目 录
第1章 绪论 1
第2章 清洁机器人路径规划方法的分类及现状 5
2.1 基于事例的学习规划方法 5
2.2 基于环境模型的规划方法 6
2.3 基于行为的结构 7
第3章 清洁机器人的设计任务及方案分析 10
3.1 清洁机器人竞赛介绍 10
3.2 设计任务分解 11
3.3 清洁机器人任务分析及基于行为设计 12
3.3.1 巡视通道,沿墙行走行为 13
3.3.2 判断通道,触发旋转行为 19
3.3 机械平台 21
3.4.1 清洁机器人移动机构方案选择 21
3.4.2 车轮的安装与选择 26
3.4.3 车轮的选择 27
3.5 多传感器的配合使用 28
3.5.1 传感器在机器人学科应用 28
3.5.2 清洁机器人红外传感器 30
3.5.3清洁机器人传感器设计方案 34
第4章 清洁机器人四相步进电机及驱动电路设计 38
4.1 步进电机控制概况 38
4.2 反应式步进电动机的结构及工作原理 39
4.3 步进电机功率的确定 43
4.4 驱动电源 45
4.4.1 步进电动机的控制 47
4.4.2 清洁机器人所使用的步进电机驱动电路 49
4.5 单片机控制 53
4.6 单片机控制程序流程图 64
第5章 基于清洁机器人控制系统的一种实用自主吸尘机器人机械设计 69
5.1差动式车体运动学分析 70
5.2 驱动轮机构组成 74
5.3 随动轮机构组成 79
结 论 81
致 谢 83
参考文献 85
附录一: C语言单片机控制程序 88
附录二: PCB印刷图 88
附录三: 外文翻译 88
附录四: 实习报告 88













一种清洁机器人设计及仿真
news2026/5/21 13:06:51
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/8386.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

Unity和UE4两大游戏引擎,你该如何选择?
目录
游戏引擎
2 ——> 难易区别
编程语言
3 ——> 游戏产品
UE4制作的游戏产品
Unity制作的游戏产品
产品类型
5 ——> 资源商店
6 ——> 人才需求
平均薪资
总结 游戏引擎 Unity和UE4都是游戏引擎,所谓游戏引擎就是集成了复杂功能的游戏…

短视频/直播+教育成为教育新常态
互联网时代,网络视听应用已经成为吸引新网民的主要力量,2020年,在新增的3625万网民中,有23.9%是为了使用网络视听应用而来。网络视听应用中,最受欢迎的当属短视频,已然成为新的国民级应用行业。
如今&…
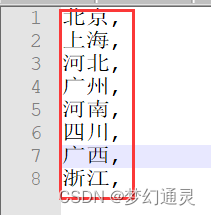
Excel之数据透视NotePad之列编辑
在日常工作中,经常有数据处理的需求,要统计个数,这里就可以使用到工具的一些功能,如 Excel、Notepad,记录下来,分享功能。
一、Excel 软件
Excel 功能过于强大,下面只是简单分享下日常使用到的…

