1200ns>-----------------------------------
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_cyc<='d0;
end
else if(add_cnt_cyc)begin
if(end_cnt_cyc)begin
cnt_cyc <='d0;
end
else begin
cnt_cyc <= cnt_cyc + 1'b1;
end
end
else begin
cnt_cyc<=cnt_cyc;
end
end
assign add_cnt_cyc = state == DATA;
assign end_cnt_cyc = add_cnt_cyc && cnt_cyc == MAX_T;
//---------<24bit计数>-----------------------------------
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_bit<='d0;
end
else if(add_cnt_bit)begin
if(end_cnt_bit)begin
cnt_bit <='d0;
end
else begin
cnt_bit <= cnt_bit + 1'b1;
end
end
else begin
cnt_bit<=cnt_bit;
end
end
assign add_cnt_bit = end_cnt_cyc;
assign end_cnt_bit = add_cnt_bit && cnt_bit == MAX_BIT;
//---------<64个像素计数>-----------------------------------
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_num<='d0;
end
else if(add_cnt_num)begin
if(end_cnt_num)begin
cnt_num <='d0;
end
else begin
cnt_num <= cnt_num + 1'b1;
end
end
else begin
cnt_num<=cnt_num;
end
end
assign add_cnt_num = end_cnt_bit;
assign end_cnt_num = add_cnt_num && cnt_num == MAX_NUM;
//---------<复位时间计数>-----------------------------------
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_rst<='d0;
end
else if(add_cnt_rst)begin
if(end_cnt_rst)begin
cnt_rst <='d0;
end
else begin
cnt_rst <= cnt_rst + 1'b1;
end
end
else begin
cnt_rst<=cnt_rst;
end
end
assign add_cnt_rst = state == RESET;
assign end_cnt_rst = add_cnt_rst && cnt_rst == MAX_RST;
//目前计数的数字
assign num = 23 - cnt_bit;
// assign din_t0 = cnt_cyc<2?1'b1:1'b0;
// assign din_t1 = cnt_cyc<3?1'b1:1'b0;
assign din_t0 = cnt_cyc<15?1'b1:1'b0;
assign din_t1 = cnt_cyc<30?1'b1:1'b0;
//---------<单项码赋值>-----------------------------------
always @(*) begin
case(state)
IDLE: din = 1'b0;
RESET:din = 1'b0;
DATA:begin
if(fifo_q[num] == 1'b1)begin
din = din_t1;
end
else begin
din = din_t0;
end
end
default:din = 1'b1;
endcase
end
//准备条件
assign ready = state == IDLE;
