常微分方程在诸多研究领域中有着广泛应用,本文希望向大家介绍笔者于近期开发的R包ecode,该包采用简洁易懂的语法帮助大家在R环境中构建常微分方程,并便利地调用R图形接口,研究常微分方程系统的相速矢量场、平衡点、稳定点等解析性质,或进行数值模拟,进行敏感性分析等。
下载与安装
目前,ecode包只有测试版,并已挂载到了github平台上,详见HaoranPopEvo/ecode。安装步骤如下:
- 在网页中下载名为"ecode_0.0.0.9000.tar.gz"的压缩包。
- 在RStudio中单击“Tools > Install Packages…”,在弹出的对话框中选择Package Archive (.zip; .tar.gz),点击Browsing…按钮,在打开的文件浏览对话框中找到文件"ecode_0.0.0.9000.tar.gz",点击Install按钮,完成安装。
然后将ecode包载入到R环境中:
library(ecode)
构建模型
要构建一个常微分方程系统,首先要利用eode()函数。现考虑构建Lotka–Volterra竞争模型:
d
x
d
t
=
(
r
1
−
a
11
x
−
a
12
y
)
x
,
(
1
)
d
y
d
t
=
(
r
2
−
a
21
x
−
a
22
y
)
y
,
(
2
)
\frac{dx}{dt}=(r_1-a_{11}x-a_{12}y)x, \quad (1) \\ \frac{dy}{dt}=(r_2-a_{21}x-a_{22}y)y, \quad (2)
dtdx=(r1−a11x−a12y)x,(1)dtdy=(r2−a21x−a22y)y,(2)
其中,
x
x
x代表物种1的种群个体数,
x
x
x代表物种2的种群个体数,
r
1
,
r
2
r_1, r_2
r1,r2为种群增长率,
a
11
,
a
12
,
a
21
,
a
22
a_{11},a_{12},a_{21},a_{22}
a11,a12,a21,a22为两物种之间的竞争系数。
该模型中, x , y x,y x,y为模型变量, r 1 , r 2 , a 11 , a 12 , a 21 , a 22 r_1, r_2, a_{11},a_{12},a_{21},a_{22} r1,r2,a11,a12,a21,a22为模型参数。
要在ecode包中构建该模型,可以运行如下代码:
eq1 <- function(x, y, r1 = 4, a11 = 1, a12 = 2) (r1 - a11 * x - a12 * y) * x
eq2 <- function(x, y, r2 = 1, a21 = 2, a22 = 1) (r2 - a21 * x - a22 * y) * y
x <- eode(dxdt = eq1, dydt = eq2)
print(x)
### An ODE system: 2 equations
### equations:
### dxdt = (r1 - a11 * x - a12 * y) * x
### dydt = (r2 - a21 * x - a22 * y) * y
### variables: x y
### parameters: r1 = 4, a11 = 1, a12 = 2, r2 = 1, a21 = 2, a22 = 1
### constraints: x<1000 x>0 y<1000 y>0
其中,等式(1)被表示在R函数对象eq1中,等式(2)被表示在R函数对象eq2中。
x
,
y
x,y
