🍒🍒🍒欢迎关注🌈🌈🌈
📝个人主页:我爱Matlab
👍点赞➕评论➕收藏 == 养成习惯(一键三连)🌻🌻🌻🍌希望大家多多支持🍓~一起加油 🤗
💬语录:将来的我一定会感谢现在奋斗的自己!
🍁🥬🕒摘要🕒🥬🍁
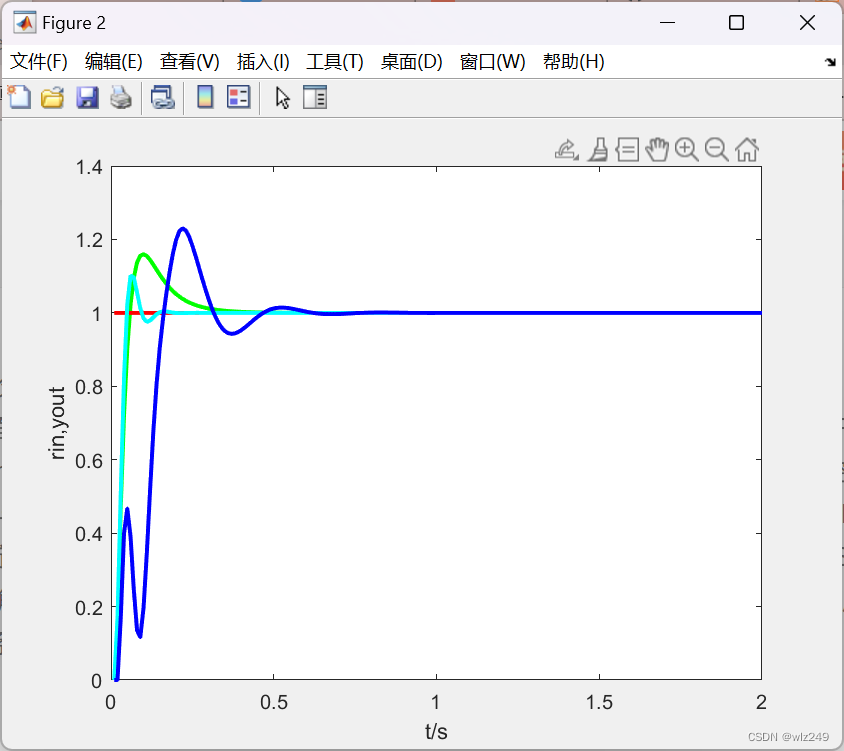
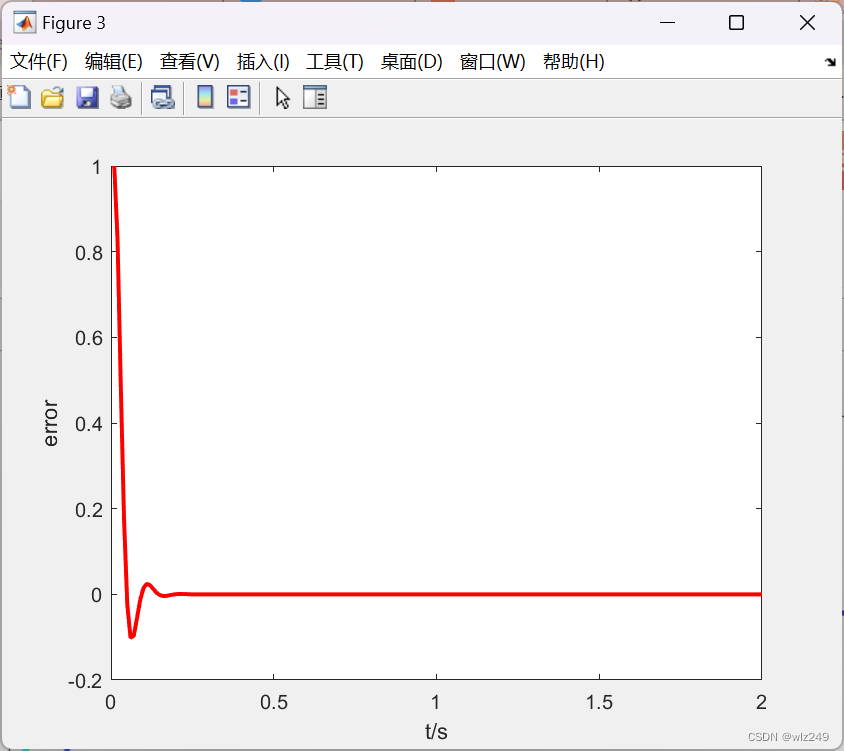
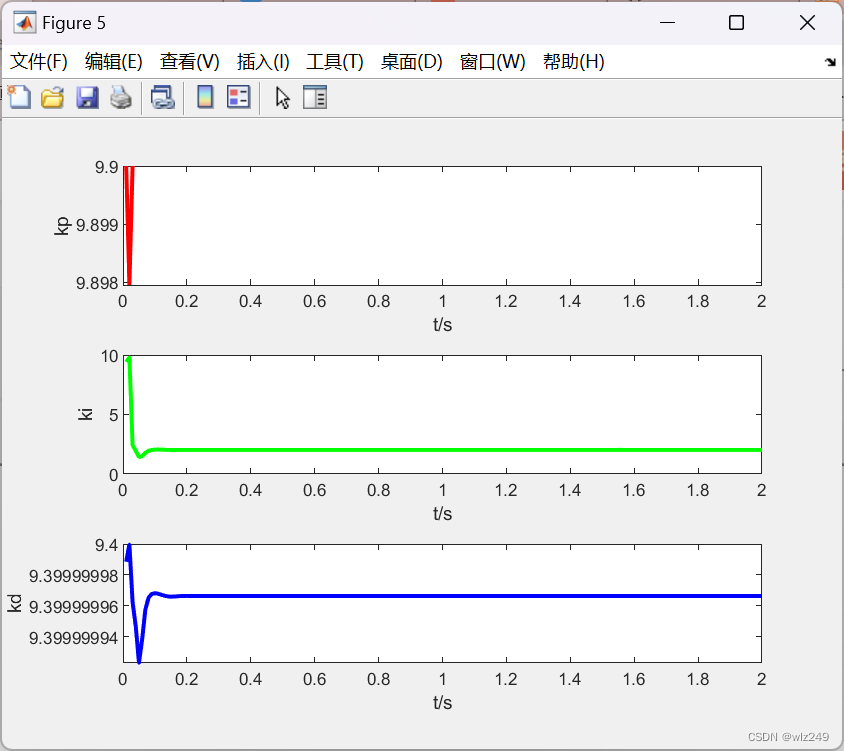
传统比例-积分-微分(Proportion Integral Derivative,PID)控制器存在参数整定困难,不能在线实时调整以及面对复杂非线性系统时应用效果不佳等问题,提出一种基于粒子群算法(Particle Swarm Optimization,PSO)优化的反向传播(Back Propagation,BP)神经网络PID控制方法。将BP神经网络与PID控制器相结合,利用BP神经网络的自适应学习能力在线实时调整PID控制参数,提升系统稳定性,针对BP-PID自学习过程中容易陷入局部极小值问题,利用改进的PSO算法对其进行优化,确保BP-PID系统收敛于全局最优解。基于仿真数据开展实验,结果表明,所提方法能够有效提升系统的控制精度和控制稳定度。
✨🔎⚡运行结果⚡🔎✨

💂♨️👨🎓Matlab代码👨🎓♨️💂
clear all;
close all;
xite=0.50;
alfa=0.05;
IN=4; H=5; Out=3;
ts=0.01;
% wi=0.50*rands(H,IN);
% wo=0.50*rands(Out,H);
%结合粒子群数值优化算法的神经网络权重初始化矩阵
wi=[
-4.7730 5.0000 4.8238 -4.7085
4.9337 4.8659 -4.9651 -4.8618
4.9470 4.9485 -4.6965 4.8327
5.0000 4.9508 4.5696 4.9154
4.6047 -4.7804 5.0000 -4.7332
];
wo=[
4.9438 -4.6610 4.9293 4.7416 -4.9323