endmodule
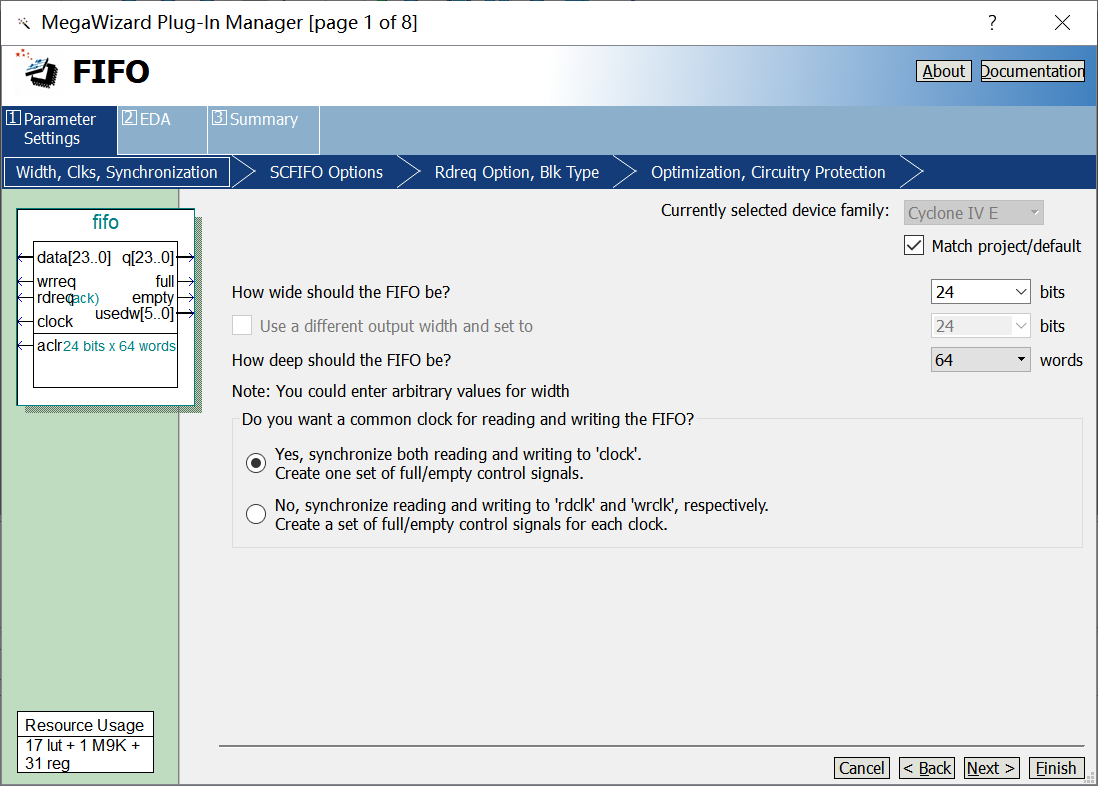
注意:其中设计到fifo的配置,下列我简单截取一下fifo中的配置
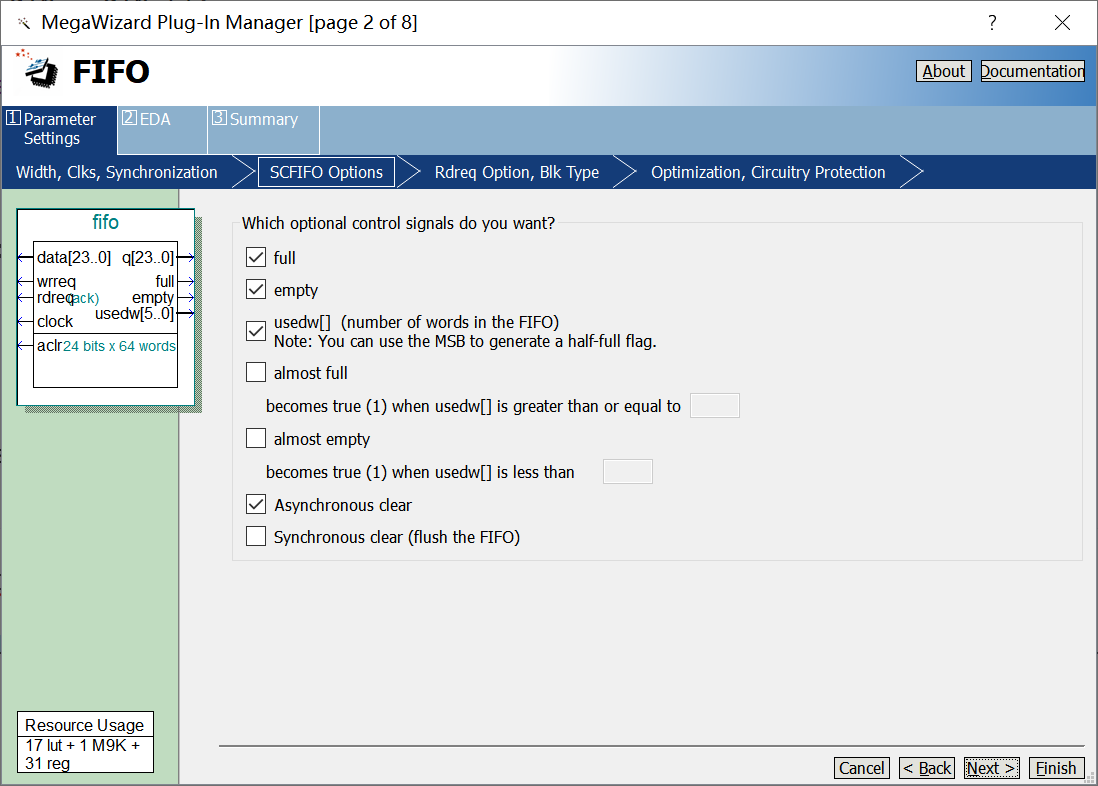
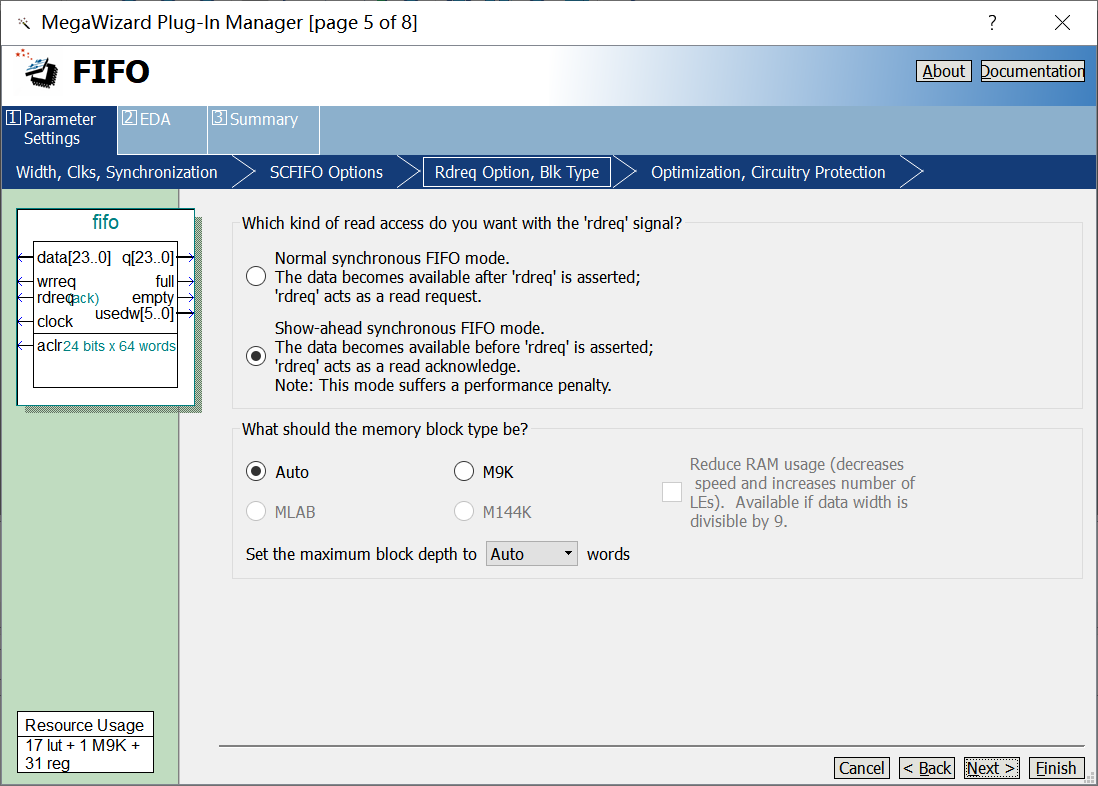
数据控制模块:
//==================================================================================================
// Filename : led_ws_control.v
// Created On : 2023-08-11 16:08:30
// Last Modified : 2023-08-14 17:22:26
// Revision :
// Author : 辣子鸡味的橘子
// Email : 331197689@qq.com
//
// Description :这是控制模块,通过按键按下
// 1、按下key[0],显示三种状态,流水灯、彩虹灯、字体动态显示
// 2、按下key[1],控制亮度,按下亮度是减小,注意有限制
// 3、按下key[2],控制变换速度,三档2s、1s、0.5s
//==================================================================================================
module led_ws_control(
input wire clk,
input wire rst_n,
input wire ready,//准备信号,由led_ws发出,当fifo值为空时发出,告诉控制端准备发送数据
input wire[2:0] key,
output wire enable,//使能信号,64个周期,写入63个数,给fifo进行寄存
output wire[23:0] data_out//输出值
);
parameter TIME_2S = 'd99_999_999;
parameter TIME_1S = 'd49_999_999;
parameter TIME_500MS = 'd24_999_999;
wire[5:0] color_num;
wire[4:0] offect_num;
reg[2:0] flag_color;//控制彩灯闪烁
//亮度信号
reg[23:0] data_out_r1;
wire[23:0] data_out_r2;
reg[27:0] cnt_max;//灯光时间值
reg[2:0] flag_time;//灯光时间控制状态
//---------<状态定义及状态转移条件>-----------------------------------
parameter IDLE = 3'b001 ,
DATA = 3'b010,
DELAY = 3'b100;
reg [2:0] state ;
wire idle2data;
wire data2delay;
wire delay2idle;
//****************************************************************
//--两段式状态机
//****************************************************************
reg[7:0] cnt;
wire add_cnt;
wire end_cnt;
//ram rom读写使能信号
wire ram_rd;
wire rom_rd;
//打拍延时信号
reg enable1;
reg enbale2;
reg[2:0] flag;//控制信号
reg[23:0] model1;//模式一
reg[23:0] model2;//模式二
wire[23:0] q_out;//ram的输出
wire[23:0] q_out1;//rom的输出
//---------<灯光亮度调节>-----------------------------------
//每次按下减小1/2,超过会复位
reg[3:0] cnt_light;
wire add_cnt_light;
wire end_cnt_light;
