1、尺寸变换
1.1 图像差值原理

1.2 图像缩放、翻转、拼接
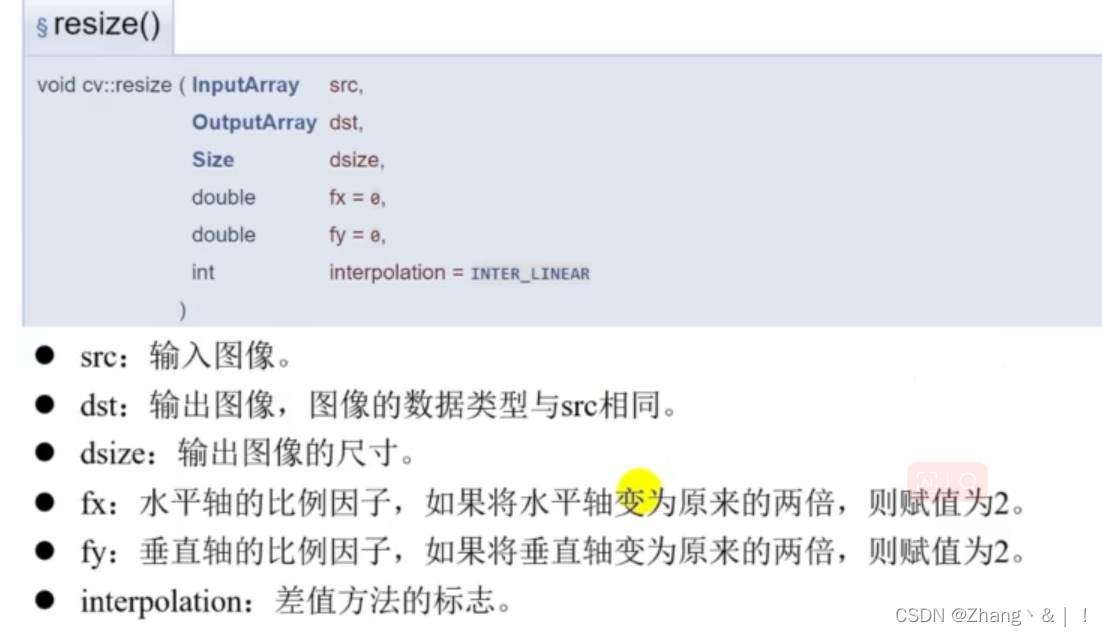
1.2.1 图像缩放
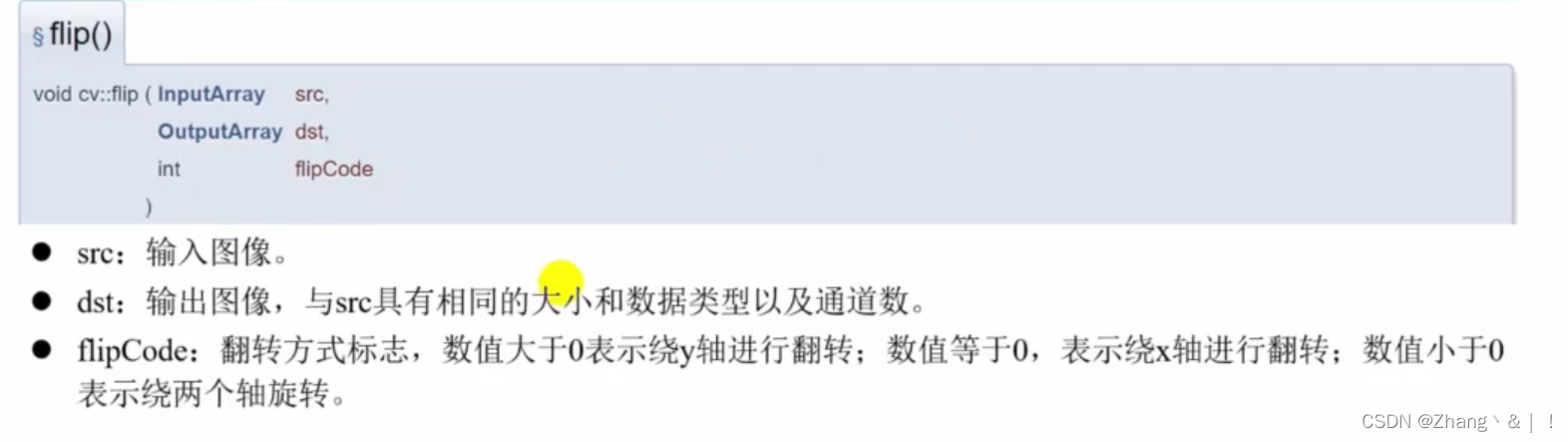
1.2.2 图像翻转
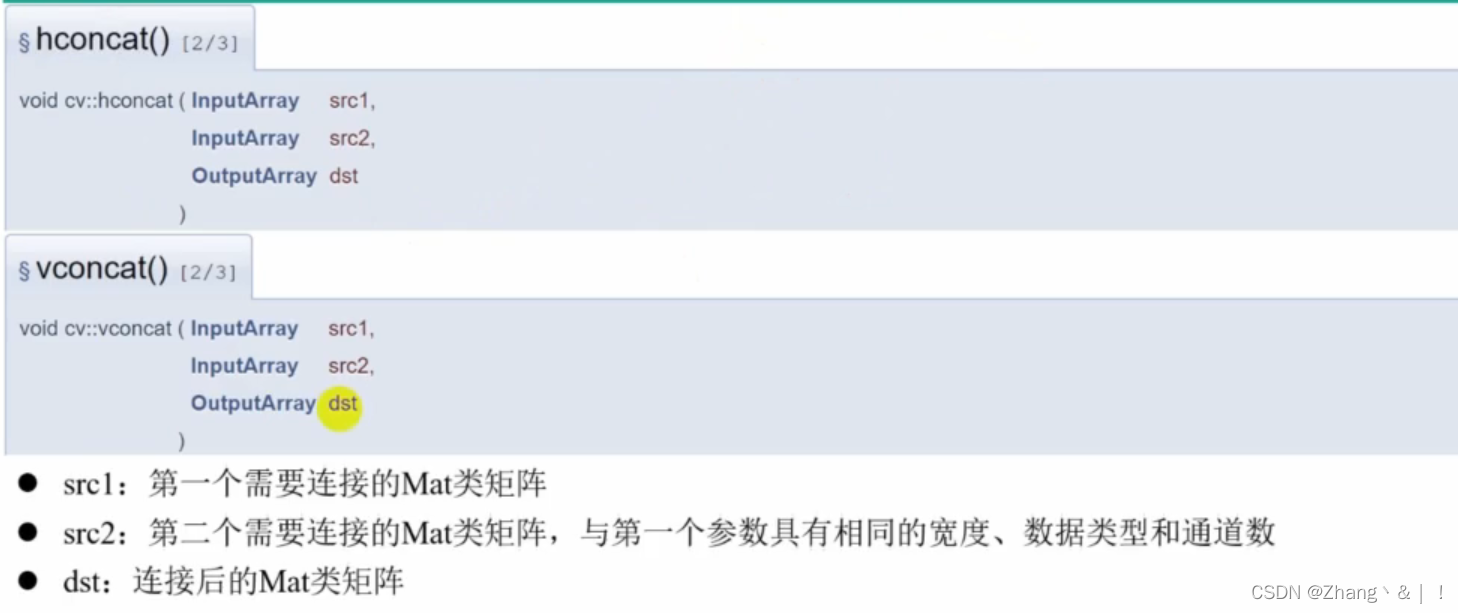
1.2.3 图像拼接
#include <iostream>
#include <fstream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat gray = imread(" lena.png",IMREAD_GRAYSCALE);
Mat sma1lImg,bigImg0,biglmg1,bigImg2;
