ROS 环境下使用velodyne激光雷达
系统版本:ubuntu 20.04
ROS版本:noetic
激光雷达型号:velodyne VLP-16
1.系统环境配置
sudo apt install ros-noetic-velodyne #安装ROS依赖
mkdir-p velodyne_ws/src #创建工作空间
cd velodyne_ws/src
git clone https://github.com/ros-drivers/velodyne.git #安装驱动
cd ..
catkin_make #编译
2.硬件连接
网线接 PC/工控机 端口
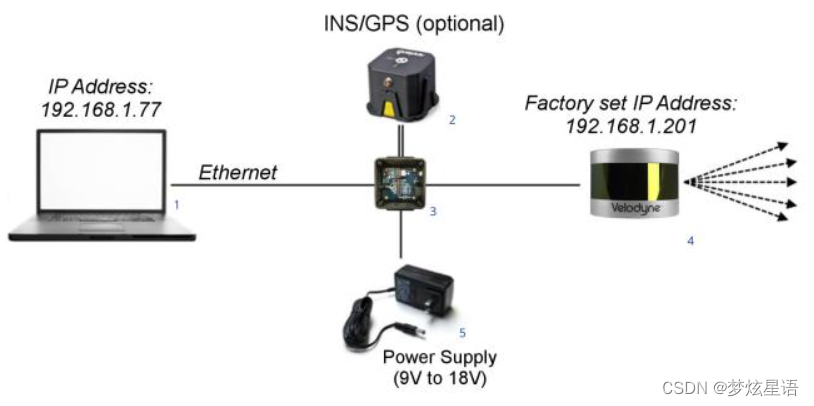
3. 网口配置
将PC/工控机的网口配置为:
ipv4,方式设置为手动
ip地址、掩码以及网关设置成下图

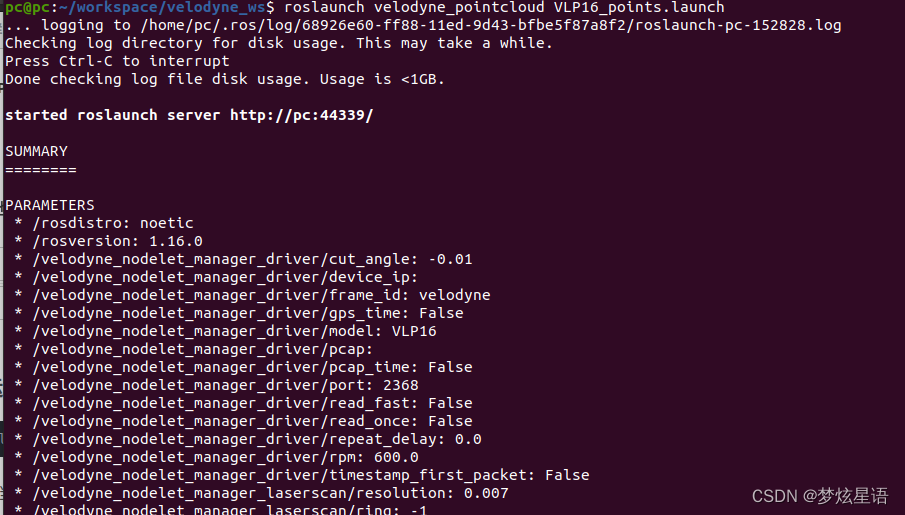
4.运行驱动程序