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_light<='d0;
end
else if(add_cnt_light)begin
if(end_cnt_light)begin
cnt_light <='d0;
end
else begin
cnt_light <= cnt_light + 1;
end
end
else begin
cnt_light<=cnt_light;
end
end
assign add_cnt_light = key[1];
assign end_cnt_light = add_cnt_light && cnt_light == 'd5;
//---------<灯光速度控制>-----------------------------------
always @(posedge clk or negedge rst_n) begin
if(~rst_n)begin
flag_time<=3'b100;
end
else if(key[2])begin
flag_time<={flag_time[0],flag_time[2:1]};
end
else begin
flag_time<=flag_time;
end
end
//---------<灯光时间数据寄存>-----------------------------------
always @(*) begin
case(flag_time)
3'b001:cnt_max = TIME_500MS;
3'b010:cnt_max = TIME_1S;
3'b100:cnt_max = TIME_2S;
default:cnt_max = TIME_2S;
endcase
end
//灯光时间time计数器
reg[27:0] cnt_time;
wire add_cnt_time;
wire end_cnt_time;
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_time<='d0;
end
else if(add_cnt_time)begin
if(end_cnt_time)begin
cnt_time <='d0;
end
else begin
cnt_time <= cnt_time + 1'b1;
end
end
else begin
cnt_time<=cnt_time;
end
end
assign add_cnt_time = state == DELAY;
assign end_cnt_time = add_cnt_time && cnt_time == cnt_max;
//****************************************************************
//--x坐标计数器
//****************************************************************
reg[2:0] cnt_x;
wire add_cnt_x;
wire end_cnt_x;
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_x<='d0;
end
else if(add_cnt_x)begin
if(end_cnt_x)begin
cnt_x <='d0;
end
else begin
cnt_x <= cnt_x + 1'b1;
end
end
else begin
cnt_x<=cnt_x;
end
end
assign add_cnt_x = rom_rd;
assign end_cnt_x = add_cnt_x && cnt_x == 'd7;
//****************************************************************
//--y坐标计数器
//****************************************************************
reg[2:0] cnt_y;
wire add_cnt_y;
wire end_cnt_y;
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_y<='d0;
end
else if(add_cnt_y)begin
if(end_cnt_y)begin