【附源码】计算机毕业设计JAVA大数据文章发布系统
【附源码】计算机毕业设计JAVA大数据文章发布系统
目运行
环境项配置:
Jdk1.8 Tomcat8.5 Mysql HBuilderX(Webstorm也行) Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。
项目技术:
JAVA …
C++ Reference: Standard C++ Library reference: Containers: deque: deque: begin
C官网参考链接:https://cplusplus.com/reference/deque/deque/begin/
公有成员函数 <deque> std::deque::begin C98 iterator begin(); const_iterator begin() const; C11 iterator begin() noexcept; const_iterator begin() const noexcept;返回指向开始…
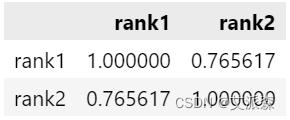
基于五等均分法和Bob Stone法衡量RFM顾客价值
最近学习了衡量RFM模型的两种顾客价值的方法,即五等均分法和Bob Stone法。仅以此博客记录我的学习过程,后序学习到了其他方法再来补充。关于RFM实战案例可参考我的其他文章大数据分析案例-基于RFM模型对电商客户价值分析
大数据分析案例-用RFM模型对客户…
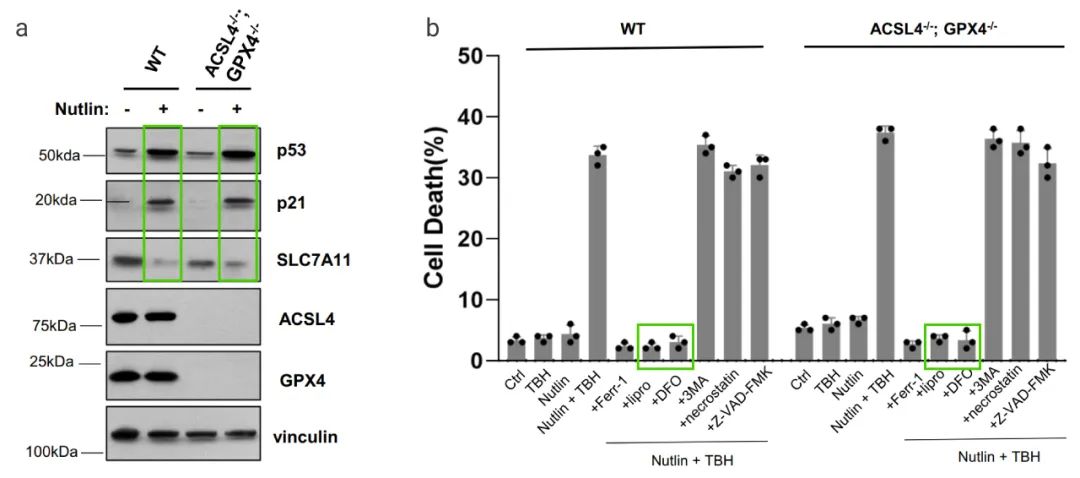
p53 与铁死亡有关?Nature 解锁新机制
众所周知,p53 是一种肿瘤抑制基因,被广泛称为“基因组的守护者”。自 1979 年被发现至今,p53 基因一直是分子生物学和肿瘤学的研究热门。据 Elie Dolgin 在 Nature 上发表的 “The most popular genes in the human genome” 统计,…
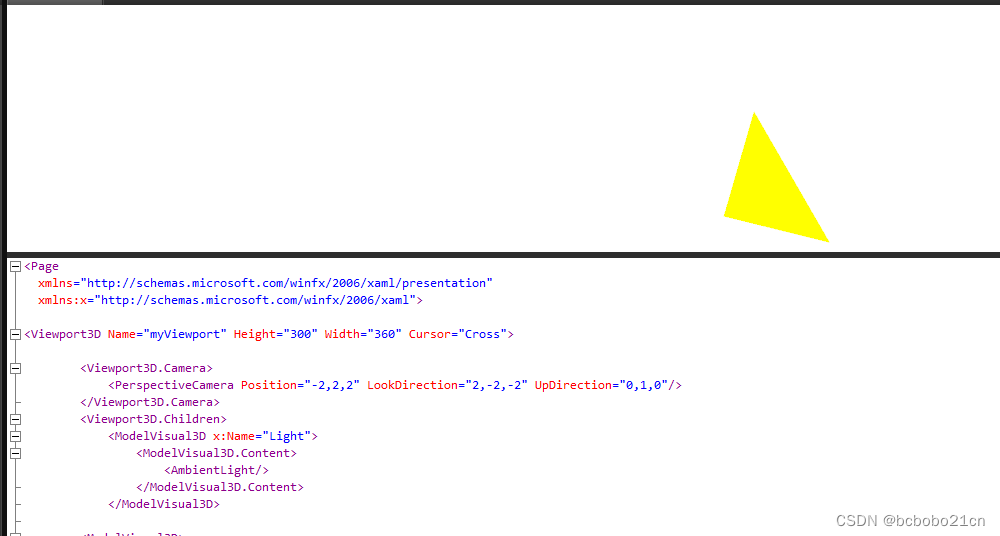
wpf Viewport3D 学习
呈现 Viewport3D 元素的 2-D 布局范围内包含的 3-D 内容。就是3D画布,
继承 Object DispatcherObject DependencyObject Visual UIElement FrameworkElement Viewport3D 从FrameworkElement继承,FrameworkElement继承自UIElement;
该 V…
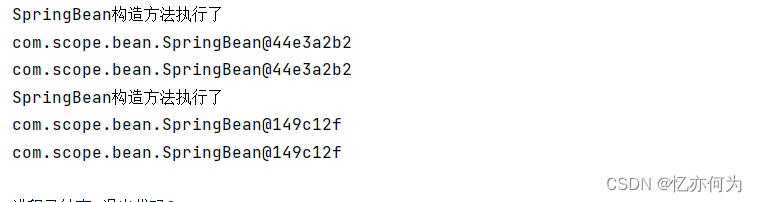
(五)Spring之Bean的作用域
文章目录环境单例的(singleton)多例的(prototype)其它scope自定义scope上一篇:(四)Spring对IoC的实现
环境
spring6里程碑版本的仓库 依赖:spring context依赖、junit依赖、log4j2…

【单片机基础】单片机中断和定时
中断什么是中断?中断IE寄存器中断查询次序例程定时器/计数器实现定时的方法?定时计数的概念什么是单片机定时器/计数器?定时器/计数器内部结构定时器的相关寄存器51单片机定时器初值计算方法详解例程中断
什么是中断?
中断是为使…

