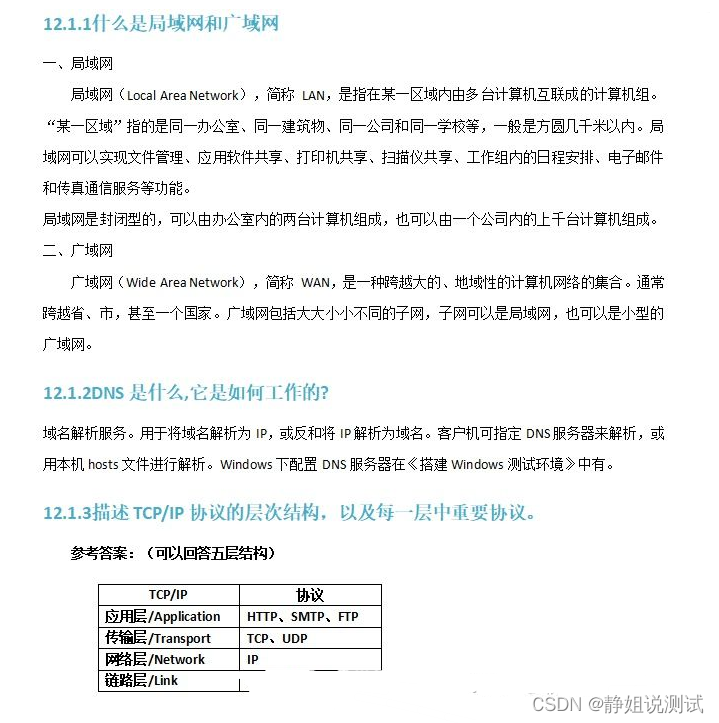
大家好,我是小政。最近在学习卡尔曼滤波,本篇文章记录一下我学习的卡尔曼滤波器中的递归算法,通过举例子让大家更加清晰理解递归到底是什么?希望与同是卡尔曼滤波研究方向的同学进行一些交流。
递归算法
- 1.为什么要用卡尔曼滤波器?
- 2.公式推导
- 3.举例说明(基于Matlab/Excel平台)
- (1)Excel实验
- (2)Matlab实验
1.为什么要用卡尔曼滤波器?
现实社会中存在诸多的不确定性:
- 不存在完美的数学模型
- 系统的扰动不可控,也很难建模
- 测量传感器存在误差
2.公式推导
设测量结果为Zk,k表示第k次假设硬币真实直径50mm,我们测得的数据可能是Z1=50.1mm,Z2=50.3mm,Z3=49.8mm
通常情况下,我们会把估计的真实数据进行一个取平均值(平均值法又叫均值滤波)。


经过一系列推导我们可以得到:

即:当前估计值=上一次估计值+卡尔曼增益×(当前测量值-上一次估计值)

★ 递归思想:新的估计值与上一次的估计值有关

个人理解:测量误差是传感器的示值与传感器真正接受到的物理量之间的差值。
进而得到,卡尔曼增益:

讨论:在k时刻

计算递归问题步骤如下:

3.举例说明(基于Matlab/Excel平台)

(1)Excel实验
假设有20组数据,我们在Excel上进行实现得到:

(2)Matlab实验
%rand函数: 随机产生0到1内的一个数,rand(50,1)产生50个0到1内的数字
Z = 3*(rand(50,1)*2-1)+50;%产生47到53内的随机数字
x_hat= zeros(50,1);
K = zeros(50,1);
e = zeros(50,1);
x_hat(1) = 40;
e(1) = 5;
K(1) = 0;
%%
for k = 2:50
K(k) = e(k-1)/(e(k-1)+3);
x_hat(k) = x_hat(k-1)+K(k)*(Z(k)-x_hat(k-1));
e(k) = (1-K(k))*e(k-1);
end
figure('NumberTitle', 'off', 'Name', 'Recursive Algorithm');
plot(Z);
hold on
plot(x_hat);
legend('测量值','估计值');
运行结果如下图:








![[附源码]Nodejs计算机毕业设计基于Java网络游戏后台管理系统Express(程序+LW)](https://img-blog.csdnimg.cn/3783fec833164acab3362eceabd80242.png)