cnt_y <='d0;
end
else begin
cnt_y <= cnt_y + 1'b1;
end
end
else begin
cnt_y<=cnt_y;
end
end
assign add_cnt_y = end_cnt_x;
assign end_cnt_y = add_cnt_y && cnt_y == 'd7;
//****************************************************************
//--偏移量计数器
//****************************************************************
reg[5:0] cnt_offect;
wire add_cnt_offect;
wire end_cnt_offect;
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_offect<='d0;
end
else if(add_cnt_offect)begin
if(end_cnt_offect)begin
cnt_offect <='d0;
end
else begin
cnt_offect <= cnt_offect + 1'b1;
end
end
else begin
cnt_offect<=cnt_offect;
end
end
assign add_cnt_offect = end_cnt_time;
assign end_cnt_offect = add_cnt_offect && cnt_offect == 'd31;
//更换灯光状态
//****************************************************************
//--闪烁灯效果
//****************************************************************
reg[2:0] cnt_state1;
wire add_cnt_state1;
wire end_cnt_state1;
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt_state1<='d0;
end
else if(add_cnt_state1)begin
if(end_cnt_state1)begin
cnt_state1 <='d0;
end
else begin
cnt_state1 <= cnt_state1 + 1'b1;
end
end
else begin
cnt_state1<=cnt_state1;
end
end
assign add_cnt_state1 = end_cnt_time;
assign end_cnt_state1 = add_cnt_state1 && cnt_state1 == 'd8;
always @(*) begin
case(cnt_state1)
'd0:model1 <= 24'b00000000_11111110_00000000; // 红
'd1:model1 <= 24'b11001101_11111110_00000000; // 橙
'd2:model1 <= 24'b11111110_11111110_00000000; // 黄
'd3:model1 <= 24'b11111110_00000000_00000000; // 绿
'd4:model1 <= 24'b11111110_00000000_11111110; // 青
'd5:model1 <= 24'b00000000_00000000_11111110; // 蓝
'd6:model1 <= 24'b00000000_11001100_11001100; // 紫
'd7:model1 <= 24'b11111110_11111110_11111110; // 白
'd8:model1 <= 24'b11111111_11111111_11111111;
default:model1 = 24'hffffff;
endcase
end
//更换灯光状态
//****************************************************************
//--流水灯效果
