背景: 为了方便调整摄像头的高度,我需要重新构建以下带小车的模型。小白分享来了。
目录
1. 先构建一个能跑的小车。
1.1 gazebo设计四个物体:车体+三个车轮。组合然后构建好后在本地保存成小车模型。
1.2 打开本地文件添加plugin插件,保存。
1.3 gazebo重新导入本地小车模型,终端输入运动控制指令验证模型最终是否能被控制运动。
2. 构建一个带摄像和和红外功能的部件。
2.1 gazebo设计3个物体:基体+两个部件。组合然后构建好后在本地保存成检测模型。
2.2 打开本地文件添加sensor传感器和plugin插件,保存。
2.3 gazebo重新导入本地检测模型,终端输入ros2指令验证模型最终是否能输出topic。
3. 将构建的两个模型组合起来,然后在本地保存成最终的带摄像和红外功能的小车模型。
再保存一次整体模型,想要调整相机高度的时候就直接,点击箭四个箭头的图标,然后直接在Z方向上拖动就行了。编辑
1. 先构建一个能跑的小车。
1.1 gazebo设计四个物体:车体+三个车轮。组合然后构建好后在本地保存成小车模型。
1) 打开gazebo,进入模型编辑模式。
$ gazebo然后点击 Edit菜单 -> Model Editor。
下面的链接很详细
gazebo入门教程(二)建立简单模型_gazebo模型_breeze_csdn的博客-CSDN博客
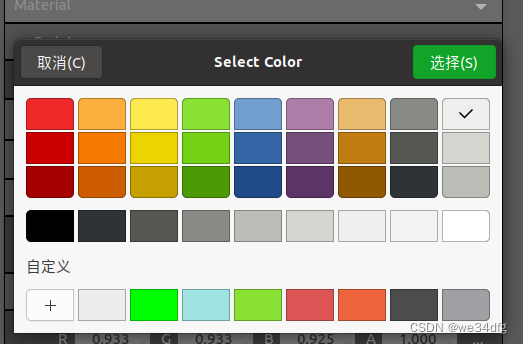
就是我想添加简单的部件纯颜色的添加。就在Open Link Inspector的弹窗里,Visual里可以设置
点击...,就可以直接在调色板里选择。如下图所示。
1.2 打开本地文件添加plugin插件,保存。
之前保存的模型里有model.sdf文件,打开它。在 </model>前面添加
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros/>
<left_joint>link_0_0_JOINT_0</left_joint> # TODO:左轮link名字
<right_joint>link_0_0_JOINT_1</right_joint> # TODO:右轮link名字
<wheel_separation>0.35</wheel_separation>
<wheel_diameter>0.1</wheel_diameter>
<max_wheel_torque>180</max_wheel_torque>
<max_wheel_acceleration>8.0</max_wheel_acceleration>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>link_0_0</robot_base_frame>