VINS学习(二)IMU预积分原理与实现
VINS学习(二)IMU预积分原理与实现一、连续时间下的IMU积分二、连续时间下的IMU预积分三、离散时间下的IMU预积分1. 欧拉法2. 中值法四、连续时间下的IMU状态误差传递五、离散时间下的IMU状态误差传递六、预积分量关于零偏的雅克比七、VINS代码实践1.预积…

【文末福利】半导体封装率先国产化,400+封装厂商最新名单汇总
根据我国国民经济“九五”计划至“十四五”规划,可窥见多方政策都在积极支持我国集成电路的发展,近几年更是强调突破集成电路关键技术,集中力量发展集成电路。其中封测技术作为集成电路制造的后道工艺,在整个集成电路产业链中扮演…
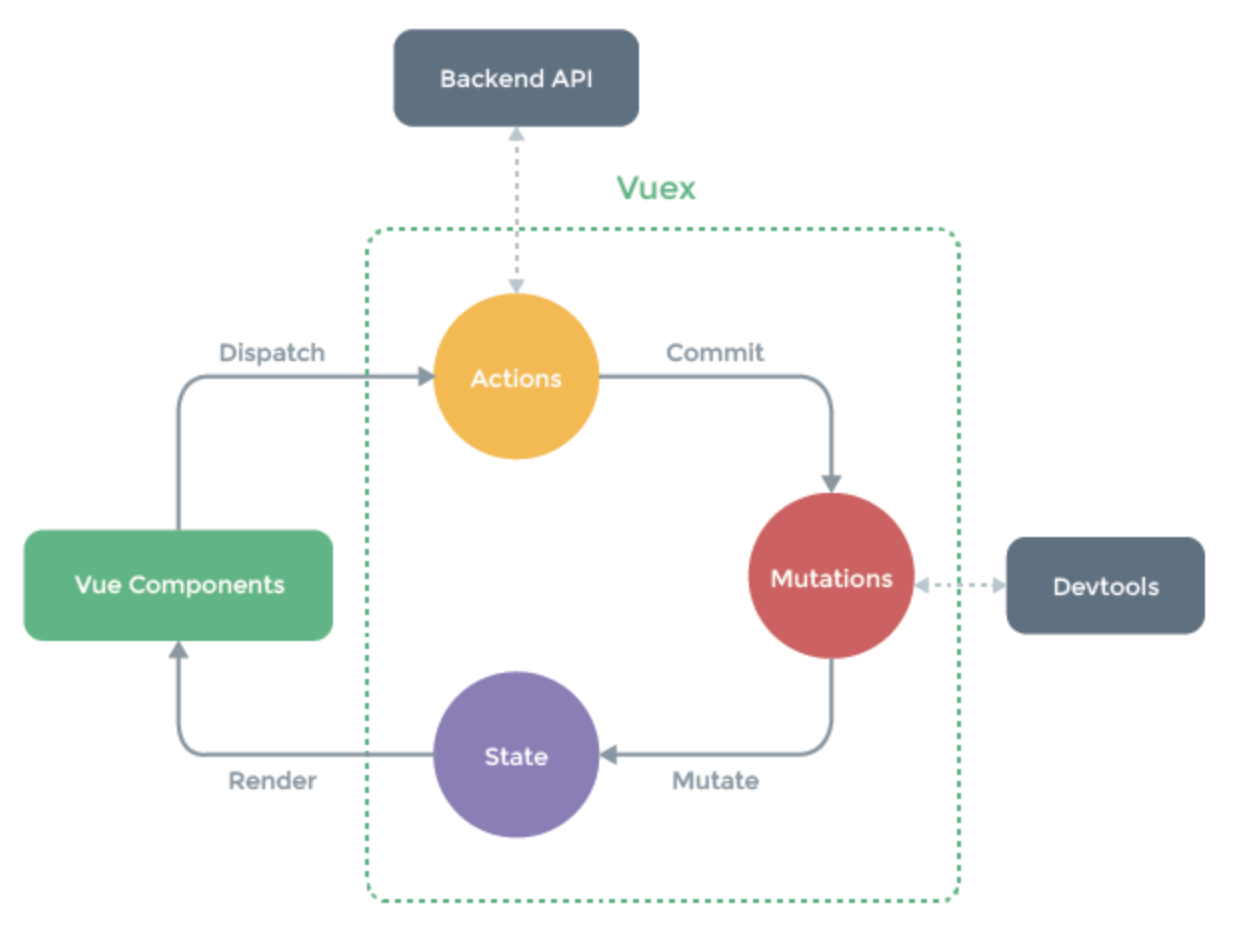
熬夜整理的vue面试题
Vue-router 路由模式有几种
vue-router 有 3 种路由模式:hash、history、abstract,对应的源码如下所示
switch (mode) {case history:this.history new HTML5History(this, options.base)breakcase hash:this.history new HashHistory(this, options…

