工作空间介绍
workspace 是存放整个项目的大目录。
其中包含:
src:源码。
build:编译文件。
install:安装空间,存放编译成功后的目标文件。
log:日志。
我们新建一个工作空间目录,其中包含 src 目录,git clone https://gitee.com/guyuehome/ros2_21_tutorials.git 到 src 目录中。
在工作目录中安装依赖(通过 rosdepc),编译工作空间,设置环境变量。
代码功能包可以通过 ros 的 pkg create 功能创建。在 src 文件夹下执行:
$ ros2 pkg create --build-type ament_cmake learning_pkg_c
$ ros2 pkg create --build-type ament_python learning_pkg_python
C 功能包中包含 package.xml 和 CMakeLists.txt。package.xml 包含包基本信息和所需依赖,CMakeLists.txt 指明如何编译。
Python 功能包中包含 package.xml 和 Setup.cfg/Setup.py,Setup.py 中包含一些程序配置,入口节点等。
https://docs.ros.org/en/humble/Tutorials/Workspace/Creating-A-Workspace.html
https://docs.ros.org/en/humble/Tutorials/Creating-Your-First-ROS2-Package.html
节点
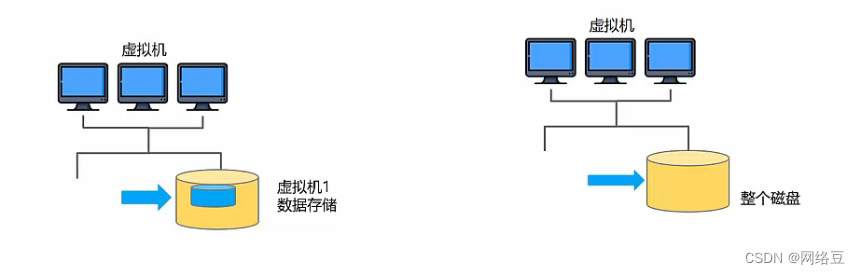
节点是机器人的基本单元,独立执行具体任务。他们可以是不同编程语言,运行在不同位置(云端,本地……)
Helloworld 案例
目标:隔0.5s输出一次 helloworld.
在 learning_node/learning_node/node_helloworld .py 案例中可以看到:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2节点示例-发布“Hello World”日志信息, 使用面向过程的实现方式
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = Node("node_helloworld") # 创建ROS2节点对象并进行初始化
while rclpy.ok(): # ROS2系统是否正常运行
node.get_logger().info("Hello World") # ROS2日志输出
time.sleep(0.5) # 休眠控制循环时间
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
rclpy:系统。
node:节点。
前面的部分都是固定的, import 包,定义 main 函数,初始化接口。
然后在 learning_node/setup.py 中:
from setuptools import setup
package_name = 'learning_node'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='Hu Chunxu',
maintainer_email='huchunxu@guyuehome.com',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'node_helloworld = learning_node.node_helloworld:main',
'node_helloworld_class = learning_node.node_helloworld_class:main',
'node_object = learning_node.node_object:main',
'node_object_webcam = learning_node.node_object_webcam:main',
],
},
)
entry_points 入口点中包含了对应要编译的文件,才可以被 ros run 中找到 learning_node 功能包以及其中的程序,程序中的入口函数。
另一种编程方式(更推荐)是面向节点对象的编程方式。在 node_helloworld_class.py 中:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2节点示例-发布“Hello World”日志信息, 使用面向对象的实现方式