x,y为模型变量,故函数eq1()和eq2()的定义中,参数x, y都没有缺省值。
r
1
,
r
2
,
a
11
,
a
12
,
a
21
,
a
22
r_1, r_2, a_{11},a_{12},a_{21},a_{22}
r1,r2,a11,a12,a21,a22为模型参数,因此在函数eq1()和eq2()的定义中,它们都被赋上了缺省值。本案例中,
r
1
=
4
,
r
2
=
1
,
a
11
=
1
,
a
12
=
2
,
a
21
=
2
,
a
22
=
1
r_1=4,r_2=1, a_{11}=1, a_{12}=2,a_{21}=2, a_{22}=1
r1=4,r2=1,a11=1,a12=2,a21=2,a22=1
R语言中函数的语法
在R语言中,若需要自定义一个函数,其语法为:
fun <- function(x, y, a = 1, b = 2) { x = a + b + x; return(x + y) }
其中,fun为函数对象,function用于声明一个函数,()中的部分为函数头,{}中的内容为函数体。函数头被用于定义形式参数x, y, a, b,其中,形式参数x, y没有缺省值,形式参数a的缺省值为1,形式参数b的缺省值为2。函数体部分用于实施计算,并给出返回值。函数体中有多个语句时,可以分成多行来书写;当函数体只含有一行时,花括号{}可以省略不写。return()函数用于给出函数的返回值。当return()函数被省略时,函数的返回值为函数体中最后一个语句的计算结果。
定义好两个等式后,便可以通过eode()函数创建常微分方程系统。其语法为:
eode(dx1dt = eq1, dx2dt = eq2, ..., constraint = NULL)
其中,dx1dt、dx2dt为等式的名称,eq1、eq2是用于定义等式的函数对象。如果需要定义的常微分方程系统中不止有两个等式,可以在...部分继续添加其他变量。constraint变量用于定义模型变量的范围。若不指定constraint变量,则eode()函数会自动把所有模型变量的范围设置在(0, 1000)的范围内。例如,在上述代码中,调用print()函数打印x的值后,其输出内容含有:
### constraints: x<1000 x>0 y<1000 y>0
这表明,模型变量 x , y x, y x,y满足 0 < x < 1000 , 0 < y < 1000 0<x<1000, 0<y<1000 0<x<1000,0<y<1000。如果要限制 x , y x,y x,y在(0, 500)内,则可以使用:
x <- eode(dxdt = eq1, dydt = eq2, constraint = c("x<500", "y<500"))
x
### An ODE system: 2 equations
### equations:
### dxdt = (r1 - a11 * x - a12 * y) * x
### dydt = (r2 - a21 * x - a22 * y) * y
### variables: x y
### parameters: r1 = 4, a11 = 1, a12 = 2, r2 = 1, a21 = 2, a22 = 1
### constraints: x<500 x>0 y<500 y>0
如果要限制 x , y x,y x,y在[100, 500)内,则可以使用:
x <- eode(dxdt = eq1, dydt = eq2, constraint = c("x<500", "y<500", "x>=100", "y>=100"))
