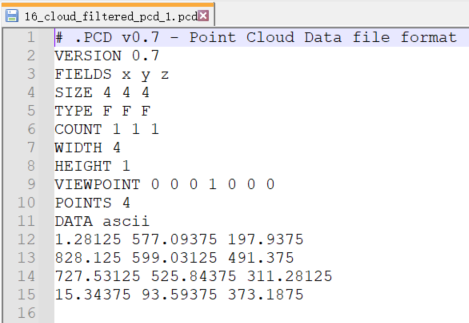
进行点云的条件滤波,滤波前后点云的个数不变,只是被滤掉的点坐标显示为nan。代码片段如下:
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond(new pcl::ConditionAnd<pcl::PointXYZ>());
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(
new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::GT, 50))); //大于50
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(
new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::LT, 500))); //小于500
// build the filter
pcl::ConditionalRemoval<pcl::PointXYZ> condrem;
condrem.setCondition(range_cond);
condrem.setInputCloud(cloud);
condrem.setKeepOrganized(true); //保持点云的组织结构不变
// apply filter
condrem.filter(*cloud_filtered); //50<z<500的保留点云文件
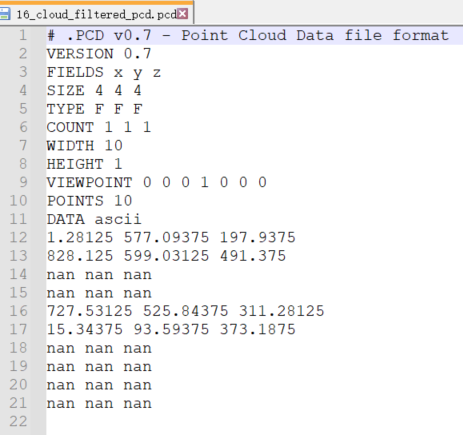
之所以会这样是因为你设置了 setKeepOrganized(true),这会保持点云的组织结构不变,包括那些被滤掉的点。当你设置 setKeepOrganized(true) 时,被滤掉的点会保留在点云中,但是它们的坐标会被设为 NaN。如果你希望移除滤掉的点并且只保留有效的点,可以将 setKeepOrganized(true) 修改为 setKeepOrganized(false) 或者删除这行代码(默认值为 false)。
修改后结果: