一、介绍
1. 特点
流量稳定、改变流量(水阀):测量当前流量,与预期流量进行比对,不相等则进行相应的调整。
2. 适用系统
适用线性系统(二阶以内的线性系统):齐次性、叠加性
3. 宏观意义
PID准确度95%
二、概述
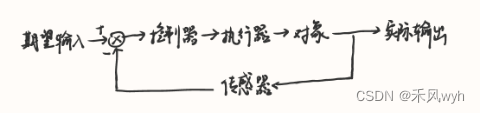
1. 控制系统
① 开环控制系统
a. 一般开环控制系统

缺点:没有形成反馈,仅仅根据自己的经验进行调整
b. 前馈控制系统

② 闭环控制系统
a. 单闭环
b. 双闭环

③ 复合控制系统

④ 参数详解
a. 误差
b. 控制器输出
c. 执行器输出
d. 系统输出
2. 连续与离散信号
① 图形表示


② 信号算式表示
三、PID公式
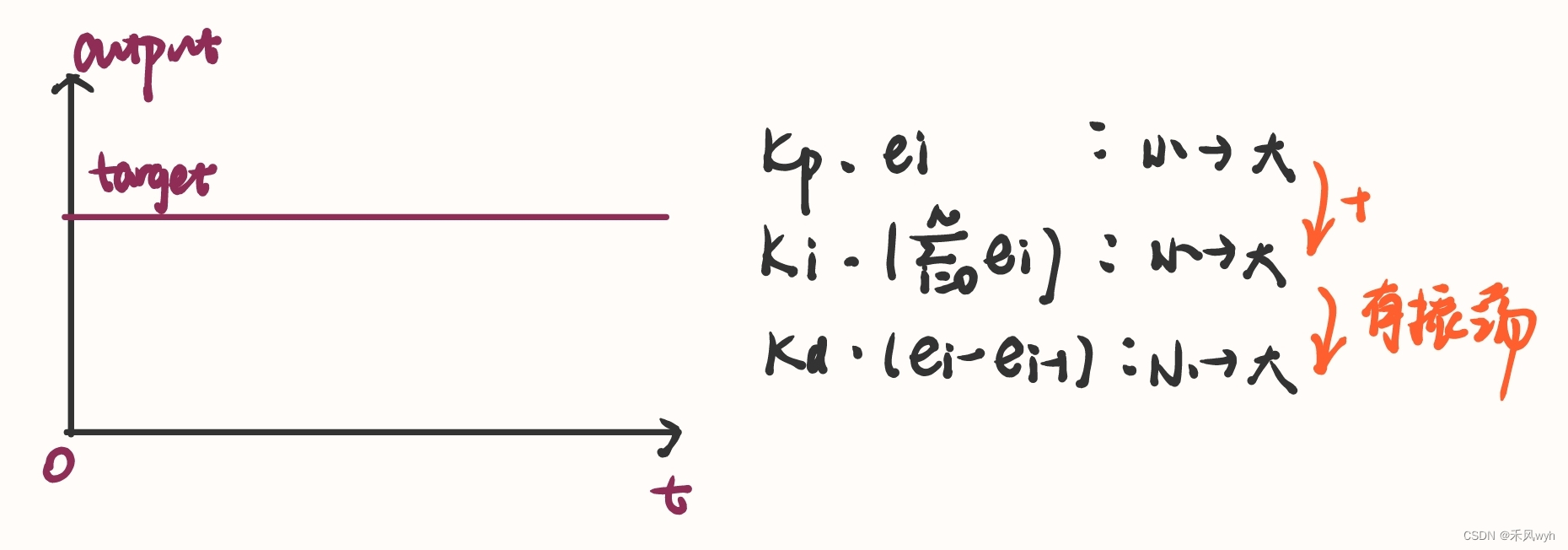
1. 抽象解释
其中,e = 期望输出 - 实际输出,p为实验比例度,Ti为积分时间,Td为微分时间;
连续:
离散:(把分母与系数相合)
2. 形象解释
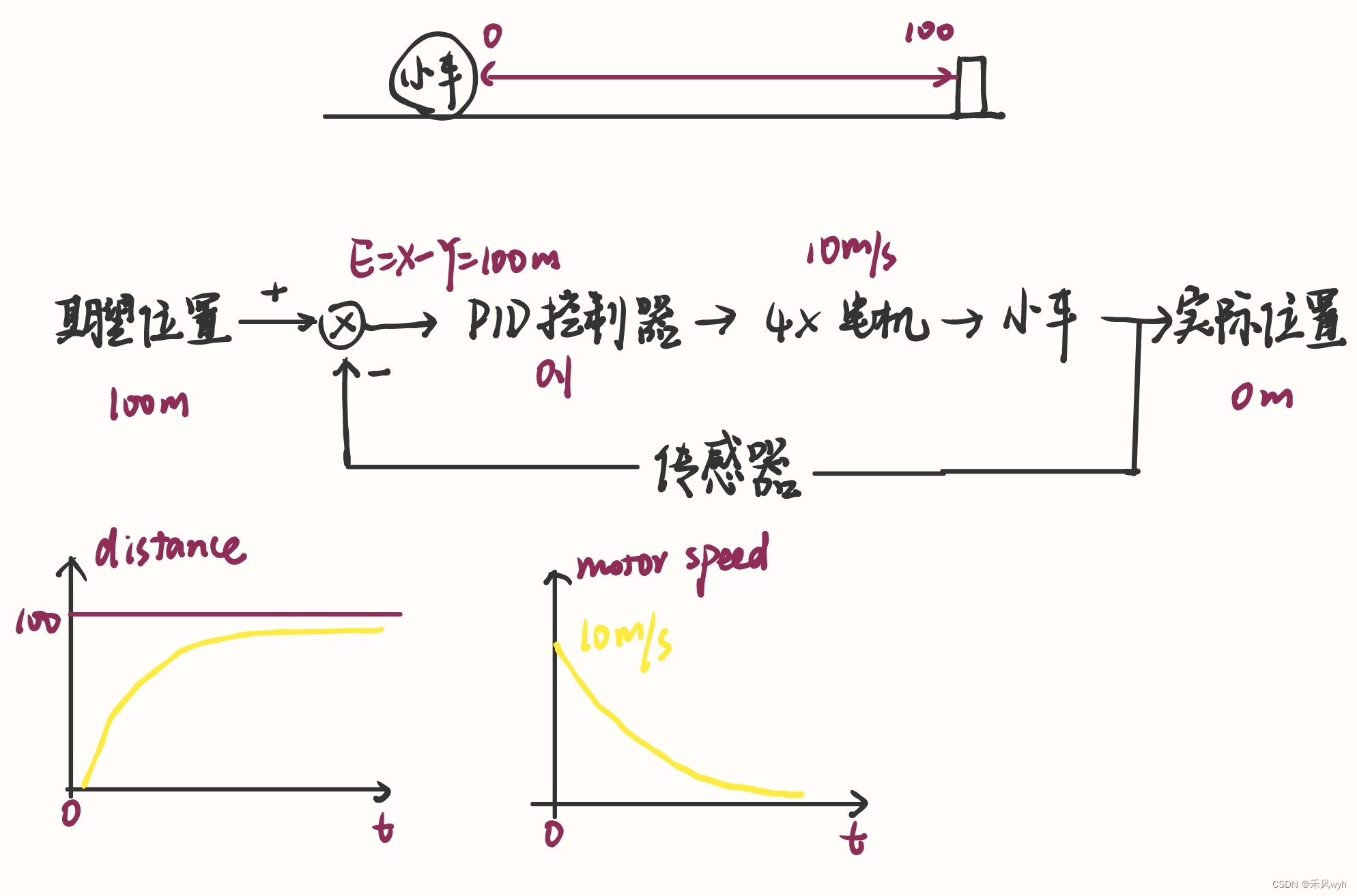
解释:期望位置为100m,PID控制器的控制p为0.1。当位置为0m的时候,误差为100-0=100m,电机速度变为100*0.1=10m/s,小车则会移动,移动之后会以实际位置的方式返回。随着时间和位置的推移,速度会随之改变。


