学习算法
HMM的学习,在有观测序列的情况下,根据训练数据是否包含状态序列,可以分别由监督学习算法和无监督学习算法实现。
监督学习算法
监督学习算法就比较简单,基于已有的数据利用极大似然估计法来估计隐马尔可夫模型的参数。分为以下几步:
1.转移概率 a i j a_{ij} aij的估计
设样本中时刻
t
t
t处于状态
i
i
i,时刻
t
+
1
t+1
t+1转到到状态
j
j
j的频数为
A
i
j
A_{ij}
Aij,那么状态转移概率
a
i
j
a_{ij}
aij的估计是
a
^
i
j
=
A
i
j
∑
j
N
A
i
j
,
i
=
1
,
2
,
⋯
,
N
;
j
=
1
,
2
,
⋯
,
N
(10.30)
\hat a_{ij} = \frac{A_{ij}}{\sum_j^N A_{ij}},\quad i=1,2,\cdots,N; \quad j=1,2,\cdots,N \tag{10.30}
a^ij=∑jNAijAij,i=1,2,⋯,N;j=1,2,⋯,N(10.30)
2.观测概率
b
j
(
k
)
b_j(k)
bj(k)的估计
设样本中状态为
j
j
j并观测为
k
k
k的频数是
B
j
k
B_{jk}
Bjk,那么状态为
j
j
j观测为
k
k
k的概率
b
j
(
k
)
b_j(k)
bj(k)的估计是
b
^
j
(
k
)
=
B
j
k
∑
k
=
1
M
B
j
k
,
j
=
1
,
2
,
⋯
,
N
;
k
=
1
,
2
,
⋯
,
M
(10.31)
\hat b_j(k) = \frac{B_{jk}}{\sum_{k=1}^M B_{jk}}, \quad j=1,2,\cdots,N; \quad k=1,2,\cdots, M \tag{10.31}
b^j(k)=∑k=1MBjkBjk,j=1,2,⋯,N;k=1,2,⋯,M(10.31)
3.初始状态概率
π
i
\pi_i
πi的估计
π
^
i
\hat \pi_i
π^i为
S
S
S个样本中初始状态为
q
i
q_i
qi的频率
一般没有这么多标注的训练数据,因此通常采用的是无监督学习方法,下面介绍一种。
Baum-Welch算法
假设给定训练数据只包含
S
S
S个长度为
T
T
T的观测序列
{
O
1
,
⋯
,
O
S
}
\{O_1,\cdots,O_S\}
{O1,⋯,OS}而没有对应的状态序列,目标是学习隐马尔可夫模型
λ
=
(
A
,
B
,
π
)
\lambda=(A,B,\pi)
λ=(A,B,π)的参数。我们将观测序列数据看作观测数据
O
O
O,状态序列数据看作不可观测的隐数据
I
I
I,那么隐马尔可夫模型事实上是一个含有隐变量的概率模型
P
(
O
∣
λ
)
=
∑
I
P
(
O
,
I
∣
λ
)
=
∑
I
P
(
O
∣
I
,
λ
)
P
(
I
∣
λ
)
(10.32)
P(O|\lambda) =\sum_I P(O,I|\lambda) = \sum_I P(O|I,\lambda) P(I|\lambda) \tag{10.32}
P(O∣λ)=I∑P(O,I∣λ)=I∑P(O∣I,λ)P(I∣λ)(10.32)
它的参数学习可以由EM算法实现。
1.确定完全数据的对数似然函数
所有观测数据写成 O = ( o 1 , ⋯ , o T ) O=(o_1,\cdots,o_T) O=(o1,⋯,oT),所有隐数据写成 I = ( i 1 , ⋯ , i T ) I=(i_1,\cdots,i_T) I=(i1,⋯,iT),完全数据是 ( O , I ) = ( o 1 , o 2 , ⋯ , o T , i 1 , i 2 , ⋯ , i T ) (O,I)=(o_1,o_2,\cdots,o_T,i_1,i_2,\cdots,i_T) (O,I)=(o1,o2,⋯,oT,i1,i2,⋯,iT)。完全数据的对数似然函数是 log P ( O , I ∣ λ ) \log P(O,I|\lambda) logP(O,I∣λ)。
2.EM算法的E步:求 Q Q Q函数 Q ( λ , λ ˉ ) Q(\lambda,\bar \lambda) Q(λ,λˉ)
按照
Q
Q
Q函数的定义,
Q
(
λ
,
λ
ˉ
)
=
E
I
[
log
P
(
O
,
I
∣
λ
)
∣
O
,
λ
ˉ
]
=
∑
I
log
P
(
O
,
I
∣
λ
)
P
(
I
∣
O
,
λ
ˉ
)
=
∑
I
log
P
(
O
,
I
∣
λ
)
P
(
O
,
I
∣
λ
ˉ
)
P
(
O
∣
λ
ˉ
)
=
1
P
(
O
∣
λ
ˉ
)
∑
I
log
P
(
O
,
I
∣
λ
)
P
(
O
,
I
∣
λ
ˉ
)
与
I
无
关
可
以
提
出
去
\begin{aligned} Q(\lambda,\bar \lambda) &= E_I[\log P(O,I|\lambda)|O,\bar \lambda] \\ &= \sum_I \log P(O,I|\lambda)P(I|O,\bar \lambda) \\ &= \sum_I \log P(O,I|\lambda)\frac{P(O,I|\bar \lambda)}{P(O|\bar \lambda)} \\ &= \frac{1}{P(O|\bar \lambda)}\sum_I \log P(O,I|\lambda)P(O,I|\bar \lambda) & 与I无关可以提出去\\ \end{aligned}
Q(λ,λˉ)=EI[logP(O,I∣λ)∣O,λˉ]=I∑logP(O,I∣λ)P(I∣O,λˉ)=I∑logP(O,I∣λ)P(O∣λˉ)P(O,I∣λˉ)=P(O∣λˉ)1I∑logP(O,I∣λ)P(O,I∣λˉ)与I无关可以提出去