x
### An ODE system: 2 equations
### equations:
### dxdt = (r1 - a11 * x - a12 * y) * x
### dydt = (r2 - a21 * x - a22 * y) * y
### variables: x y
### parameters: r1 = 4, a11 = 1, a12 = 2, r2 = 1, a21 = 2, a22 = 1
### constraints: x<500 x>=100 y<500 y>=100
eode()函数的返回对象的类别是"eode"。这种类别的对象是ecode包中的核心对象。这种对象用于存放有关常微分方程系统的信息,并得以调用其他复杂的函数,来研究该常微分方程系统的性质。
class(x)
### [1] "eode"
相速矢量场
模型构建完成后,就可以简单地调用plot()函数,绘制模型的相速矢量场,
plot(x)
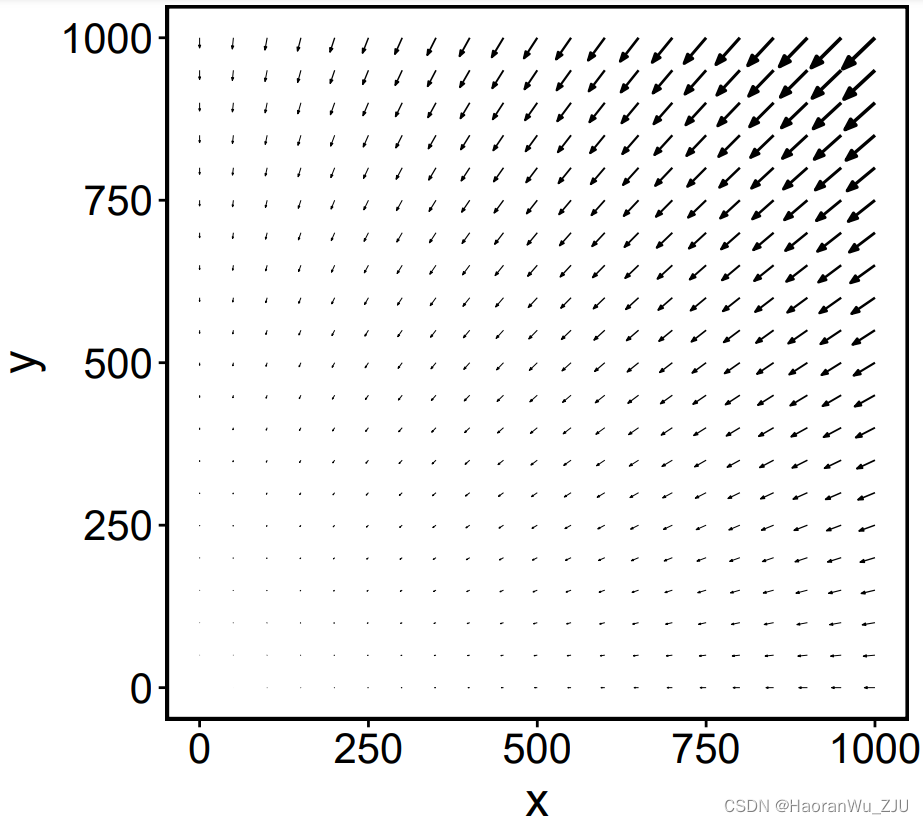
图中的横轴、纵轴分别代表模型变量
x
,
y
x, y
x,y的值,每个箭头代表系统在某一相点
(
x
,
y
)
(x, y)
(x,y)时的相速矢量。箭头的长短代表相速矢量的大小,箭头越长代表相速矢量的绝对值越大,即相点在该处的运动速度很快。箭头的方向代表相点在该处时的运动方向。该图表明,相点似乎无论如何都会沿着原点
(
0
,
0
)
(0,0)
(0,0)处运动。
修改模型变量的范围
我们可能需要进一步观察
x
,
y
∈
(
0
,
2
)
x,y∈(0,2)
x,y∈(0,2)时的相速矢量场。这时,我们可以通过eode_set_constraint()函数更改模型变量的限制条件:
x <- eode_set_constraint(x, c("x<2", "y<2"))
x
### An ODE system: 2 equations
### equations:
### dxdt = (r1 - a11 * x - a12 * y) * x
### dydt = (r2 - a21 * x - a22 * y) * y
### variables: x y
### parameters: r1 = 4, a11 = 1, a12 = 2, r2 = 1, a21 = 2, a22 = 1
### constraints: x<2 x>0 y<2 y>0
随后重新绘制系统的相速矢量场:
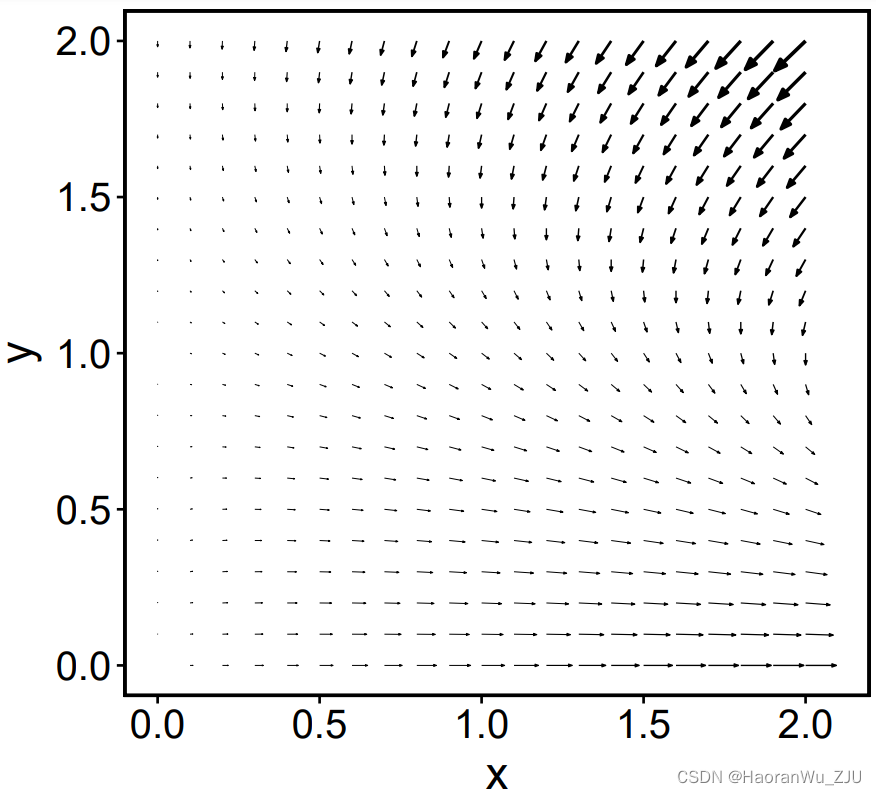
可以发现,当相点较小时(例如
(
x
,
y
)
=
(
1
,
1
)
(x,y)=(1,1)
(x,y)=(1,1)),相点并不会朝着
(
0
,
0
)
(0,0)
(0,0)点运动,而是沿着
x
x
x增大、
y
y
y减小的方向移动。
如何引用
Wu, H. (2023). ecode: An R package to investigate community dynamics in ordinary differential equation systems. bioRxiv, 2023-06.
原文见bioRxiv。







![[golang gin框架] 41.Gin商城项目-微服务实战之后台Rbac微服务(用户登录 、Gorm数据库配置单独抽离、 Consul配置单独抽离)](https://img-blog.csdnimg.cn/fdfc04e10b6c45d794307dfcf0c0c753.png)