//****************************************************************
assign color_num = (cnt_y+cnt_offect)%8;
always @(*) begin
case(color_num)
'd7:model2 = 24'b00000000_11111110_00000000; // 红
'd6:model2 = 24'b11001101_11111110_00000000; // 橙
'd5:model2 = 24'b11111110_11111110_00000000; // 黄
'd4:model2 = 24'b11111110_00000000_00000000; // 绿
'd3:model2 = 24'b11111110_00000000_11111110; // 青
'd2:model2 = 24'b00000000_00000000_11111110; // 蓝
'd1:model2 = 24'b00000000_11001100_11001100; // 紫
'd0:model2 = 24'b11111110_11111110_11111110; //白
default:model2 = 24'hffffff;
endcase
end
//---------<灯光控制信号>-----------------------------------
always @(posedge clk or negedge rst_n) begin
if(~rst_n)begin
flag<=3'b001;
end
else if(key[0])begin
flag<={flag[1:0],flag[2]};
end
else begin
flag<=flag;
end
end
//计数器,用于计算发送数据的个数
always @(posedge clk or negedge rst_n) begin
if(~rst_n) begin
cnt<='d0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt<=cnt;
end
end
assign add_cnt = state == DATA;
assign end_cnt = add_cnt && cnt == 'd63;
//****************************************************************
//--延时打拍使能信号,因为ram读取的信号有两拍的延时
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(~rst_n)begin
enable1<=1'b0;
enbale2<=1'b0;
end
else begin
enable1<=ram_rd;
enbale2<=enable1;
end
end
//---------<状态转移>-----------------------------------
always@(posedge clk or negedge rst_n)
if(!rst_n)
state <= IDLE;
else case(state)
IDLE : if(idle2data)state<=DATA;
DATA : if(data2delay)state<=DELAY;
DELAY : if(delay2idle)state<=IDLE;
default : state <= IDLE;
endcase
//---------<状态转移条件赋值>-----------------------------------
assign idle2data = ready&&state==IDLE;
assign data2delay = end_cnt&&state==DATA;
assign delay2idle = end_cnt_time&&state==DELAY;
//****************************************************************
//--灯光状态3
//****************************************************************
assign offect_num = cnt_offect+cnt_x;