其中
λ
ˉ
\bar \lambda
λˉ是隐马尔可夫模型参数的当前估计值,
λ
\lambda
λ是要极大化的隐马尔可夫模型参数。
λ
ˉ
\bar \lambda
λˉ是一个常量,上式中
P
(
O
∣
λ
ˉ
)
P(O|\bar \lambda)
P(O∣λˉ)对于
λ
\lambda
λ而言是一个常数项,省去该项就得到了:
Q
(
λ
,
λ
ˉ
)
=
∑
I
log
P
(
O
,
I
∣
λ
)
P
(
O
,
I
∣
λ
ˉ
)
(10.33)
Q(\lambda,\bar \lambda) =\sum_I \log P(O,I|\lambda)P(O,I|\bar \lambda) \tag{10.33}
Q(λ,λˉ)=I∑logP(O,I∣λ)P(O,I∣λˉ)(10.33)
而根据式
(
10.12
)
(10.12)
(10.12):
P
(
O
,
I
∣
λ
)
=
π
i
1
b
i
1
(
o
1
)
a
i
1
,
i
2
b
i
2
(
o
2
)
⋯
a
i
T
−
1
,
i
T
b
i
T
(
o
T
)
P(O,I|\lambda) = \pi_{i_1} b_{i_1}(o_1)a_{i_1,i_2}b_{i_2}(o_2)\cdots a_{i_{T-1},i_T}b_{i_T}(o_T)
P(O,I∣λ)=πi1bi1(o1)ai1,i2bi2(o2)⋯aiT−1,iTbiT(oT)
我们要求的就是
π
,
A
,
B
\pi,A,B
π,A,B,因此对上式按这三个参数分开。
于是函数 Q ( λ , λ ˉ ) Q(\lambda, \bar \lambda) Q(λ,λˉ)可以写成:
Q
(
λ
,
λ
ˉ
)
=
∑
I
log
P
(
O
,
I
∣
λ
)
P
(
O
,
I
∣
λ
ˉ
)
=
∑
I
log
[
π
i
1
b
i
1
(
o
1
)
a
i
1
,
i
2
b
i
2
(
o
2
)
⋯
a
i
T
−
1
,
i
T
b
i
T
(
o
T
)
]
P
(
O
,
I
∣
λ
ˉ
)
=
∑
I
[
log
(
π
i
1
)
+
log
(
a
i
1
,
i
2
a
i
2
,
i
3
a
i
T
−
1
,
i
T
)
+
log
(
b
i
1
(
o
1
)
b
i
2
(
o
2
)
⋯
b
i
T
(
o
T
)
]
P
(
O
,
I
∣
λ
ˉ
)
根
据
三
个
参
数
分
开
=
∑
I
log
(
π
i
1
)
P
(
O
,
I
∣
λ
ˉ
)
+
∑
I
(
∑
t
=
1
T
−
1
log
a
i
t
,
i
t
+
1
)
P
(
O
,
I
∣
λ
ˉ
)
+
∑
I
(
∑
t
=
1
T
b
i
t
(
o
t
)
)
P
(
O
,
I
∣
λ
ˉ
)
(10.34)
\begin{aligned} Q(\lambda,\bar \lambda) &= \sum_I \log P(O,I|\lambda)P(O,I|\bar \lambda) \\ &= \sum_I \log [ \pi_{i_1} b_{i_1}(o_1)a_{i_1,i_2}b_{i_2}(o_2)\cdots a_{i_{T-1},i_T}b_{i_T}(o_T)]P(O,I|\bar \lambda) \\ &= \sum_I [\log(\pi_{i_1}) + \log(a_{i_1,i_2}a_{i_2,i_3}a_{i_{T-1},i_T}) + \log(b_{i_1}(o_1)b_{i_2}(o_2)\cdots b_{i_T}(o_T) ] P(O,I|\bar \lambda) & 根据三个参数分开\\ &=\sum_I \log (\pi_{i_1}) P(O,I|\bar \lambda) + \sum_I \left( \sum_{t=1}^{T-1} \log a_{i_t,i_{t+1}} \right) P(O,I|\bar \lambda) + \sum_I \left( \sum_{t=1}^{T} b_{i_t}(o_t) \right) P(O,I|\bar \lambda) \end{aligned}\tag{10.34}
Q(λ,λˉ)=I∑logP(O,I∣λ)P(O,I∣λˉ)=I∑log[πi1bi1(o1)ai1,i2bi2(o2)⋯aiT−1,iTbiT(oT)]P(O,I∣λˉ)=I∑[log(πi1)+log(ai1,i2ai2,i3aiT−1,iT)+log(bi1(o1)bi2(o2)⋯biT(oT)]P(O,I∣λˉ)=I∑log(πi1)P(O,I∣λˉ)+I∑(t=1∑T−1logait,it+1)P(O,I∣λˉ)+I∑(t=1∑Tbit(ot))P(O,I∣λˉ)根据三个参数分开(10.34)
3.EM算法的M步: 极大化
Q
Q
Q函数
Q
(
λ
,
λ
ˉ
)
Q(\lambda,\bar \lambda)
Q(λ,λˉ) 求模型参数
A
,
B
,
π
A,B,\pi
A,B,π
我们上一步已经把要极大化的参数单独地分开成三个项,所以只需要对各项分别极大化。
(1)式
(
10.34
)
(10.34)
(10.34)第1项可以写成:
∑
I
log
(
π
i
1
)
P
(
O
,
I
∣
λ
ˉ
)
=
∑
i
=
1
N
log
(
π
i
)
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
