1、系统运行时间周期-10ms
2、配置CAN通讯初始化---波特率:500k,测试用CAN0
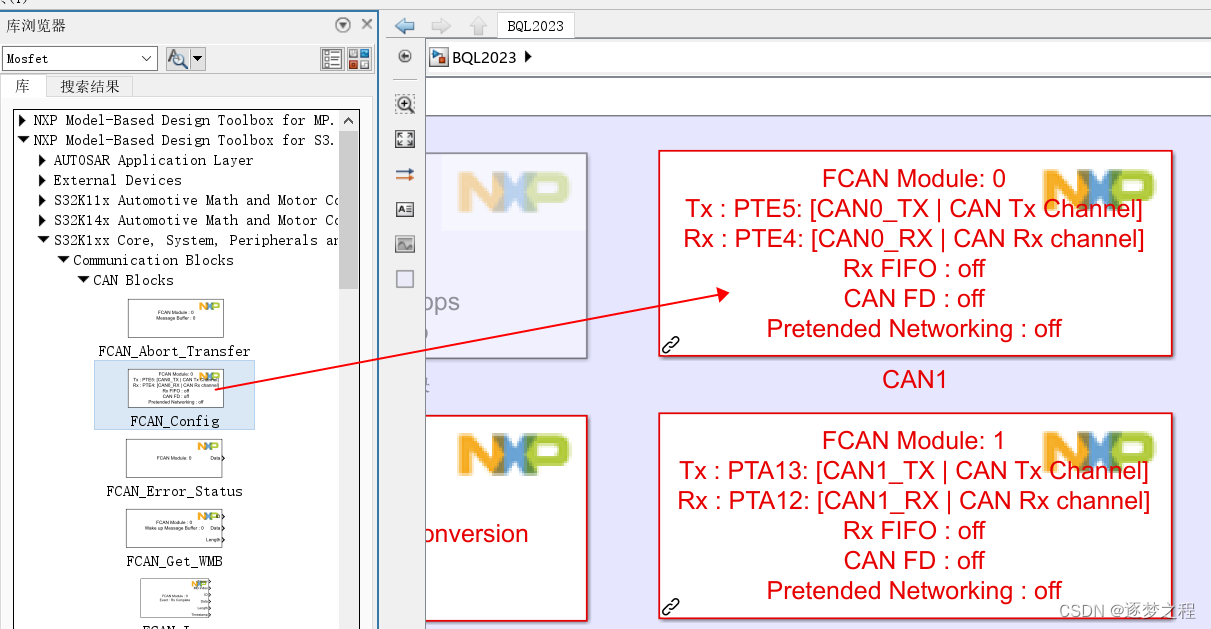


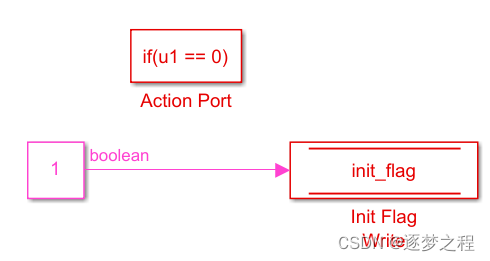
3、设置初始化配置优先级最高


4、清除CAN接受中断标志位初始化--仅运行一次,把要接受的CAN地址都要配置一下,如ID:0X245



5、建立全局变量--从单片机向外发送一个整数,单片机接受两个整数
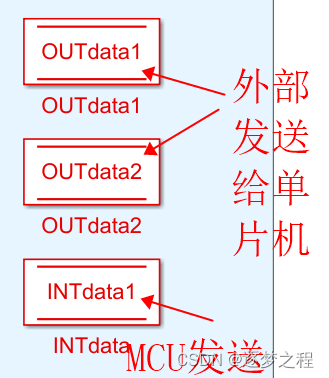
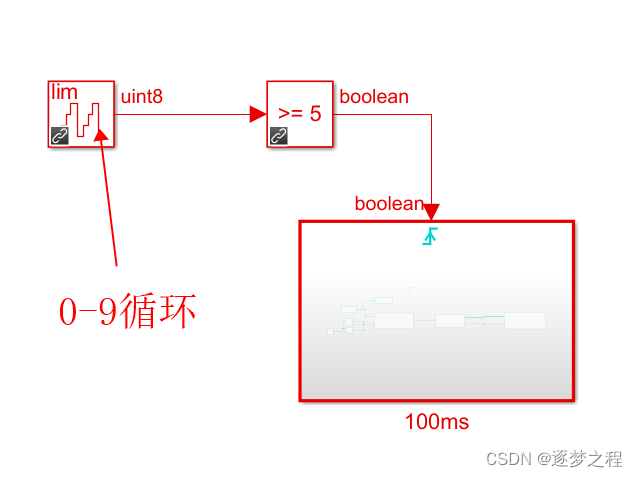
6、100ms循环-单片机向外发送一个整数,ID设置为0X369,并发送一个整数:本帧发送的次数