<publish_odom>1</publish_odom>
<publish_odom_tf>1</publish_odom_tf>
<publish_wheel_tf>1</publish_wheel_tf>
</plugin>
</model> # 这是为了位置提示
</sdf>其中这个libgazebo_ros_diff_drive.so的插件,
与/opt/ros/galactic/include/gazebo_plugins/gazebo_ros_diff_drive.hpp相对应,里面有说明。
1.3 gazebo重新导入本地小车模型,终端输入运动控制指令验证模型最终是否能被控制运动。

(1)点击Add Path,选择刚才保存的模型路径, /xxx/ 这一级。(例如car_model保存在 /xxx/)
(2)然后选择car_model,添加模型。
(3)打开一个终端,输入命令后,小车会动起来。
ros2 run teleop_twist_keyboard teleop_twist_keyboard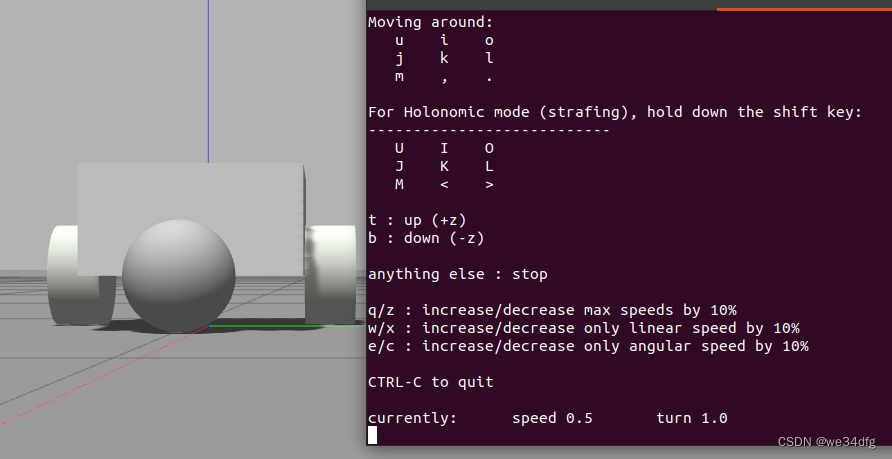
2. 构建一个带摄像和和红外功能的部件。
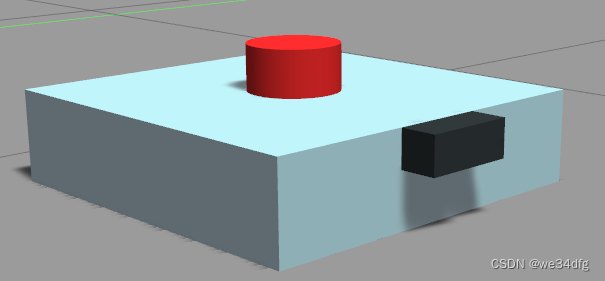
2.1 gazebo设计3个物体:基体+两个部件。组合然后构建好后在本地保存成检测模型。
当会构建小车后,三个固定部件也能构建。其中黑色的用作camera,红色的用作红外。
2.2 打开本地文件添加sensor传感器和plugin插件,保存。
之前保存的模型里有model.sdf文件,打开它。
1)在 当作摄像头的 </link>前面添加
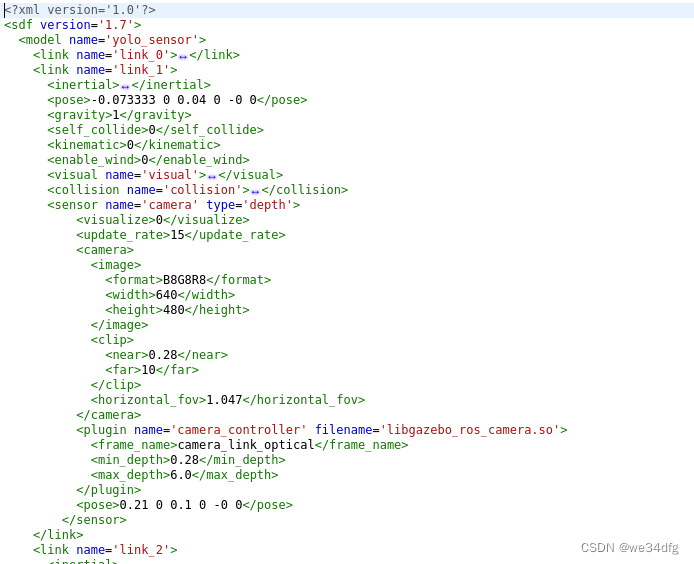
<sensor name='camera' type='depth'>
<visualize>0</visualize>
<update_rate>15</update_rate>
<camera>
<image>
<format>B8G8R8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.28</near>
<far>10</far>
</clip>
<horizontal_fov>1.047</horizontal_fov>
</camera>
<plugin name='camera_controller' filename='libgazebo_ros_camera.so'>
<frame_name>camera_link_optical</frame_name>