\sum_I \log (\pi_{i_1}) P(O,I|\bar \lambda) = \sum_{i=1}^N \log (\pi_{i}) P(O,i_1=i|\bar \lambda)
I∑log(πi1)P(O,I∣λˉ)=i=1∑Nlog(πi)P(O,i1=i∣λˉ)
π
i
\pi_i
πi满足约束条件
∑
i
=
1
N
π
i
=
1
\sum_{i=1}^N \pi_i =1
∑i=1Nπi=1,利用拉格朗日乘子法,可以写出拉格朗日函数:
∑
i
=
1
N
log
(
π
i
)
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
+
γ
(
∑
i
=
1
N
π
i
−
1
)
\sum_{i=1}^N \log (\pi_{i}) P(O,i_1=i|\bar \lambda) + \gamma \left(\sum_{i=1}^N \pi_i -1 \right)
i=1∑Nlog(πi)P(O,i1=i∣λˉ)+γ(i=1∑Nπi−1)
上式对
π
i
\pi_i
πi求偏导并令结果为0:
∂
∂
π
i
[
∑
i
=
1
N
log
(
π
i
)
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
+
γ
(
∑
i
=
1
N
π
i
−
1
)
]
=
0
(10.35)
\frac{\partial}{\partial \pi_i} \left[ \sum_{i=1}^N \log (\pi_{i}) P(O,i_1=i|\bar \lambda) + \gamma \left(\sum_{i=1}^N \pi_i -1 \right) \right] = 0 \tag{10.35}
∂πi∂[i=1∑Nlog(πi)P(O,i1=i∣λˉ)+γ(i=1∑Nπi−1)]=0(10.35)
得
1
π
i
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
+
γ
=
0
⇒
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
+
π
i
γ
=
0
\frac{1}{\pi_i} P(O,i_1=i|\bar \lambda) + \gamma = 0 \Rightarrow P(O,i_1=i|\bar \lambda) + \pi_i\gamma = 0
πi1P(O,i1=i∣λˉ)+γ=0⇒P(O,i1=i∣λˉ)+πiγ=0
对
i
i
i求和得到
γ
\gamma
γ:
π
i
γ
=
−
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
∑
i
π
i
γ
=
∑
i
−
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
γ
=
−
P
(
O
∣
λ
ˉ
)
\begin{aligned} \pi_i\gamma &= -P(O,i_1=i|\bar \lambda) \\ \sum_i \pi_i\gamma &= \sum_i -P(O,i_1=i|\bar \lambda) \\ \gamma &= -P(O|\bar \lambda) \end{aligned}
πiγi∑πiγγ=−P(O,i1=i∣λˉ)=i∑−P(O,i1=i∣λˉ)=−P(O∣λˉ)
代入式
(
10.35
)
(10.35)
(10.35)得
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
+
π
i
γ
=
0
π
i
=
−
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
γ
π
i
=
P
(
O
,
i
1
=
i
∣
λ
ˉ
)
P
(
O
∣
λ
ˉ
)
(10.36)
\begin{aligned} P&(O,i_1=i|\bar \lambda) + \pi_i\gamma = 0 \\ \pi_i &= -\frac{P(O,i_1=i|\bar \lambda) }{\gamma} \\ \pi_i &= \frac{P(O,i_1=i|\bar \lambda) }{P(O|\bar \lambda)} \end{aligned} \tag{10.36}
Pπiπi(O,i1=i∣λˉ)+πiγ=0=−γP(O,i1=i∣λˉ)=P(O∣λˉ)P(O,i1=i∣λˉ)(10.36)
(2) 式
(
10.34
)
(10.34)
(10.34)的第2项可以写成
∑
I
(
∑
t
=
1
T
−
1
log
a
i
t
,
i
t
+
1
)
P
(
O
,
I
∣
λ
ˉ
)
=
∑
i
=
1
N
∑
j
=
1
N
∑
t
=
1
T
−
1
log
a
i
j
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
\sum_I \left( \sum_{t=1}^{T-1} \log a_{i_t,i_{t+1}} \right) P(O,I|\bar \lambda) = \sum_{i=1}^{N} \sum_{j=1}^{N} \sum_{t=1}^{T-1} \log a_{ij} P(O,i_t=i,i_{t+1}=j|\bar \lambda)
I∑(t=1∑T−1logait,it+1)P(O,I∣λˉ)=i=1∑Nj=1∑Nt=1∑T−1logaijP(O,it=i,it+1=j∣λˉ)
a
i
j
a_{ij}
aij满足约束条件
∑
j
=
1
N
a
i
j
=
1
\sum_{j=1}^N a_{ij} =1