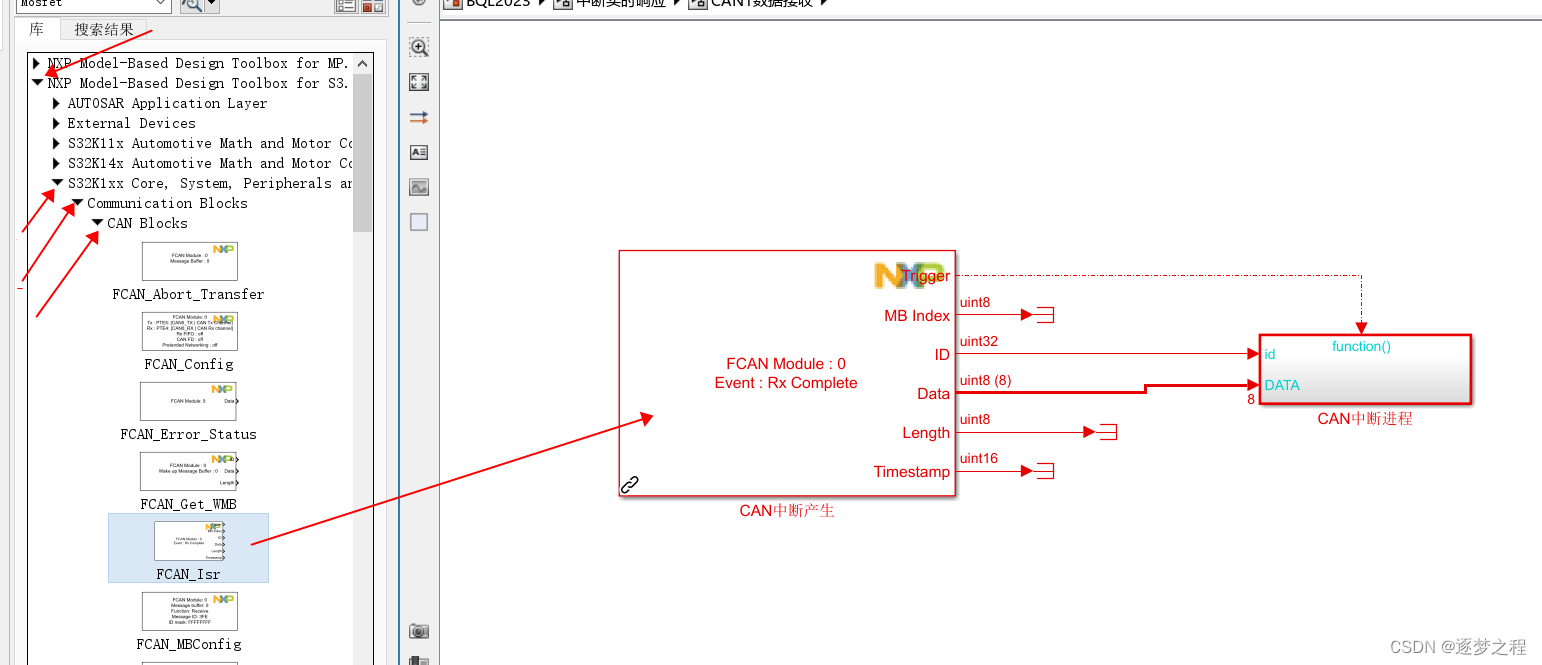
7、用CAN接受中断-接受CAN的数据
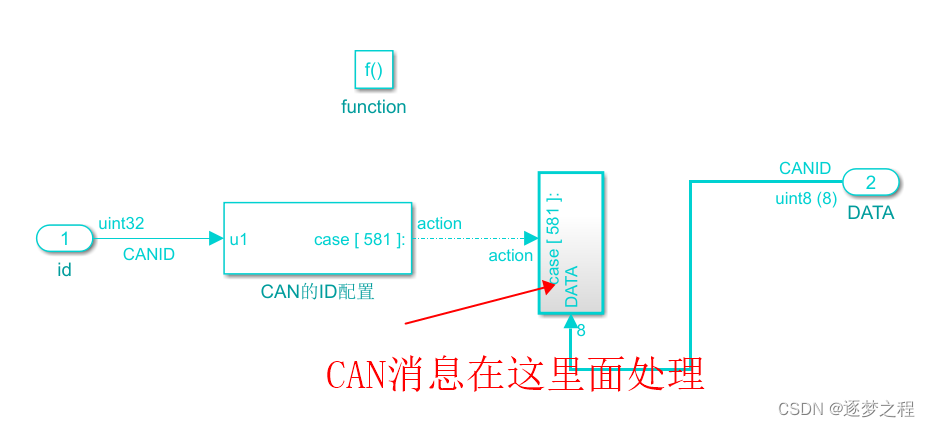
8、筛选CAN地址为0X245的CAN消息

9、编译下载并在FreeMASTE中调试验证CAN通讯,利用CAN卡和设备通讯,接收发送CAN消息

10、设置“INTdata1”分别为2,3,6;“OUTdata1”分别为1,4,9;“OUTdata2”分别为2,5,7
CAN数据看左边第一位
INTdata1 = 2,OUTdata1 = 1 , OUTdata2 = 2
CAN卡接收数据

CAN卡发送数据
![]()
FreeMASTE中输入与输出

INTdata1 = 3,OUTdata1 = 4 , OUTdata2 = 5
CAN卡接收数据

CAN卡发送数据
![]() FreeMASTE中输入与输出
FreeMASTE中输入与输出

INTdata1 = 6,OUTdata1 = 9 , OUTdata2 = 7
CAN卡接收数据
![]()
CAN卡发送数据
![]()
FreeMASTE中输入与输出

11、经核验正常



![[ 容器 ] Docker 的数据管理](https://img-blog.csdnimg.cn/e313cf57d675438d9cc1866a9806f7af.png)