1.赛事相关信息
- 点击查看
2.赛题分析
- 软体对GPU要求较高,环境配置复杂,选择刚体环境
- 先以模仿学习/强化学习的刚体环境为基础,后期再考虑无限制刚体环境
- 部分任务(如将物块移动到指定位置),存在相机之外的额外输入:目标位置,rgbd图像难以将其作为可视化输入(超出了相机范围),所以选择点云
- 由于机械臂操作策略只关心末端执行器的运动,所以控制执行器做出动作,控制模式
pd_ee_delta_pose,动作控制的是末端执行器的每一步运动
3.演示转换
3.1.演示重现
- 使用maniskill2提供的脚本:可以交互查看不同相机拍摄的内容,赛题里面只能使用两个相机(手上相机
hand_camera、机械臂斜上方的相机base_camera),视野范围都很小,并且存在遮挡:
python tools/replay_trajectory.py --traj-path demos/rigid_body_envs/PickCube-v0/PickCube-v0.h5 --vis
3.2.控制模式转换
- 提供的演示示例需要进行控制模式的转换:使用maniskill2提供的脚本,10线程转换,
i7-7700HQ CPU,大概五分钟,五分钟之内电脑卡的别的什么都干不了:
python tools/replay_trajectory.py --traj-path demos/rigid_body_envs/PickCube-v0/PickCube-v0.h5 \
--save-traj --target-control-mode pd_ee_delta_pose --num-procs 10
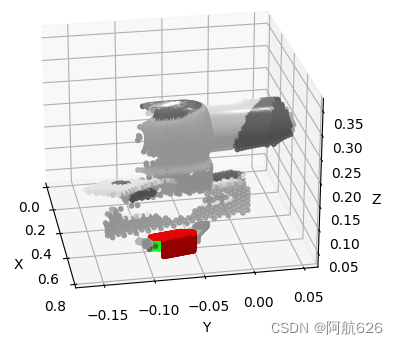
3.3.点云可视化
- 使用
matplotlib散点图可视化
import gym
import mani_skill2.envs
import numpy as np
import open3d as o3d
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
#obs_mode = pointcloud, rgbd, state_dict, state
env = gym.make("PickCube-v0", obs_mode="pointcloud", control_mode="pd_ee_delta_pose")
env.seed(0)
obs = env.reset()
done = False
fig = plt.figure()
i = 0
while not done:
action = np.array([0.1,0.1,0.1,0,0,0,1])
obs, reward, done, info = env.step(action)
point = np.array(obs['pointcloud']['xyzw'])
rgb = np.array(obs['pointcloud']['rgb'])
print(point.shape)#(32768,4)
print(rgb.shape)#(32768,3)
i += 1
if i == 10:
ax = fig.add_subplot(projection='3d')
#point_xyz = point[:,[0,1,2]]
ax.scatter(point[:,[0]], point[:,[1]], point[:,[2]], zdir="z",facecolors=rgb/255, marker="o", s=40)
#ax.scatter(xs, ys, zs=zs2, zdir="z", facecolors=rgb, marker="^", s=40)
ax.set(xlabel="X", ylabel="Y", zlabel="Z")
plt.show()
env.render() # a display is required to render
env.close()
- 效果:
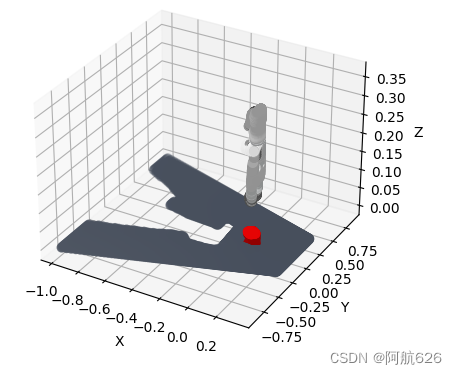
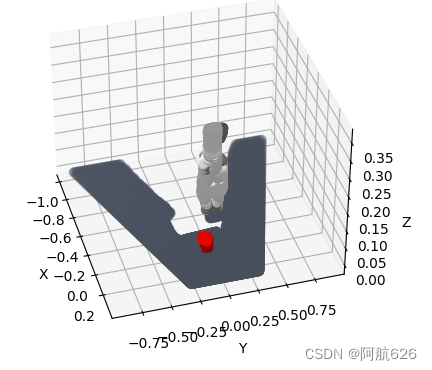
3.4.示例点云转换
- 使用maniskill2_learn脚本:
python tools/convert_state.py --env-name PickCube-v0 --num-procs 1 \
--traj-name /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.none.pd_ee_delta_pose.h5 \
--json-name /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.none.pd_ee_delta_pose.json \
--output-name /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.trajectory.none.pd_ee_delta_pose_pcd.h5 \
--control-mode pd_ee_delta_pose \
--max-num-traj 6 \
--obs-mode pointcloud \
--n-points 1200 \
--obs-frame base \
--reward-mode dense \
--n-goal-points 50 \
--obs-frame base \
--render \
- 参数解读:
--env-name:环境名字 \
--num-procs :线程数,越多转换越快,但启动多线程会比较慢,1 \
--traj-name .h5示例文件路径 \
--json-name .json示例文件路径 \
--output-name 输出的转换后的.h5文件路径 \
--control-mode :控制模式,pd_ee_delta_pose \
--max-num-traj :转换的路径个数,小一点,更快完成转换,快速验证,6 \
--obs-mode :观测方式,pointcloud \
--n-points :点云点数,1200 \
--obs-frame :观测点云基准,base \
--reward-mode:选择稠密或稀疏奖赏 dense:稠密,sparse:稀疏 \
--n-goal-points :目标位置处点云数量,50 \
--render :演示,会降低转换速度,并且只能开启一个线程\
- 点云可视化:
import h5py