∑j=1Naij=1,利用拉格朗日乘子法,可以写出拉格朗日函数:
∑
i
=
1
N
∑
j
=
1
N
∑
t
=
1
T
−
1
log
a
i
j
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
+
γ
(
∑
i
=
1
N
a
i
j
−
1
)
\sum_{i=1}^{N} \sum_{j=1}^{N} \sum_{t=1}^{T-1} \log a_{ij} P(O,i_t=i,i_{t+1}=j|\bar \lambda)+ \gamma \left(\sum_{i=1}^N a_{ij} -1 \right)
i=1∑Nj=1∑Nt=1∑T−1logaijP(O,it=i,it+1=j∣λˉ)+γ(i=1∑Naij−1)
上式对
a
i
j
a_{ij}
aij求偏导并令结果为0得:
1
a
i
j
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
+
γ
=
0
a
i
j
γ
=
−
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
\frac{1}{a_{ij}} \sum_{t=1}^{T-1} P(O,i_t=i,i_{t+1}=j|\bar \lambda) +\gamma = 0 \\ a_{ij}\gamma = - \sum_{t=1}^{T-1} P(O,i_t=i,i_{t+1}=j|\bar \lambda)
aij1t=1∑T−1P(O,it=i,it+1=j∣λˉ)+γ=0aijγ=−t=1∑T−1P(O,it=i,it+1=j∣λˉ)
两边对
j
j
j求和:
∑
j
a
i
j
γ
=
−
∑
j
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
γ
=
−
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
∣
λ
ˉ
)
\sum_j a_{ij} \gamma = -\sum_j \sum_{t=1}^{T-1} P(O,i_t=i,i_{t+1}=j|\bar \lambda) \\ \gamma = - \sum_{t=1}^{T-1} P(O,i_t=i|\bar \lambda)
j∑aijγ=−j∑t=1∑T−1P(O,it=i,it+1=j∣λˉ)γ=−t=1∑T−1P(O,it=i∣λˉ)
代入得
a
i
j
=
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
∣
λ
ˉ
)
(10.37)
a_{ij} = \frac{ \sum_{t=1}^{T-1} P(O,i_t=i,i_{t+1}=j|\bar \lambda)}{\sum_{t=1}^{T-1} P(O,i_t=i|\bar \lambda)} \tag{10.37}
aij=∑t=1T−1P(O,it=i∣λˉ)∑t=1T−1P(O,it=i,it+1=j∣λˉ)(10.37)
(3) 式
(
10.34
)
(10.34)
(10.34)的第3项为
∑
I
(
∑
t
=
1
T
b
i
t
(
o
t
)
)
P
(
O
,
I
∣
λ
ˉ
)
=
∑
j
=
1
N
∑
t
=
1
T
log
b
j
(
o
t
)
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
\sum_I \left( \sum_{t=1}^{T} b_{i_t}(o_t) \right) P(O,I|\bar \lambda) = \sum_{j=1}^N \sum_{t=1}^T \log b_j(o_t) P(O,i_t=j|\bar \lambda)
I∑(t=1∑Tbit(ot))P(O,I∣λˉ)=j=1∑Nt=1∑Tlogbj(ot)P(O,it=j∣λˉ)
约束条件是
∑
k
=
1
M
b
j
(
k
)
=
1
\sum_{k=1}^M b_j(k)=1
∑k=1Mbj(k)=1,回顾一下,有
M
M
M个观测变量;
b
j
(
k
)
b_j(k)
bj(k)表示状态为
q
j
q_j
qj的情况下观测为
v
k
v_k
vk的概率。
注意,只有在 o t = v k o_t=v_k ot=vk时 b j ( o t ) b_j(o_t) bj(ot)对 b j ( k ) b_j(k) bj(k)的偏导数才不为0,以 I ( o t = v k ) I(o_t=v_k) I(ot=vk)表示。
利用拉格朗日乘子法,写出拉格朗日函数:
∑
j
=
1
N
∑
t
=
1
T
log
b
j
(
o
t
)
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
+
γ
(
∑
k
=
1
M
b
j
(
k
)
−
1
)
\sum_{j=1}^N \sum_{t=1}^T \log b_j(o_t) P(O,i_t=j|\bar \lambda) + \gamma \left(\sum_{k=1}^M b_j(k) -1 \right)
j=1∑Nt=1∑Tlogbj(ot)P(O,it=j∣λˉ)+γ(k=1∑Mbj(k)−1)
上式对
b
j
(
k
)
b_j(k)
bj(k)求偏导并令结果为0得:
1
b
j
(
k
)
∑
t
=
1
T
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
I
(
o
t
=
v
k
)
+
γ
=
0
b
j
(
k