roslaunch velodyne_pointcloud VLP16_points.launch
查看当前话题
rostopic list
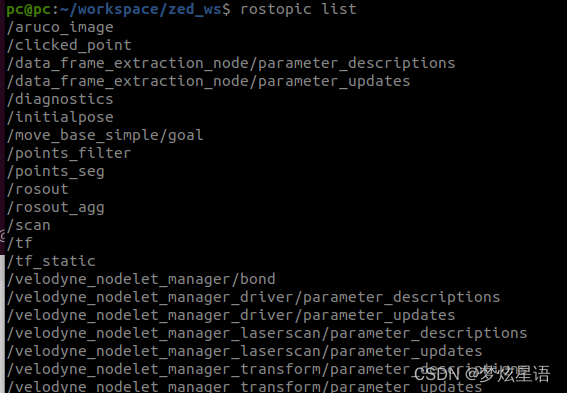
其中 /velodyne_points 就是 激光雷达发布的点云消息。
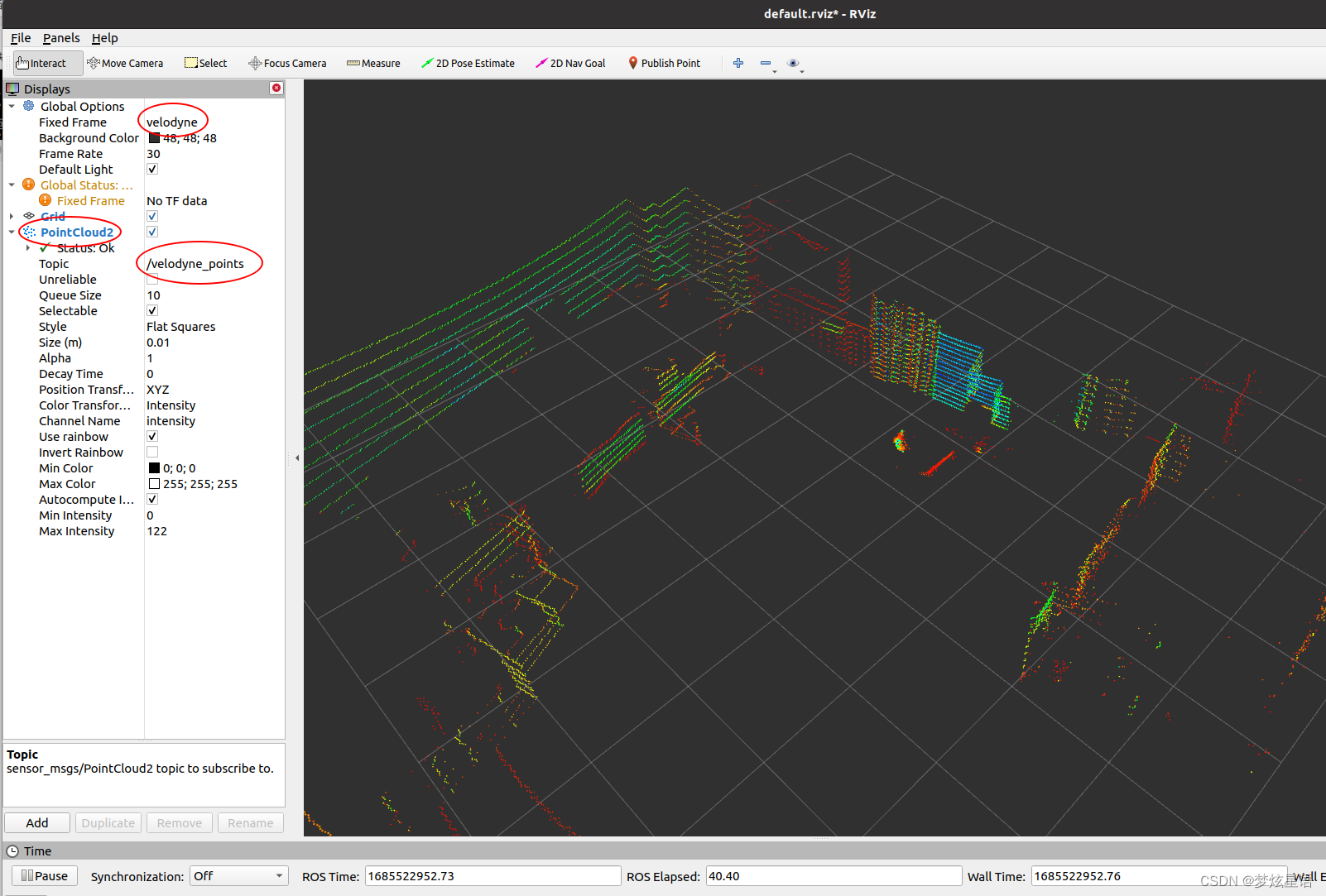
5.通过rviz可视化点云
终端输入rviz
rviz
Fiex Frame 写入 velodyne
添加 PointCloud2
Topic 选择 /velodyne_points
之后即可看到点云
参考ubuntu20.04 ROS 环境下使用velodyne激光雷达与 Flir 工业相机








![[Mysql_DB]自动写入系统时间——注意低版本数据库操作](https://img-blog.csdnimg.cn/2f01f5c5a61c4b34b0557f2c0910a986.png)