resize(gray, sma1lImg,Size(15, 15), 0, 0, INTER_AREA);//先将图像缩小resize(smalllmg,bigImg0,Size(30,30),0,0,INTER_NEAREST);//最近邻差值resize(smallImg,bigImgl,Size(30,30),0,0,INTER_LINEAR);//双线性差值resize(smalllmg,bigImg2,Size(30,30),0,0,INTER_CUBIC);//双三次差值
Mat img_x,img_y,img_xy;
flip(gray,img_x,0);// 沿x轴对称
flip(gray,img_y,1);//沿y轴对称
flip(gray,img_xy, -1); //先x轴对称,再y轴对称
Mat img00 = imread("lena00.png");
Mat img01 = imread("lena01.png");
Mat img10 = imread("lena10.png") ;
Mat imgl1 = imread("lenal1.png" );
//图像连接
Mat img,img0,imgl;//图像横向连接
hconcat(img00,img01,img0);
hconcat(img10, imgl1, imgl);//横向连接结果再进行竖向连接
vconcat(img0, imgl, img);
waitKey(0);
system("pause");
return 0;
}2、仿射变换
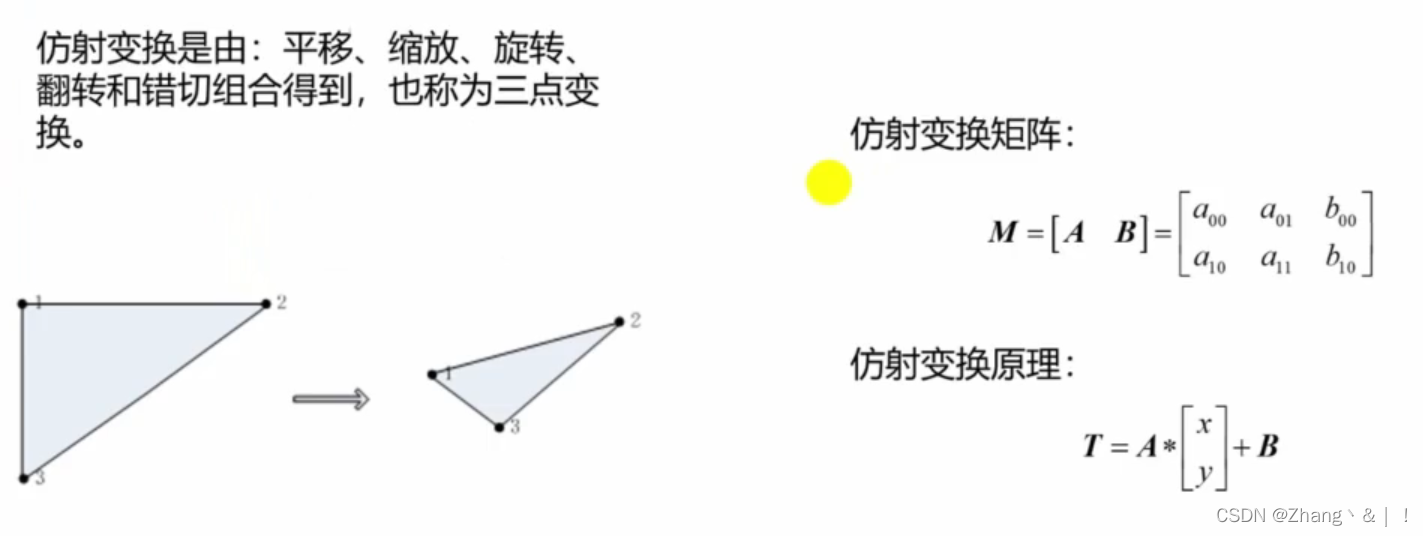
2.1 仿射变换原理
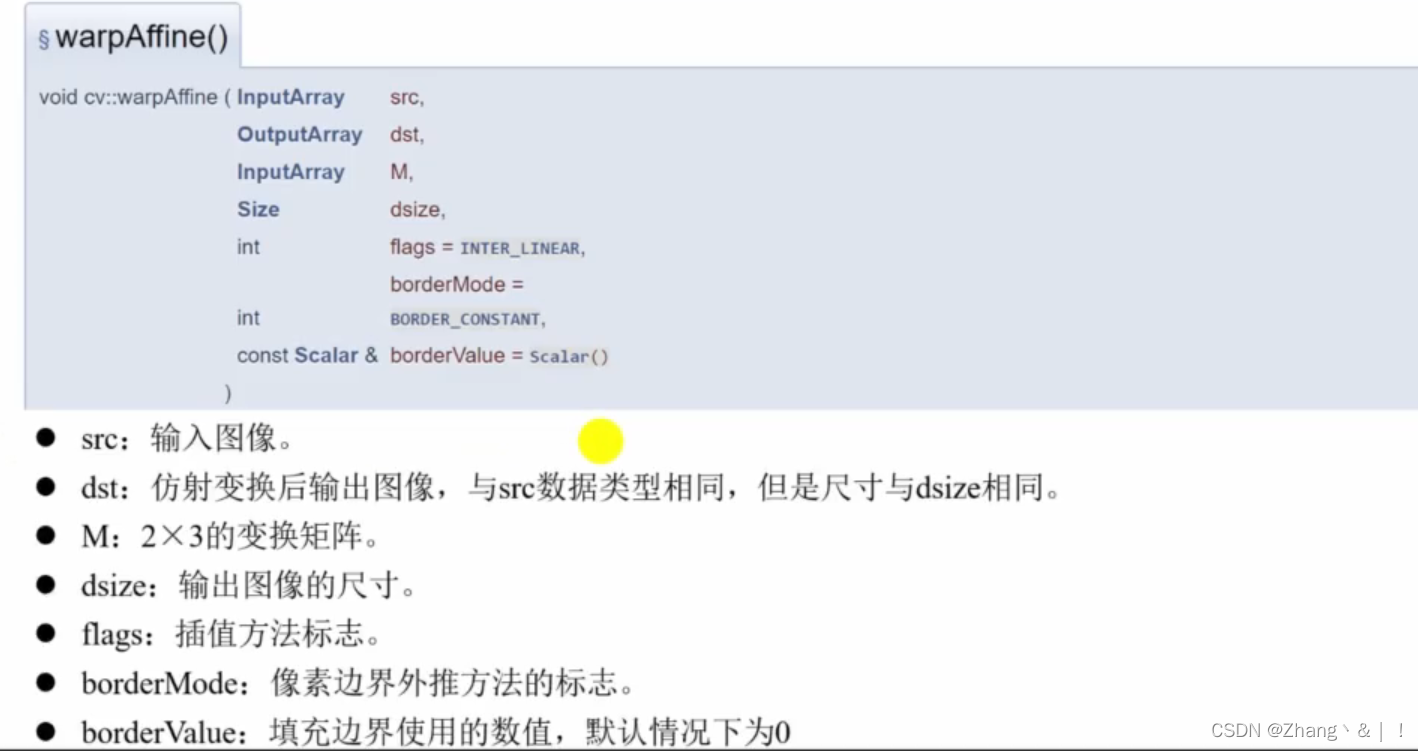
2.2 仿射变换函数
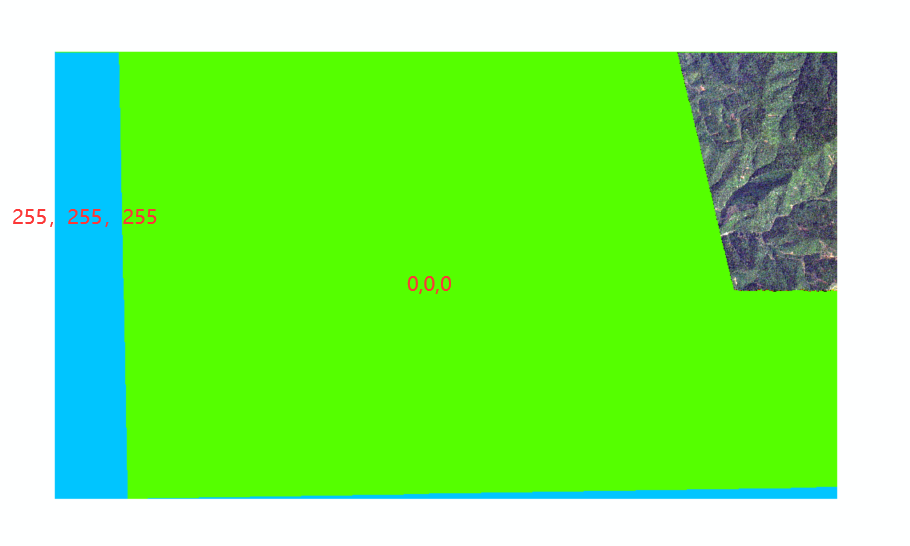
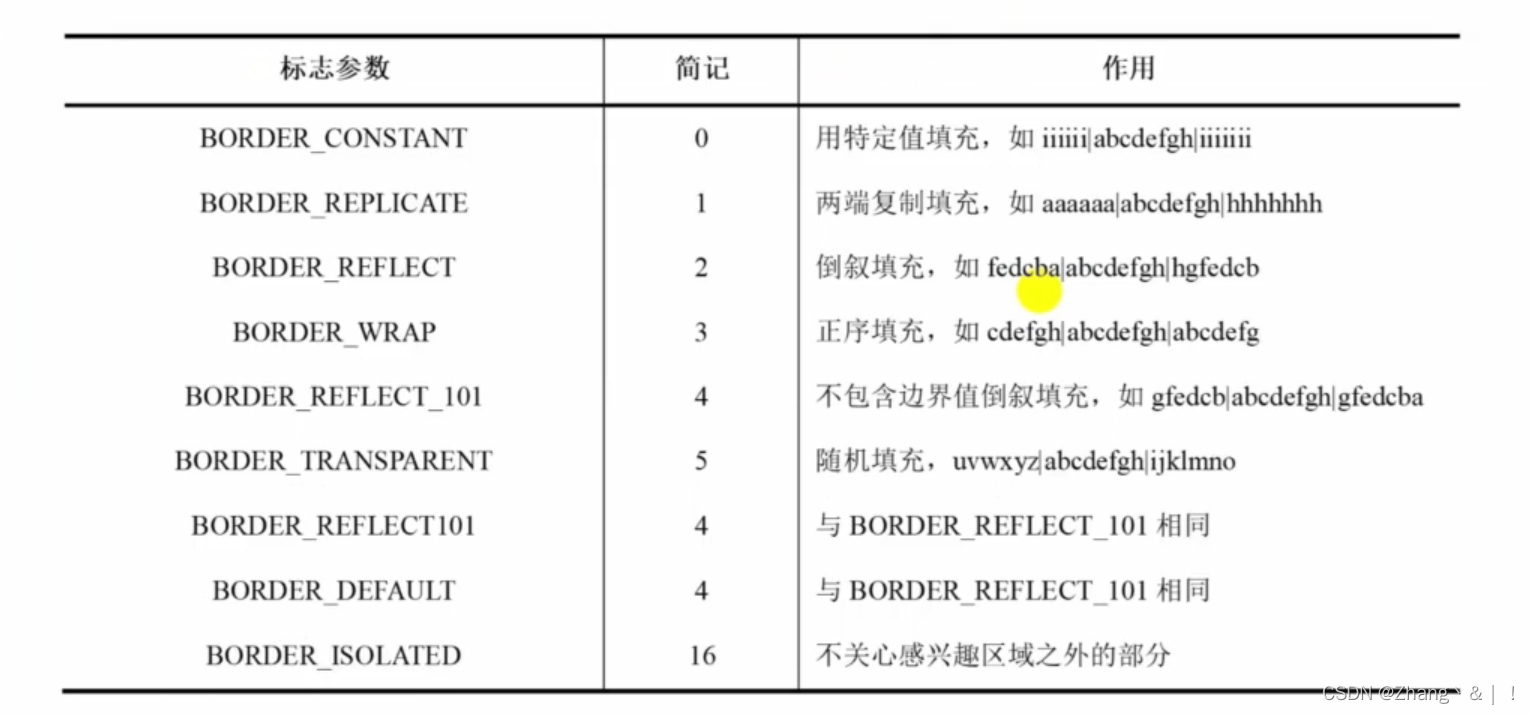
2.3 边界填充方法和对应标志
2.4 图像旋转

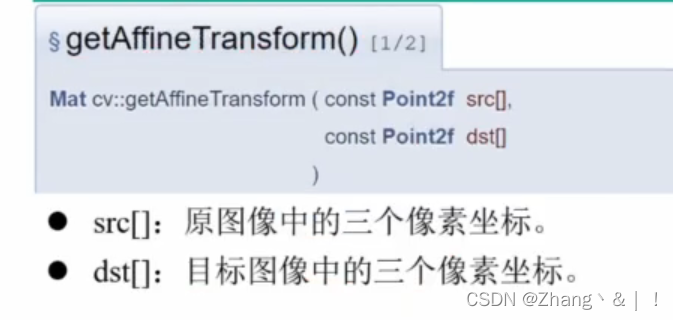
2.5 计算仿射变换矩阵
//仿射变换
int affineConversion(void)
{
Mat img = imread("F:/testMap/lena.png");
if (img.empty())
{
cout << "请确认图像文件名称是否正确" << endl;
return -1;
}
Mat rotation0, img_warp0;
double angle = 45;//设置图像旋转的角度
Size dst_size(img.rows, img.cols);//设置输出图像的尺寸
Point2f center(img.rows/2.0,img.cols/2.0);//设置图像的旋转中心
rotation0 = getRotationMatrix2D(center,angle,1);//计算仿射变换矩阵