)
γ
=
−
∑
t
=
1
T
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
I
(
o
t
=
v
k
)
\frac{1}{b_j(k)} \sum_{t=1}^T P(O,i_t=j|\bar \lambda) I(o_t=v_k) + \gamma = 0 \\ b_j(k) \gamma = -\sum_{t=1}^T P(O,i_t=j|\bar \lambda) I(o_t=v_k)
bj(k)1t=1∑TP(O,it=j∣λˉ)I(ot=vk)+γ=0bj(k)γ=−t=1∑TP(O,it=j∣λˉ)I(ot=vk)
两边对
k
k
k求和,注意右边本来通过指示函数
I
(
o
t
=
v
k
)
I(o_t=v_k)
I(ot=vk)限制
o
t
=
v
k
o_t=v_k
ot=vk,对
k
k
k求和的话,相当于整个指示函数没了。
γ
=
−
∑
t
=
1
T
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
\gamma =-\sum_{t=1}^T P(O,i_t=j|\bar \lambda)
γ=−t=1∑TP(O,it=j∣λˉ)
代入得
b
j
(
k
)
=
∑
t
=
1
T
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
I
(
o
t
=
v
k
)
∑
t
=
1
T
P
(
O
,
i
t
=
j
∣
λ
ˉ
)
(10.38)
b_j(k) = \frac{\sum_{t=1}^T P(O,i_t=j|\bar \lambda) I(o_t=v_k)}{\sum_{t=1}^T P(O,i_t=j|\bar \lambda)} \tag{10.38}
bj(k)=∑t=1TP(O,it=j∣λˉ)∑t=1TP(O,it=j∣λˉ)I(ot=vk)(10.38)
Baum-Welch模型参数估计公式
将式
(
10.36
)
(10.36)
(10.36)~式
(
10.38
)
(10.38)
(10.38)中的各概率分别用式
(
10.23
)
,
(
10.25
)
(10.23),(10.25)
(10.23),(10.25)中的
γ
t
(
i
)
,
ξ
t
(
i
,
j
)
\gamma_t(i),\xi_t(i,j)
γt(i),ξt(i,j)表示,则可以写成:
a
i
j
=
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
,
i
t
+
1
=
j
∣
λ
ˉ
)
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
∣
λ
ˉ
)
=
∑
t
=
1
T
−
1
P
(
i
t
=
i
,
i
t
+
1
=
j
∣
O
,
λ
ˉ
)
P
(
O
∣
λ
ˉ
)
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
∣
λ
ˉ
)
=
∑
t
=
1
T
−
1
P
(
i
t
=
i
,
i
t
+
1
=
j
∣
O
,
λ
ˉ
)
∑
t
=
1
T
−
1
P
(
O
,
i
t
=
i
∣
λ
ˉ
)
/
P
(
O
∣
λ
ˉ
)
=
∑
t
=
1
T
−
1
ξ
t
(
i
,
j
)
∑
t
=
1
T
−
1
γ
t
(
i
)
(10.39)
\begin{aligned} a_{ij} &= \frac{ \sum_{t=1}^{T-1} P(O,i_t=i,i_{t+1}=j|\bar \lambda)}{\sum_{t=1}^{T-1} P(O,i_t=i|\bar \lambda)} \\&= \frac{\sum_{t=1}^{T-1} P(i_t=i,i_{t+1}=j|O,\bar \lambda)P(O|\bar \lambda)}{\sum_{t=1}^{T-1} P(O,i_t=i|\bar \lambda) } \\ &= \frac{\sum_{t=1}^{T-1} P(i_t=i,i_{t+1}=j|O,\bar \lambda)}{\sum_{t=1}^{T-1} P(O,i_t=i|\bar \lambda) / P(O|\bar \lambda) } \\ &= \frac{\sum_{t=1}^{T-1} \xi_t(i,j)}{\sum_{t=1}^{T-1} \gamma_t(i)} \end{aligned} \tag{10.39}
aij=∑t=1T−1P(O,it=i∣λˉ)∑t=1T−1P(O,it=i,it+1=j∣λˉ)=∑t=1T−1P(O,it=i∣λˉ)∑t=1T−1P(it=i,it+1=j∣O,λˉ)P(O∣λˉ)=∑t=1T−1P(O,it=i∣λˉ)/P(O∣λˉ)∑t=1T−1P(it=i,it+1=j∣O,λˉ)=∑t=1T−1γt(i)∑t=1T−1ξt(i,j)(10.39)