rom rom_inst (
.aclr ( ~rst_n ),
.address ( cnt_y*32+offect_num ),
.clock ( clk ),
.rden ( rom_rd ),
.q ( q_out1 )
);
//读写使能定义条件
assign ram_rd = state == DATA;
assign rom_rd = state == DATA;
assign enable = (flag == 3'b100)?enbale2:rom_rd;
//data_out_r1输出值定义
always @(*) begin
case(flag)
3'b001:data_out_r1 = model1;
3'b010:data_out_r1 = model2;
3'b100:begin
if(enbale2)begin
//data_out_r1 = q_out;//RAM显示
data_out_r1 = q_out1;//ROM显示
end
else begin
data_out_r1 = 24'h000000;
end
end
default:data_out_r1 = 24'h000000;
endcase
end
//---------<亮度值控制>-----------------------------------
assign data_out_r2[7:0] = cnt_light == 0?data_out_r1[7:0]:(data_out_r1[7:0]>>cnt_light);
assign data_out_r2[15:8] = cnt_light == 0?data_out_r1[15:8]:(data_out_r1[15:8]>>cnt_light);
assign data_out_r2[23:16] = cnt_light == 0?data_out_r1[23:16]:(data_out_r1[23:16]>>cnt_light);
assign data_out = data_out_r2;
endmodule
这里涉及到了rom的配置,我这里简单演示
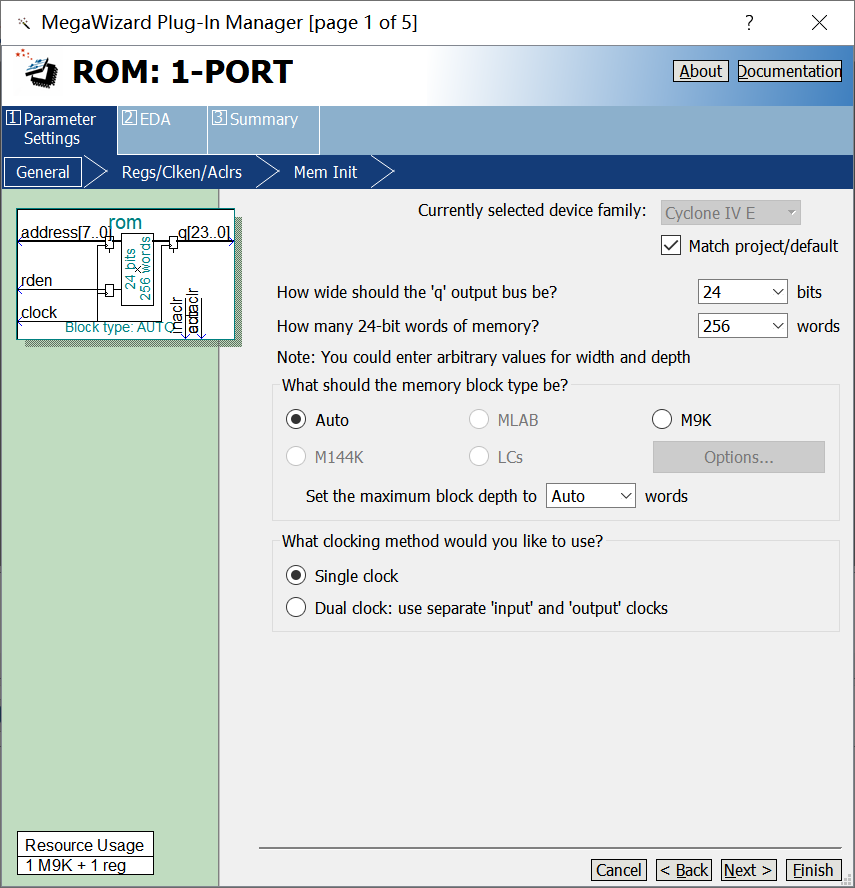
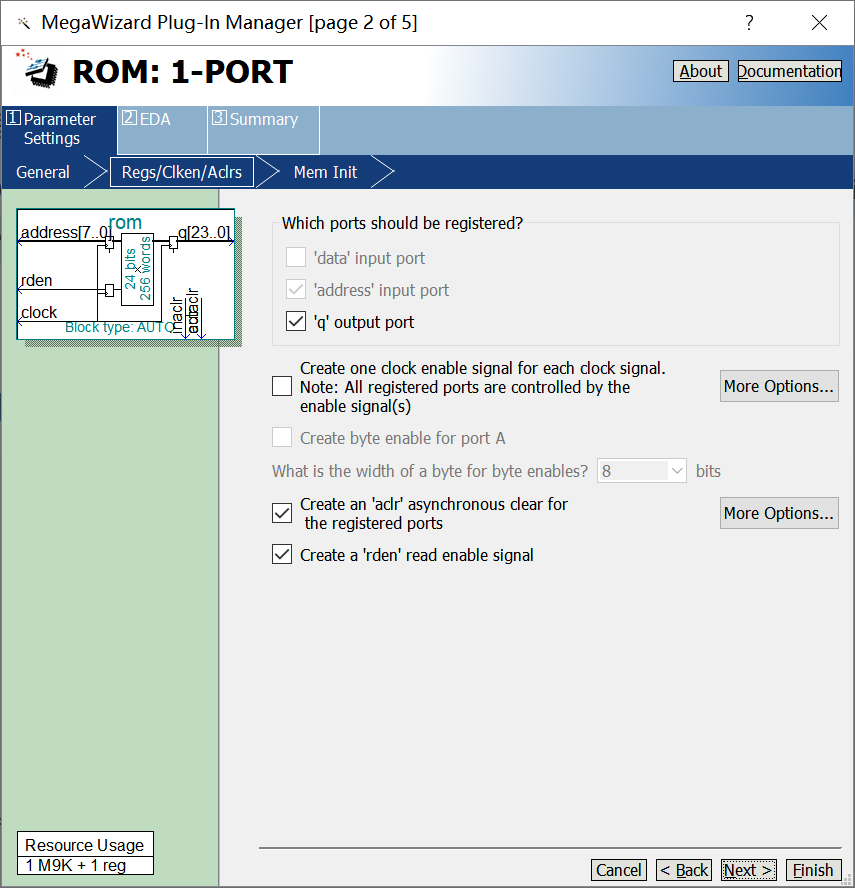
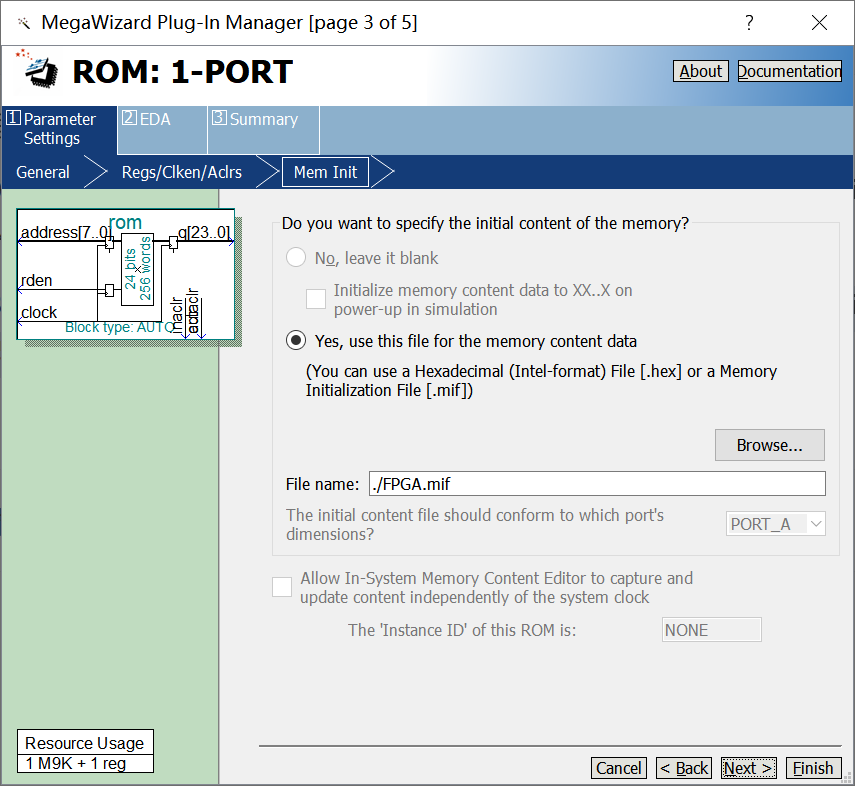
mif文件内容:
-- Copyright (C) 2015-Endless, CrazyBird Corporation
-- Thank you for use CrazyBird's design tools
DEPTH = 256;
WIDTH = 24;
ADDRESS_RADIX = UNS;
DATA_RADIX = HEX;
CONTENT BEGIN
0 : ed1c24;
1 : ed1c24;
2 : ed1c24;
3 : ed1c24;
4 : ed1c24;
5 : 000000;
6 : 000000;
7 : 000000;
8 : ed1c24;
9 : ed1c24;
10 : ed1c24;
11 : ed1c24;
12 : ed1c24;
13 : 000000;
14 : 000000;
15 : 000000;
16 : ed1c24;
17 : ed1c24;
18 : ed1c24;
19 : ed1c24;
20 : 000000;
21 : 000000;
22 : 000000;
23 : 000000;
24 : 000000;
25 : 000000;
26 : ed1c24;
27 : ed1c24;
28 : ed1c24;
29 : 000000;
30 : 000000;
31 : 000000;
32 : ed1c24;
33 : 000000;
34 : 000000;
35 : 000000;
36 : 000000;
37 : 000000;
38 : 000000;
39 : 000000;
40 : ed1c24;
41 : 000000;
42 : 000000;
43 : 000000;
44 : ed1c24;
45 : 000000;
46 : 000000;
47 : 000000;
48 : ed1c24;
49 : 000000;
50 : 000000;
51 : 000000;
52 : 000000;
53 : 000000;