网络安全设备之防火墙技术详解
一、防火墙概述
1、网络防火墙简介
无论是大中型企业网络,还是小型家庭办公网络,对网络安全方面的要求一直保持上升趋势。微软公司的官方网站尚且难逃黑客的魔爪,普通的中小网络更是难以抵抗了。解决网络安全问题最常用的防护手段就是安装网络防火墙,对于大中型规模的企业…
css实现流星划过动画
背景
👏渐变伪元素实现流星,translateY实现划过动画,速速来Get吧~ 🥇文末分享源代码。记得点赞关注收藏!
1.实现效果 2.实现原理 translateY(): translateY() 在页面垂直移动元素。 translateY(ty) 对应 …

上海亚商投顾:沪指重返3100点
上海亚商投顾前言:无惧大盘大跌,解密龙虎榜资金,跟踪一线游资和机构资金动向,识别短期热点和强势个股。 市场情绪三大指数今日低开高走,沪指重返3100点上方,深成指、创业板指午后均涨超2%。半导体板块掀涨停…
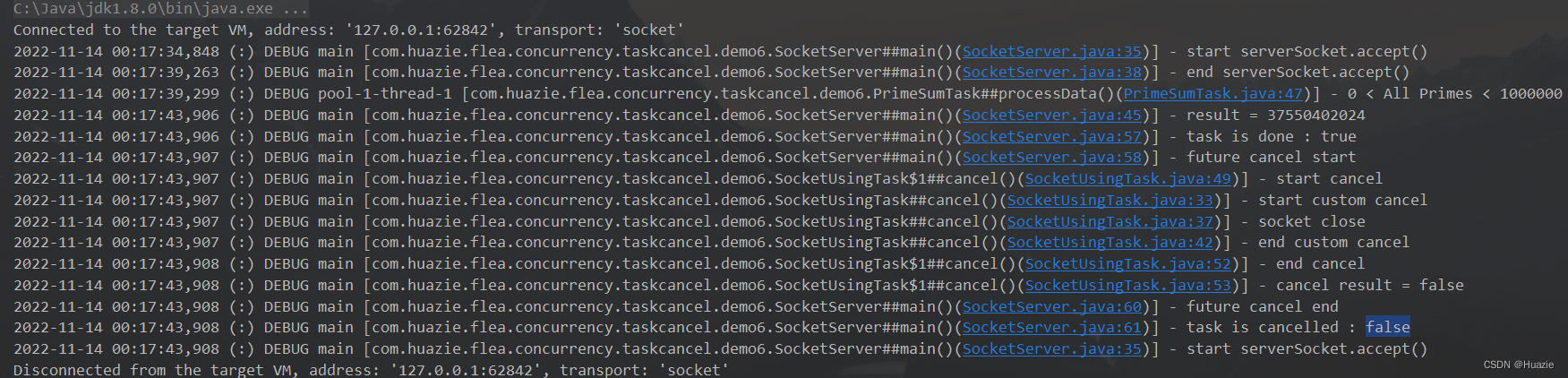
Java并发编程学习13-任务取消(下)
任务取消(下)
《任务取消》由于篇幅较多,拆分了两篇来介绍各种实现取消和中断的机制,以及如何编写任务和服务,使它们能对取消请求做出响应。
1. 任务限时运行
我们知道许多任务可能永远也无法处理完成(…
![[go学习笔记.第十四章.协程和管道] 3.协程配合管道案例以及管道的注意事项和使用细节](https://img-blog.csdnimg.cn/d68612e4d73440c087bd184ce9b55699.png)
[go学习笔记.第十四章.协程和管道] 3.协程配合管道案例以及管道的注意事项和使用细节
案例一 请完成goroutine和channel协同工作的案例,具体要求: (1).开启一个writeData协程,向管道intChan中写入50个整数. (2).开启一个readData协程,从管道intChan中读取writeData写入的数据 (3).注意: writeData和readD…
阿里内部目前最完整“Spring全线笔记”,不止是全家桶,太完整了
前言
对于每一位Java开发人员来说,提起Spring定是不陌生的,实际上自Spring框架诞生以来,就备受开发者的青睐,基本上现在的互联网公司都要使用到Spring框架。Spring框架中又包含了SpringMVC、SpringBoot、SpringCloud等࿰…

【前端】Vue+Element UI案例:通用后台管理系统-项目总结
文章目录相关链接前言效果登录页首页管理员的首页xiaoxiao的首页用户管理总结项目搭建左侧:CommonAside上侧:CommonHeader和CommonTag首页:Home.vue用户管理:User.vue登录页:Login.vue总代码相关链接
参考视频&#x…