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
"""
创建一个HelloWorld节点, 初始化时输出“hello world”日志
"""
class HelloWorldNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
while rclpy.ok(): # ROS2系统是否正常运行
self.get_logger().info("Hello World") # ROS2日志输出
time.sleep(0.5) # 休眠控制循环时间
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = HelloWorldNode("node_helloworld_class") # 创建ROS2节点对象并进行初始化
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
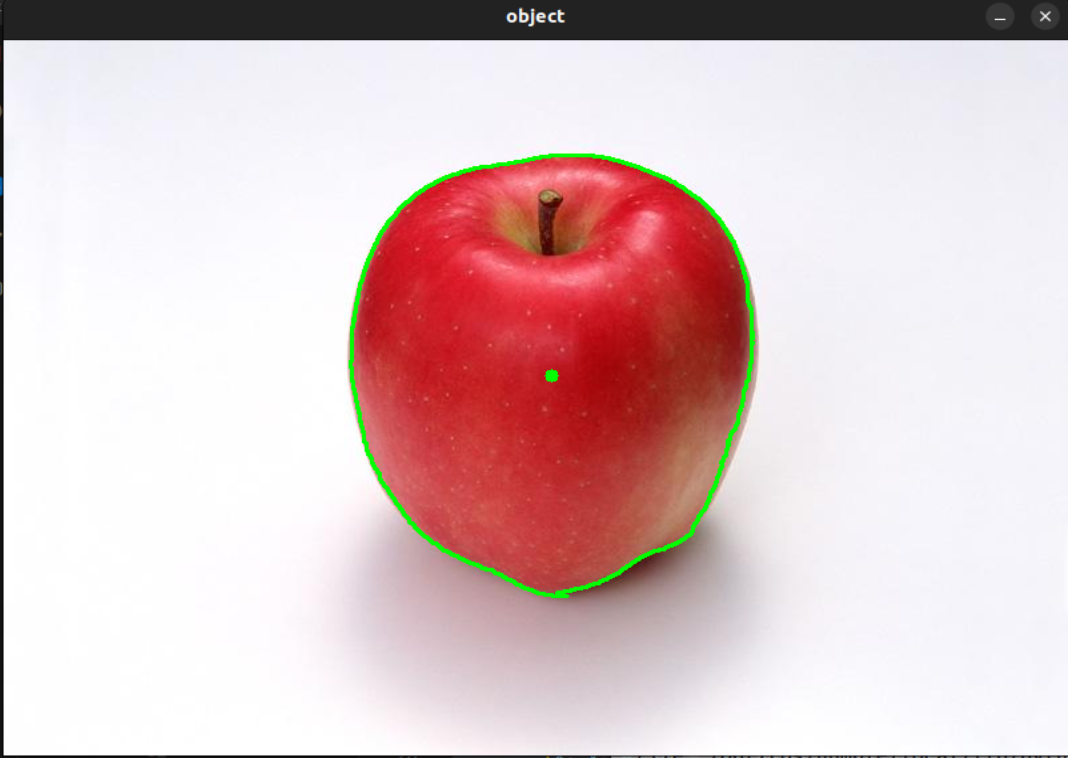
物品识别
识别图片中的红苹果。
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2节点示例-通过颜色识别检测图片中出现的苹果
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import cv2 # OpenCV图像处理库
import numpy as np # Python数值计算库
lower_red = np.array([0, 90, 128]) # 红色的HSV阈值下限
upper_red = np.array([180, 255, 255]) # 红色的HSV阈值上限
def object_detect(image):
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # 图像从BGR颜色模型转换为HSV模型
mask_red = cv2.inRange(hsv_img, lower_red, upper_red) # 图像二值化
contours, hierarchy = cv2.findContours(mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) # 图像中轮廓检测
for cnt in contours: # 去除一些轮廓面积太小的噪声
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt) # 得到苹果所在轮廓的左上角xy像素坐标及轮廓范围的宽和高
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2) # 将苹果的轮廓勾勒出来
cv2.circle(image, (int(x+w/2), int(y+h/2)), 5, (0, 255, 0), -1) # 将苹果的图像中心点画出来
cv2.imshow("object", image) # 使用OpenCV显示处理后的图像效果
cv2.waitKey(0)
cv2.destroyAllWindows()
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = Node("node_object") # 创建ROS2节点对象并进行初始化
node.get_logger().info("ROS2节点示例:检测图片中的苹果")
image = cv2.imread('/home/jingqing3948/Develop/ros/dev_ws/src/ros2_21_tutorials/learning_node/learning_node/apple.jpg') # 读取图像
object_detect(image) # 苹果检测
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
也可以把 image 改成调用摄像头,来动态识别。
cap = cv2.VideoCapture(0)
while rclpy.ok():
ret, image = cap.read() # 读取一帧图像
if ret == True:
object_detect(image) # 苹果检测
当然,节点并不是孤立的,比如用摇杆控制游戏界面。