54 : 000000;
55 : 000000;
56 : 000000;
57 : 000000;
58 : ed1c24;
59 : 000000;
60 : ed1c24;
61 : ed1c24;
62 : 000000;
63 : 000000;
64 : ed1c24;
65 : 000000;
66 : 000000;
67 : 000000;
68 : 000000;
69 : 000000;
70 : 000000;
71 : 000000;
72 : ed1c24;
73 : 000000;
74 : 000000;
75 : 000000;
76 : ed1c24;
77 : 000000;
78 : 000000;
79 : 000000;
80 : ed1c24;
81 : 000000;
82 : 000000;
83 : 000000;
84 : 000000;
85 : 000000;
86 : 000000;
87 : 000000;
88 : 000000;
89 : 000000;
90 : ed1c24;
91 : 000000;
92 : 000000;
93 : ed1c24;
94 : 000000;
95 : 000000;
96 : ed1c24;
97 : ed1c24;
98 : ed1c24;
99 : ed1c24;
100 : ed1c24;
101 : 000000;
102 : 000000;
103 : 000000;
104 : ed1c24;
105 : ed1c24;
106 : ed1c24;
107 : ed1c24;
108 : ed1c24;
109 : 000000;
110 : 000000;
111 : 000000;
112 : ed1c24;
113 : 000000;
114 : 000000;
115 : ed1c24;
116 : ed1c24;
117 : ed1c24;
118 : ed1c24;
119 : 000000;
120 : 000000;
121 : ed1c24;
122 : ed1c24;
123 : 000000;
124 : 000000;
125 : ed1c24;
126 : ed1c24;
127 : 000000;
128 : ed1c24;
129 : 000000;
130 : 000000;
131 : 000000;
132 : 000000;
133 : 000000;
134 : 000000;
135 : 000000;
136 : ed1c24;
137 : 000000;
138 : 000000;
139 : 000000;
140 : 000000;
141 : 000000;
142 : 000000;
143 : 000000;
144 : ed1c24;
145 : 000000;
146 : 000000;
147 : ed1c24;
148 : 000000;
149 : 000000;
150 : ed1c24;
151 : 000000;
152 : 000000;
153 : ed1c24;
154 : ed1c24;
155 : ed1c24;
156 : ed1c24;
157 : ed1c24;
158 : ed1c24;
159 : 000000;
160 : ed1c24;
161 : 000000;
162 : 000000;
163 : 000000;
164 : 000000;
165 : 000000;
166 : 000000;
167 : 000000;
168 : ed1c24;
169 : 000000;
170 : 000000;
171 : 000000;
172 : 000000;
173 : 000000;
174 : 000000;
175 : 000000;
176 : ed1c24;
177 : 000000;
178 : 000000;
179 : ed1c24;
180 : 000000;
181 : 000000;
182 : ed1c24;
183 : 000000;
184 : 000000;
185 : ed1c24;
186 : 000000;
187 : 000000;
188 : 000000;
189 : 000000;
190 : ed1c24;
191 : ed1c24;
192 : ed1c24;