b j ( k ) = ∑ t = 1 T P ( O , i t = j ∣ λ ˉ ) I ( o t = v k ) ∑ t = 1 T P ( O , i t = j ∣ λ ˉ ) = ∑ t = 1 T P ( i t = j ∣ O , λ ˉ ) I ( o t = v k ) ∑ t = 1 T P ( i t = j ∣ O , λ ˉ ) = ∑ t = 1 , o t = v k T γ t ( j ) ∑ t = 1 T γ t ( j ) (10.40) \begin{aligned} b_j(k) &= \frac{\sum_{t=1}^T P(O,i_t=j|\bar \lambda) I(o_t=v_k)}{\sum_{t=1}^T P(O,i_t=j|\bar \lambda)} \\ &= \frac{\sum_{t=1}^T P(i_t=j|O,\bar \lambda) I(o_t=v_k)}{\sum_{t=1}^T P(i_t=j|O,\bar \lambda)} \\ &= \frac{\sum_{t=1,o_t=v_k}^T \gamma_t(j)}{\sum_{t=1}^T \gamma_t(j)} \end{aligned} \tag{10.40} bj(k)=∑t=1TP(O,it=j∣λˉ)∑t=1TP(O,it=j∣λˉ)I(ot=vk)=∑t=1TP(it=j∣O,λˉ)∑t=1TP(it=j∣O,λˉ)I(ot=vk)=∑t=1Tγt(j)∑t=1,ot=vkTγt(j)(10.40)
π i = γ 1 ( i ) (10.41) \pi_i = \gamma_1(i) \tag{10.41} πi=γ1(i)(10.41)
然后就可以基于这种形式得到Baum-Welch算法的步骤。
预测算法
预算算法是用来解决预测问题的,即给定模型参数和观测序列,求出最有可能的状态序列。
近似算法
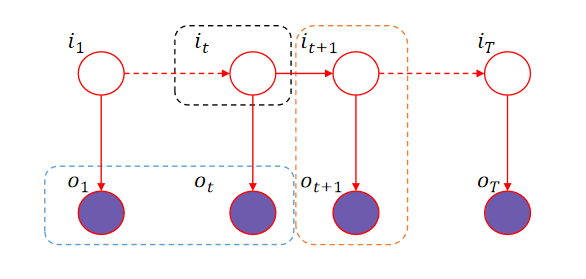
近似算法的思想是,在每个时刻 t t t选择在该时刻最有可能出现的状态 i t ∗ i_t^* it∗,从而得到一个状态序列 I ∗ = ( i 1 ∗ , i 2 ∗ , ⋯ , i T ∗ ) I^*=(i_1^*,i_2^*,\cdots,i_T^*) I∗=(i1∗,i2∗,⋯,iT∗),将它作为预测的结果。
(从式
(
10.24
)
(10.24)
(10.24))给定隐马尔可夫模型
λ
\lambda
λ和观测序列
O
O
O,在时刻
t
t
t处于状态
q
i
q_i
qi的概率
γ
t
(
i
)
\gamma_t(i)
γt(i)是
γ
t
(
i
)
=
α
t
(
i
)
β
t
(
i
)
P
(
O
∣
λ
)
=
α
t
(
i
)
β
t
(
i
)
∑
j
=
1
N
α
t
(
i
)
β
t
(
i
)
(10.42)
\gamma_t(i) = \frac{\alpha_t(i)\beta_t(i)}{P(O|\lambda)} = \frac{\alpha_t(i)\beta_t(i)}{\sum_{j=1}^N \alpha_t(i)\beta_t(i)} \tag{10.42}
γt(i)=P(O∣λ)αt(i)βt(i)=∑j=1Nαt(i)βt(i)αt(i)βt(i)(10.42)
在每一时刻
t
t
t最有可能的状态
i
t
∗
i^*_t
it∗是
i
t
∗
=
arg
max
1
≤
i
≤
N
[
γ
t
(
i
)
]
,
t
=
1
,
2
,
⋯
,
T
(10.43)
i^*_t = \arg \max_{1 \leq i \leq N} [\gamma_t(i)],\quad t=1,2,\cdots,T \tag{10.43}
it∗=arg1≤i≤Nmax[γt(i)],t=1,2,⋯,T(10.43)
从而得到状态序列
I
∗
=
(
i
1
∗
,
i
2
∗
,
⋯
,
i
T
∗
)
I^* = (i^*_1,i^*_2,\cdots,i^*_T)
I∗=(i1∗,i2∗,⋯,iT∗)。
近似算法的优点是计算简单,缺点是不能保证预测的状态序列整体是最有可能的状态序列。
维特比算法
维特比算法实际是用动态规划解决隐马尔可夫模型预测问题,即用动态规划求概率最大路径(最优路径)。这时一条路径对应着一个状态序列。
依据动态规划原理,我们从时刻 t = 1 t=1 t=1开始,递推地计算在时刻 t t t状态为 i i i的各条部分路径的最大概率,直到得到时刻 t = T t=T t=T状态为 i i i的各条路径的最大概率。然后,在时刻 t = T t=T t=T的最大概率即为最优路径的概率 P ∗ P^* P∗,最优路径的终结点 i T ∗ i_T^* iT∗也同时得到。然后从终结点开始,由后向前逐步求得结点 i T − 1 ∗ , ⋯ , i 1 ∗ i^*_{T-1},\cdots,i_1^* iT−1∗,⋯,i1∗,得到最优路径。
首先导入两个变量
δ
\delta
δ和
Ψ
\Psi
Ψ,定义在时刻
t
t
t状态为
i
i
i的所有单个路径
(
i
1
,
i
2
,
⋯
,
i
t
)
(i_1,i_2,\cdots,i_t)
(i1,i2,⋯,it)中概率最大值为
δ
t
(
i
)
=
max
i
1
,
⋯
,
i
t
−
1
P
(
i
t
=
i
,
i
t
−
1
,
⋯
,
i
1
,
o
t
,
⋯
,
o
1
∣
λ
)
,
i
=
1
,
2
,
⋯
,
N
(10.44)
\delta_t(i) = \max_{i_1,\cdots,i_{t-1}} P(i_t=i,i_{t-1},\cdots,i_1,o_t,\cdots,o_1|\lambda),\quad i=1,2,\cdots,N \tag{10.44}
δt(i)=i1,⋯,it−1maxP(it=i,it−1,⋯,i1,ot,⋯,o1∣λ),i=1,2,⋯,N(10.44)
由定义可得变量
δ
\delta
δ的递推公式:
δ
t
+
1
(
i
)
=
max
i
1
,
⋯
,
i
t
P
(
i
t
+
1
=
i
,
i
t
,
⋯
,
i
1
,
o
t
+
1
,
⋯
,
o
1
∣
λ
)
=
max
i
1
,
⋯
,
i
t
−
1