import numpy as np
file = '/home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.trajectory.none.pd_ee_delta_pose_pcd.h5'
h5file = h5py.File(file, "r")
print(np.array(h5file['traj_0']))
for key in h5file['traj_0'].keys():
#print(h5file['traj_0'][key])
'''
<HDF5 dataset "dict_str_actions": shape (88, 7), type "<f4">
<HDF5 dataset "dict_str_dones": shape (88, 1), type "|b1">
<HDF5 dataset "dict_str_episode_dones": shape (88, 1), type "|b1">
<HDF5 dataset "dict_str_is_truncated": shape (88, 1), type "|b1">
<HDF5 group "/traj_0/dict_str_obs" (5 members)>
<HDF5 dataset "dict_str_rewards": shape (88, 1), type "<f4">
<HDF5 dataset "dict_str_worker_indices": shape (88, 1), type "<i4">
'''
#print( np.array( h5file['traj_0'][key] ) )
pass
'''
for key in h5file['traj_0']['dict_str_obs']:
print(h5file['traj_0']['dict_str_obs'][key])
print( np.array( h5file['traj_0']['dict_str_obs'][key] ) )
'''
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
point = np.array( h5file['traj_0']['dict_str_obs']['dict_str_xyz'] )
rgb = np.array( h5file['traj_0']['dict_str_obs']['dict_str_rgb'] )
i = 80#查看第i帧
ax.scatter(point[[i],:,[0]], point[[i],:,[1]], point[[i],:,[2]], zdir="z",facecolors=np.squeeze(rgb[[i],:],0), marker=".", s=40)
ax.set(xlabel="X", ylabel="Y", zlabel="Z")
plt.show()
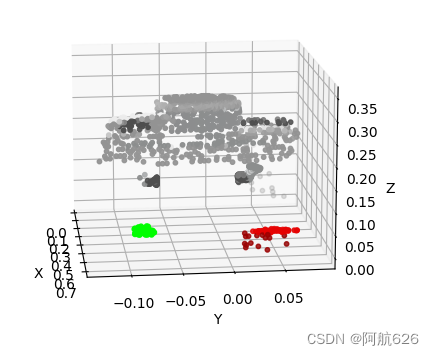
效果:
i = 0
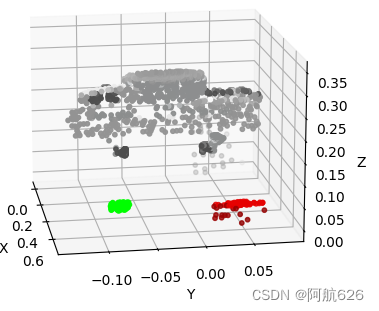
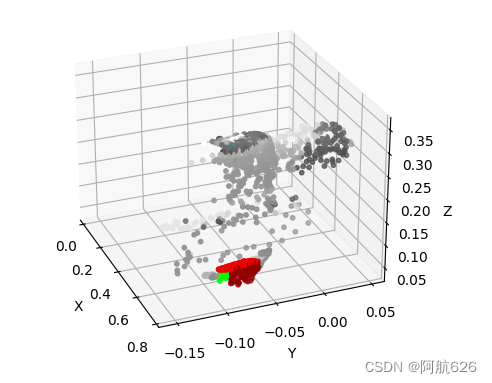
i = 10
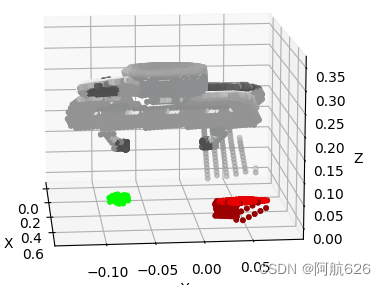
i = 80
- 调整参数,重新转换(需要删除上一步输出的文件,或更改输出的文件名):
python tools/convert_state.py --env-name PickCube-v0 --num-procs 1 \
--traj-name /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.none.pd_ee_delta_pose.h5 \
--json-name /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.none.pd_ee_delta_pose.json \
--output-name /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.trajectory.none.pd_ee_delta_pose_pcd.h5 \
--control-mode pd_ee_delta_pose \
--max-num-traj 2 \
--obs-mode pointcloud \
--n-points 10000 \
--obs-frame world \
--reward-mode dense \
--n-goal-points 50 \
--render \
- 输出:
Obs mode: pointcloud; Control mode: pd_ee_delta_pose
Obs frame: world; n_points: 10000; n_goal_points: 50
Reset kwargs for the current trajectory: {'seed': 0}
Convert Trajectory: completed 1 / 2; this trajectory has length 88
Reset kwargs for the current trajectory: {'seed': 1}
Convert Trajectory: completed 2 / 2; this trajectory has length 101
Finish using /tmp/0.h5
maniskill2_learn - (record_utils.py:280) - INFO - 2022-12-02,16:31:19 - Total number of trajectories 2
Finish merging files to /home/jiangyvhang/ManiSkill2/demos/rigid_body_envs/PickCube-v0/PickCube-v0.trajectory.none.pd_ee_delta_pose_pcd.h5
- 效果:
i = 0
i = 10
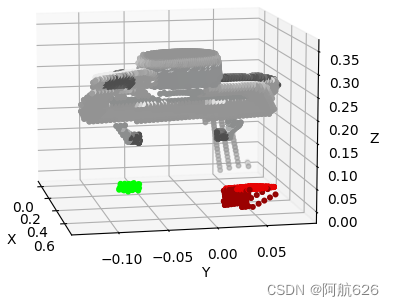
i = 80






![[附源码]计算机毕业设计springboot新能源汽车租赁](https://img-blog.csdnimg.cn/dda64d9657be4f0798ae2fedf5db3664.png)