warpAffine(img,img_warp0,rotation0,dst_size);//进行仿射变换
imshow("img_warp0", img_warp0);
//根据定义的三个点进行仿射变换
Point2f src_points[3];
Point2f dst_points[3];
src_points[0] = Point2f(0,0);//原始图像中的三个点
src_points[1] = Point2f(0,(float)(img.cols - 1));
src_points[2] = Point2f((float)(img.rows - 1),(float)(img.cols - 1));
dst_points[0] = Point2f((float)(img.rows)*0.11,(float)(img.cols)*0.20);//放射变换后图像中的三个点
dst_points[1] = Point2f((float)(img.rows)*0.15,(float)(img.cols)*0.70);
dst_points[2] = Point2f((float)(img.rows)*0.81,(float)(img.cols)*0.85);
Mat rotation1,img_warpl;
rotation1 = getAffineTransform(src_points, dst_points);//根据对应点求取仿射变换矩阵
warpAffine(img,img_warpl,rotation1,dst_size);//进行仿射变换
imshow("img_warpl", img_warpl);
waitKey(0);
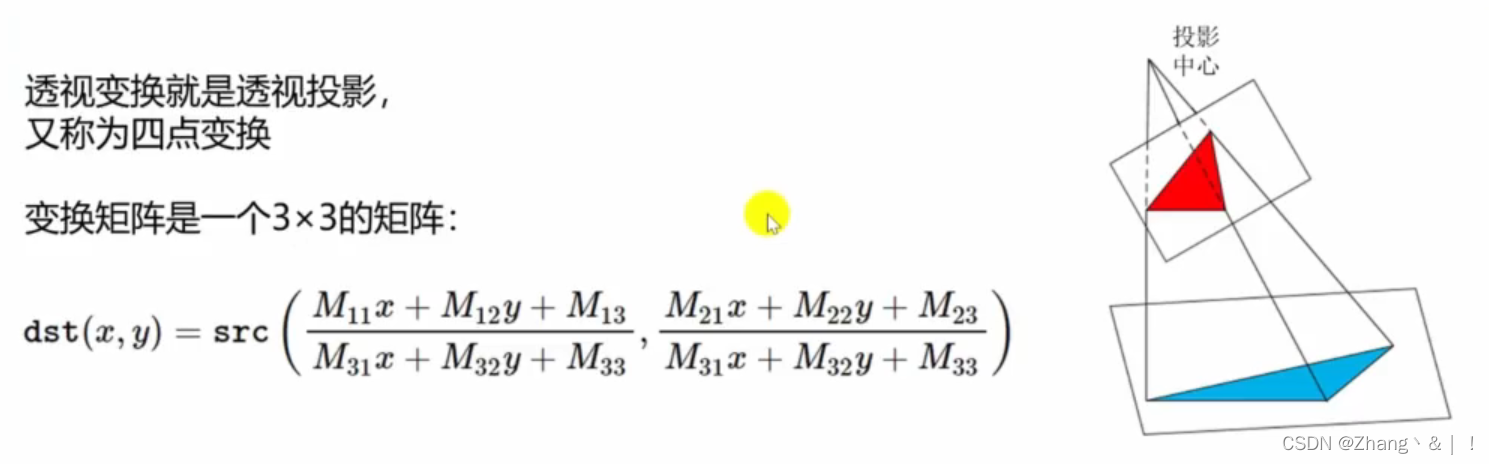
}3、透视变换
3.1 原理
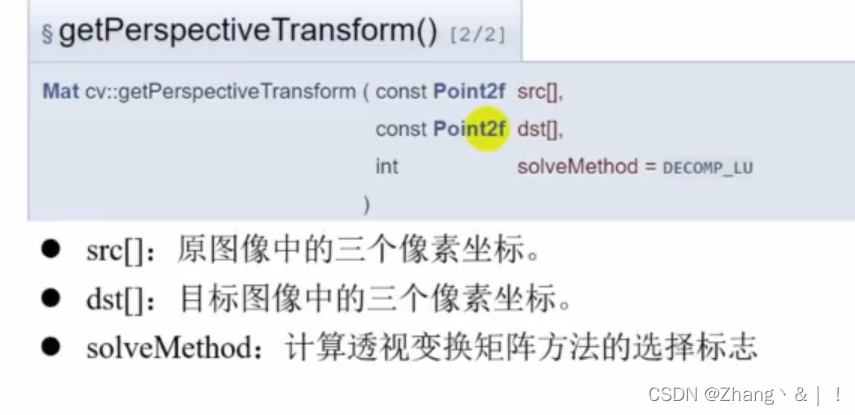
3.2 计算透视变化矩阵函数
4个像素坐标,图有误