3. PID参数整定
4. 其余控制知识
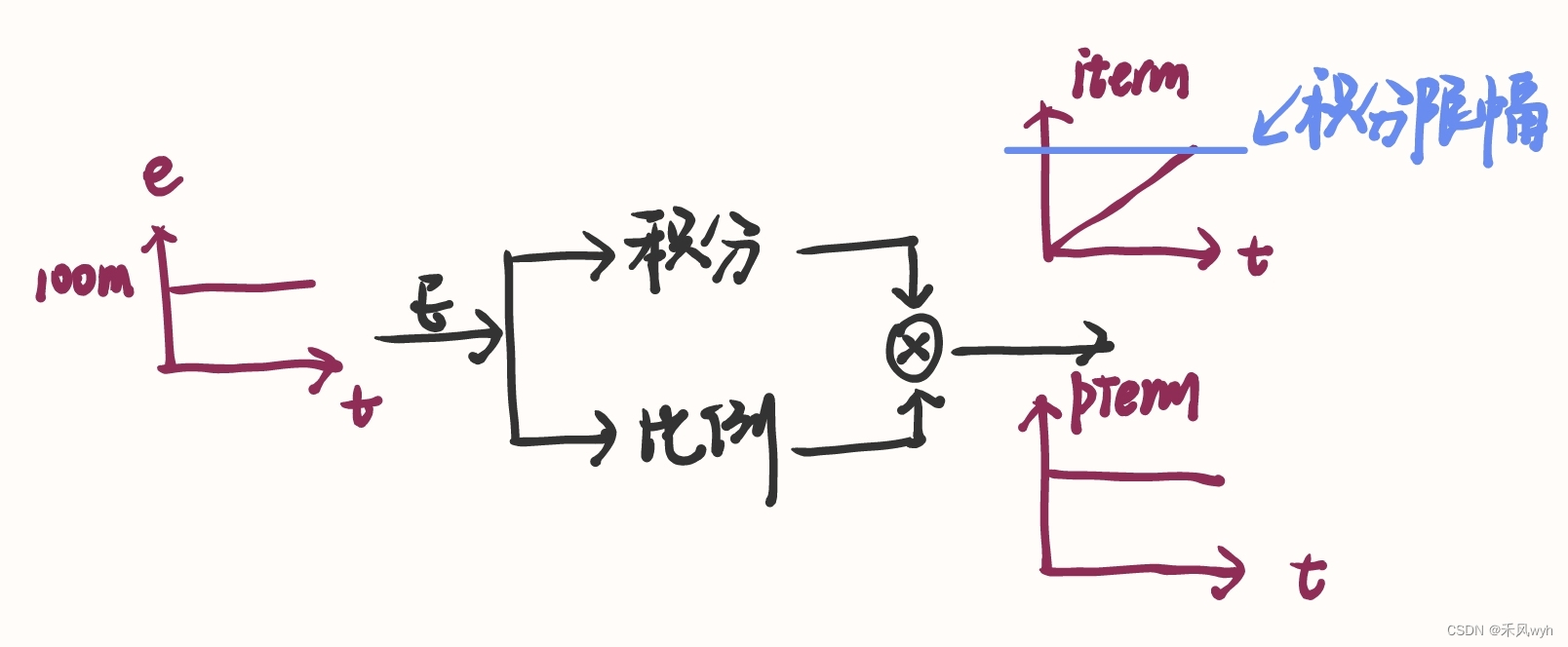
① 积分限幅