,
i
t
P
(
i
t
+
1
=
i
,
i
t
,
⋯
,
i
1
,
o
t
+
1
,
⋯
,
o
1
∣
λ
)
=
max
1
≤
j
≤
N
max
i
1
,
⋯
,
i
t
−
1
P
(
i
t
+
1
=
i
,
i
t
=
j
,
⋯
,
i
1
,
o
t
+
1
,
⋯
,
o
1
∣
λ
)
=
max
1
≤
j
≤
N
max
i
1
,
⋯
,
i
t
−
1
P
(
o
t
+
1
,
i
t
+
1
=
i
∣
i
t
=
j
,
⋯
,
i
1
,
o
t
,
⋯
,
o
1
,
λ
)
P
(
i
t
=
j
,
⋯
,
i
1
,
o
t
,
⋯
,
o
1
∣
λ
)
=
max
1
≤
j
≤
N
δ
t
(
j
)
P
(
o
t
+
1
,
i
t
+
1
=
i
∣
i
t
=
j
,
⋯
,
i
1
,
o
t
,
⋯
,
o
1
,
λ
)
=
max
1
≤
j
≤
N
δ
t
(
j
)
P
(
o
t
+
1
,
i
t
+
1
=
i
∣
i
t
=
j
,
λ
)
D
−
划
分
=
max
1
≤
j
≤
N
δ
t
(
j
)
P
(
o
t
+
1
∣
i
t
+
1
=
i
,
i
t
=
j
,
λ
)
P
(
i
t
+
1
=
i
∣
i
t
=
j
,
λ
)
=
max
1
≤
j
≤
N
δ
t
(
j
)
P
(
o
t
+
1
∣
i
t
+
1
=
i
,
λ
)
P
(
i
t
+
1
=
i
∣
i
t
=
j
,
λ
)
=
max
1
≤
j
≤
N
δ
t
(
j
)
b
i
(
o
t
+
1
)
a
j
i
=
max
1
≤
j
≤
N
[
δ
t
(
j
)
a
j
i
]
b
i
(
o
t
+
1
)
,
i
=
1
,
2
,
⋯
,
N
;
t
=
1
,
2
,
⋯
,
T
−
1
(10.45)
\begin{aligned} \delta_{t+1}(i) &= \max_{i_1,\cdots,i_{t}} P(i_{t+1}=i,i_{t},\cdots,i_1,o_{t+1},\cdots,o_1|\lambda) \\ &= \max_{i_1,\cdots,i_{t-1},i_t} P(i_{t+1}=i,i_{t},\cdots,i_1,o_{t+1},\cdots,o_1|\lambda) \\ &= \max_{1 \leq j \leq N} \max_{i_1,\cdots,i_{t-1}} P(i_{t+1}=i,i_{t}=j,\cdots,i_1,o_{t+1},\cdots,o_1|\lambda) \\ &= \max_{1 \leq j \leq N} \max_{i_1,\cdots,i_{t-1}} P(o_{t+1},i_{t+1}=i|i_{t}=j,\cdots,i_1,o_{t},\cdots,o_1,\lambda) P(i_{t}=j,\cdots,i_1,o_{t},\cdots,o_1|\lambda)\\ &= \max_{1 \leq j \leq N} \delta_t(j) P(o_{t+1},i_{t+1}=i|i_{t}=j,\cdots,i_1,o_{t},\cdots,o_1,\lambda) \\ &= \max_{1 \leq j \leq N} \delta_t(j) P(o_{t+1},i_{t+1}=i|i_{t}=j,\lambda) & D-划分\\ &= \max_{1 \leq j \leq N} \delta_t(j) P(o_{t+1}|i_{t+1}=i,i_{t}=j,\lambda)P(i_{t+1}=i|i_{t}=j,\lambda) \\ &= \max_{1 \leq j \leq N} \delta_t(j) P(o_{t+1}|i_{t+1}=i,\lambda)P(i_{t+1}=i|i_{t}=j,\lambda) \\ &= \max_{1 \leq j \leq N} \delta_t(j) b_{i}(o_{t+1})a_{ji} \\ &= \max_{1 \leq j \leq N} [\delta_t(j)a_{ji}] b_{i}(o_{t+1}) ,\quad i=1,2,\cdots,N;\quad t=1,2,\cdots,T-1 \end{aligned} \tag{10.45}
δt+1(i)=i1,⋯,itmaxP(it+1=i,it,⋯,i1,ot+1,⋯,o1∣λ)=i1,⋯,it−1,itmaxP(it+1=i,it,⋯,i1,ot+1,⋯,o1∣λ)=1≤j≤Nmaxi1,⋯,it−1maxP(it+1=i,it=j,⋯,i1,ot+1,⋯,o1∣λ)=1≤j≤Nmaxi1,⋯,it−1maxP(ot+1,it+1=i∣it=j,⋯,i1,ot,⋯,o1,λ)P(it=j,⋯,i1,ot,⋯,o1∣λ)=1≤j≤Nmaxδt(j)P(ot+1,it+1=i∣it=j,⋯,i1,ot,⋯,o1,λ)=1≤j≤Nmaxδt(j)P(ot+1,it+1=i∣it=j,λ)=1≤j≤Nmaxδt(j)P(ot+1∣it+1=i,it=j,λ)P(it+1=i∣it=j,λ)=1≤j≤Nmaxδt(j)P(ot+1∣it+1=i,λ)P(it+1=i∣it=j,λ)=1≤j≤Nmaxδt(j)bi(ot+1)aji=1≤j≤Nmax[δt(j)aji]bi(ot+1),i=1,2,⋯,N;t=1,2,⋯,T−1D−划分(10.45)
P
(
o
t
+
1
,
i
t
+
1
=
i
∣
i
t
=
j
,
⋯
,
i
1
,
o
t
,
⋯
,
o
1