5.0000 4.9414 4.0693 -4.7460 5.0000
-4.9147 4.8119 4.9292 4.9434 4.9398
];
%[wi , wo]=SPO_InitW();
wi_init_save=wi; wo_init_save=wo;
wo_1=wo; wo_2=wo;
wi_1=wi; wi_2=wi;
%M=[10,1,10];
%激活函数系数
M=[9.9,9.8,9.4];
x=[0,0,0];
du_1=0;
u_1=0; u_2=0; u_3=0; u_4=0; u_5=0;u_6=0;u_7=0;
y_1=0; y_2=0; y_3=0;
error_1=0; error_2=0;
Oh=zeros(H,1);
I=Oh;
sys=tf(400,[1,50,0]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
for k=1:1:200
time(k)=k*ts;
rin(k)=1.0;
yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;
error(k)=rin(k)-yout(k);
X(1)=error(k)-error_1;
X(2)=error(k);
X(3)=error(k)-2*error_1+error_2;
xii=[X(1),X(2),X(3),1];
xi=xii/norm(xii);
epid=[X(1);X(2);X(3)];
%%%前向传播----------------------------------------
net2=xi*(wi');
for j=1:1:H
Oh(j)=( exp( net2(j)-exp(-net2(j)) ) )/(exp( net2(j)+exp(-net2(j)) ));
end
📜📢🌈参考文献🌈📢📜
[1]曾雄飞.基于粒子群算法优化BP神经网络的PID控制算法[J].电子设计工程,2022,30(11):69-73+78.DOI:10.14022/j.issn1674-6236.2022.11.015.