193 : 000000;
194 : 000000;
195 : 000000;
196 : 000000;
197 : 000000;
198 : 000000;
199 : 000000;
200 : ed1c24;
201 : 000000;
202 : 000000;
203 : 000000;
204 : 000000;
205 : 000000;
206 : 000000;
207 : 000000;
208 : ed1c24;
209 : 000000;
210 : 000000;
211 : 000000;
212 : 000000;
213 : ed1c24;
214 : ed1c24;
215 : 000000;
216 : ed1c24;
217 : ed1c24;
218 : 000000;
219 : 000000;
220 : 000000;
221 : 000000;
222 : 000000;
223 : ed1c24;
224 : ed1c24;
225 : 000000;
226 : 000000;
227 : 000000;
228 : 000000;
229 : 000000;
230 : 000000;
231 : 000000;
232 : ed1c24;
233 : 000000;
234 : 000000;
235 : 000000;
236 : 000000;
237 : 000000;
238 : 000000;
239 : 000000;
240 : ed1c24;
241 : ed1c24;
242 : ed1c24;
243 : ed1c24;
244 : ed1c24;
245 : ed1c24;
246 : 000000;
247 : 000000;
248 : ed1c24;
249 : 000000;
250 : 000000;
251 : 000000;
252 : 000000;
253 : 000000;
254 : 000000;
255 : ed1c24;
END;
**注意:**mif文件要放在工程目录下,不然读取不到数据
3、仿真代码
这个仿真代码很简单,注意各个模块中的参数值就行
`timescale 1ns/1ns
module top_tb();
reg clk;
reg rst_n;
reg[2:0] key;
wire din;
parameter SYS_CLK = 20;
always #(SYS_CLK/2) clk = ~clk;
initial begin
clk=1'b0;
rst_n=1'b0;
#(2*SYS_CLK);
rst_n=1'b1;
end
defparam inst_top.inst_led_ws_control.TIME_500MS = 1000;
defparam inst_top.inst_led_ws_control.TIME_1S = 2000;
defparam inst_top.inst_led_ws_control.TIME_2S = 4000;
initial begin
//彩虹灯模式
key = 3'b111;
#(SYS_CLK*50);
key = 3'b110;
#(SYS_CLK*50);
key = 3'b111;
#(50*SYS_CLK);
//字体动态显示模式
// key = 3'b111;
// #(SYS_CLK*50);
// key = 3'b110;
// #(SYS_CLK*50);
// key = 3'b111;
// #(50*SYS_CLK);
//流水灯模式
// key = 3'b111;
// #(SYS_CLK*50);
// key = 3'b110;
// #(SYS_CLK*50);
// key = 3'b111;
// #(50*SYS_CLK);
#2000000;
$stop;
end
top inst_top (.clk(clk), .rst_n(rst_n), .key(key), .din(din));
endmodule
4、结果展示
1、闪烁灯:
2、彩虹灯
3、字体动态显示







![同样的字符串,有一些事长度为3,有一些长度为2,导致Convert.ToByte(macStringArray[i], 16);出错](https://img-blog.csdnimg.cn/847b174a1fbc4babbbf6809ffdc21146.png)