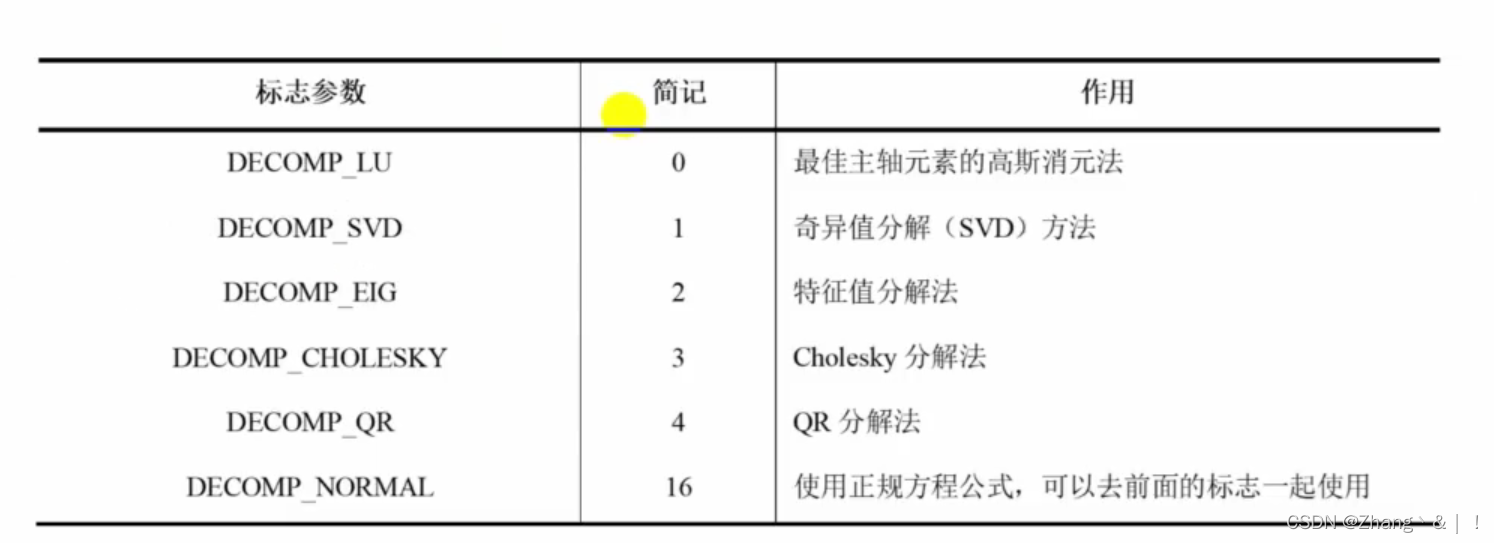
3.3 计算方法标志
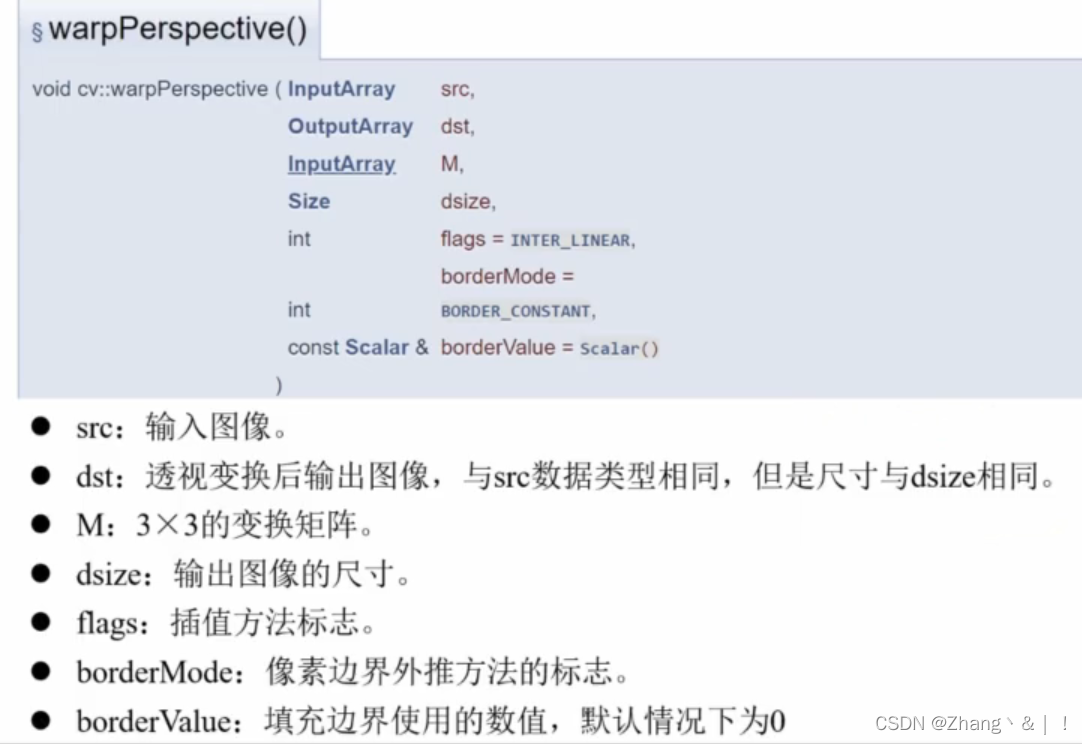
3.4 透视变换函数
//透视变换
int perspectiveConversion(void)
{
Mat img = imread("F:/testMap/二维码.png");
if (img.empty())
{
cout << "请确认图像文件名称是否正确" << endl;
return -1;
}
Point2f src_points[4];
Point2f dst_points[4];
//通过Image Watch查看的二维码四个角点坐标
src_points[0] = Point2f(100.0,401.0);
src_points[1] = Point2f(551.0,403.0);
src_points[2] = Point2f(1.0,676.0);
src_points[3] = Point2f(684.0,678.0);
//期望透视变换后二维码四个角点的坐标
dst_points[0] = Point2f(0.0,0.0);
dst_points[1] = Point2f(627.0,0.0);
dst_points[2] = Point2f(0.0, 627.0);
dst_points[3] = Point2f(627.0,627.0);
Mat rotation,img_warp;
rotation = getPerspectiveTransform(src_points,dst_points);//计算透视变换矩阵
warpPerspective(img,img_warp,rotation,img.size());//透视变换投影
imshow("img",img);
imshow("img_warp",img_warp);
waitKey(0);
}