<min_depth>0.28</min_depth>
<max_depth>6.0</max_depth>
</plugin>
<pose>0.21 0 0.1 0 -0 0</pose>
</sensor>2)在 当作红外的 </link>前面添加
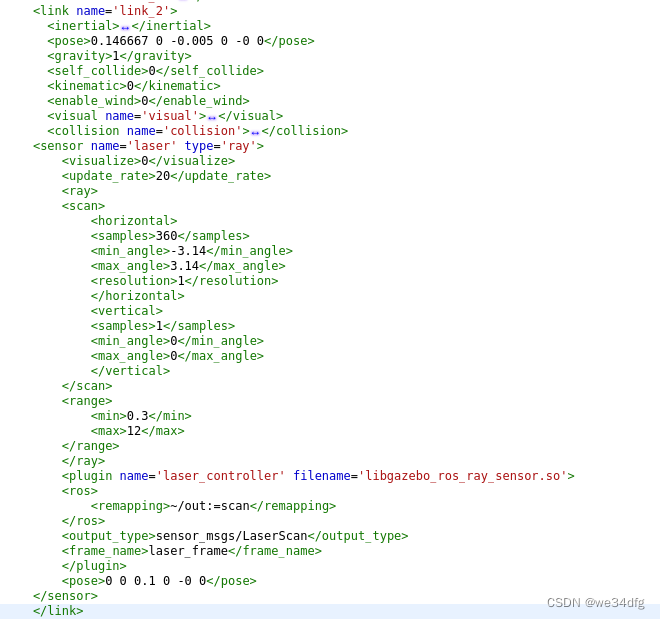
<sensor name='laser' type='ray'>
<visualize>0</visualize>
<update_rate>20</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<min_angle>-3.14</min_angle>
<max_angle>3.14</max_angle>
<resolution>1</resolution>
</horizontal>
<vertical>
<samples>1</samples>
<min_angle>0</min_angle>
<max_angle>0</max_angle>
</vertical>
</scan>
<range>
<min>0.3</min>
<max>12</max>
</range>
</ray>
<plugin name='laser_controller' filename='libgazebo_ros_ray_sensor.so'>
<ros>
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser_frame</frame_name>
</plugin>
<pose>0 0 0.1 0 -0 0</pose>
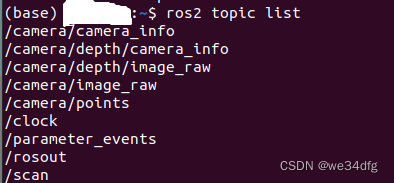
</sensor>2.3 gazebo重新导入本地检测模型,终端输入ros2指令验证模型最终是否能输出topic。
(1)点击Add Path,选择刚才保存的模型路径, /xxx/ 这一级。(例如camera_model保存在 /xxx/)
(2)然后选择camera_model,添加模型。
(3)打开一个终端,输入ros2命令后,会有topic显示。
3. 将构建的两个模型组合起来,然后在本地保存成最终的带摄像和红外功能的小车模型。
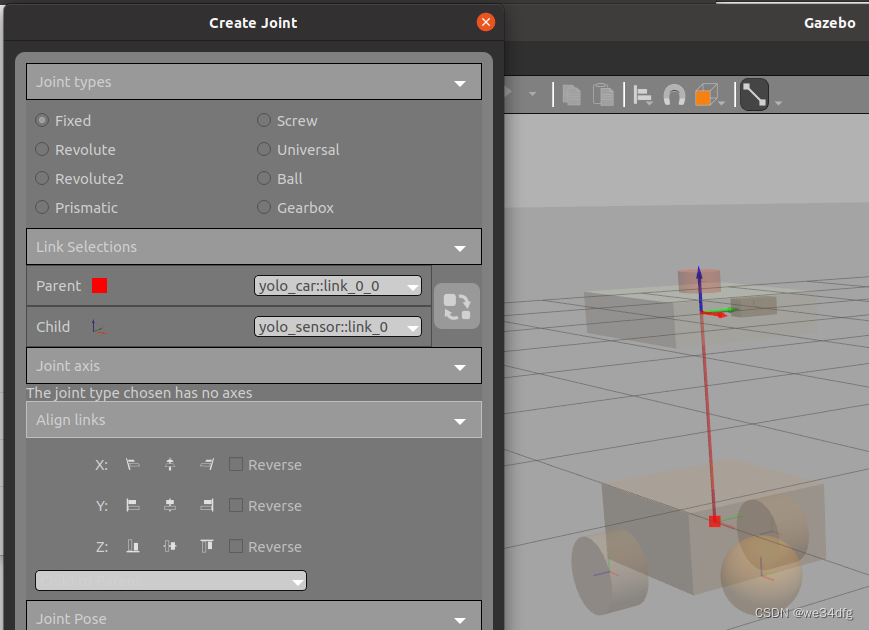
1) 进入模型编辑模式, 添加两个模型,并上下对齐,然后joint 连接。
再保存一次整体模型,想要调整相机高度的时候就直接,点击箭四个箭头的图标,然后直接在Z方向上拖动就行了。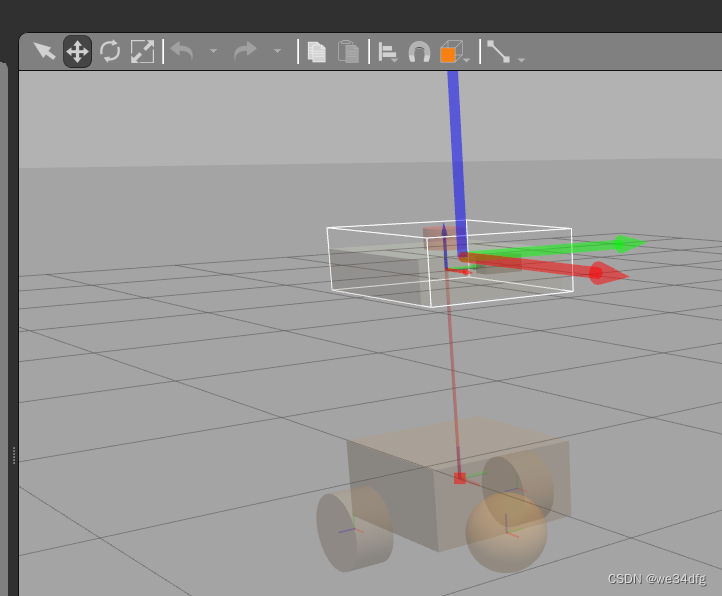
然后再重新保存模型。