,
λ
)
=
P
(
o
t
+
1
,
i
t
+
1
=
i
∣
i
t
=
j
,
λ
)
P(o_{t+1},i_{t+1}=i|i_{t}=j,\cdots,i_1,o_{t},\cdots,o_1,\lambda)=P(o_{t+1},i_{t+1}=i|i_{t}=j,\lambda)
P(ot+1,it+1=i∣it=j,⋯,i1,ot,⋯,o1,λ)=P(ot+1,it+1=i∣it=j,λ)利用了D-划分:
维特比算法很像前向算法除了前者取上个时刻路径概率的最大值,而后者取的是求和。
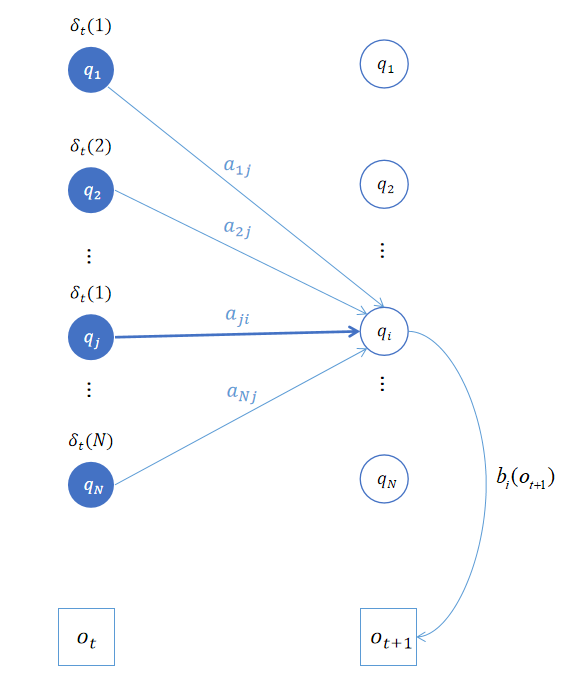
该递推公式除了通过推导,还可以通过画图来理解。如上图所示,已知 t t t时刻各个状态下的 δ t ( j ) , 1 ≤ j ≤ N \delta_t(j),\,\, 1\leq j\leq N δt(j),1≤j≤N。那么 δ t + 1 ( i ) \delta_{t+1}(i) δt+1(i)即在 t t t时刻状态为 j j j的 δ t ( j ) \delta_t(j) δt(j)乘以由状态 j j j转移到 t + 1 t+1 t+1时刻状态 i i i的概率的最大者,再乘以由状态 i i i观测到输出 o t + 1 o_{t+1} ot+1的概率。
定义在时刻
t
t
t状态为
i
i
i的所有单个路径
(
i
1
,
i
2
,
⋯
,
i
t
)
(i_1,i_2,\cdots,i_t)
(i1,i2,⋯,it)中概率最大的路径的第
t
−
1
t-1
t−1个结点为
Ψ
t
(
i
)
=
arg
max
1
≤
j
≤
N
[
δ
t
(
j
)
a
j
i
]
,
i
=
1
,
2
,
⋯
,
N
(10.46)
\Psi_t(i) = \arg \max_{1 \leq j \leq N} [\delta_t(j)a_{ji}],\quad i=1,2,\cdots,N \tag{10.46}
Ψt(i)=arg1≤j≤Nmax[δt(j)aji],i=1,2,⋯,N(10.46)
算法 10.5 (维特比算法)
输入: 模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测 O = ( o 1 , o 2 , ⋯ , o T ) O=(o_1,o_2,\cdots,o_T) O=(o1,o2,⋯,oT);
输出: 最优路径 I ∗ = ( i 1 ∗ , i 2 ∗ , ⋯ , i T ∗ ) I^* = (i^*_1,i^*_2,\cdots,i^*_T) I∗=(i1∗,i2∗,⋯,iT∗)。
(1) 初始化
δ
1
(
i
)
=
π
i
b
i
(
o
1
)
,
i
=
1
,
2
,
⋯
,
N
Ψ
1
(
i
)
=
0
,
i
=
1
,
2
,
⋯
,
N
\delta_1(i) = \pi_ib_i(o_1), \quad i=1,2,\cdots,N \\ \Psi_1(i) = 0, \quad i=1,2,\cdots,N
δ1(i)=πibi(o1),i=1,2,⋯,NΨ1(i)=0,i=1,2,⋯,N
在时刻
t
=
1
t=1
t=1状态为
i
i
i的概率最大值即为初始概率乘以
b
i
(
o
1
)
b_i(o_1)
bi(o1),
Ψ
1
(
i
)
=
0
\Psi_1(i)=0
Ψ1(i)=0表示未知,或者说后面回溯时的终止条件。
(2) 递推。对
t
=
2
,
3
,
⋯
,
T
t=2,3,\cdots,T
t=2,3,⋯,T
δ
t
(
i
)
=
max
1
≤
j
≤
N
[
δ
t
−
1
(
j
)
a
j
i
]
b
i
(
o
t
)
,
i
=
1
,
2
,
⋯
,
N
Ψ
t
(
i
)
=
arg
max
1
≤
j
≤
N
[
δ
t
−
1
(
j
)
a
j
i
]
,
i
=
1
,
2
,
⋯
,
N
\delta_t(i) = \max_{1 \leq j \leq N} [\delta_{t-1}(j)a_{ji}]b_i(o_{t}),\quad i=1,2,\cdots,N \\ \Psi_t(i) = \arg \max_{1 \leq j \leq N} [\delta_{t-1}(j)a_{ji}],\quad i=1,2,\cdots,N
δt(i)=1≤j≤Nmax[δt−1(j)aji]bi(ot),i=1,2,⋯,NΨt(i)=arg1≤j≤Nmax[δt−1(j)aji],i=1,2,⋯,N
根据递归公式由前一时刻的最大值来计算当前时刻。
(3) 终止
终止就是计算各个状态的最大概率:
P
∗
=
max
1
≤
i
≤
N
δ
T
(
i
)
i
T
∗
=
arg
max
1
≤
i
≤
N
[
δ
T
(
i
)
]
P^* = \max_{1 \leq i \leq N} \delta_T(i) \\ i^*_T = \arg \max_{1 \leq i \leq N} [\delta_T(i)]
P∗=1≤i≤NmaxδT(i)iT∗=arg1≤i≤Nmax[δT(i)]
(4) 最优路径回溯。对
t
=
T
−
1
,
T
−
2
,
⋯
,
1
t=T-1,T-2,\cdots,1
t=T−1,T−2,⋯,1
上一步得到的
T
T
T时刻的终结点,然后从
T
−
1
T-1
T−1时刻利用
i
T
−
1
∗
=
Ψ
T
(
i
T
∗
)
i^*_{T-1}=\Psi_{T}(i^*_{T})
iT−1∗=ΨT(iT∗)求得
T
T
T时刻状态为
i
T
∗
i^*_T
iT∗概率最大路径的前一个时刻最优结点
i
T
−
1
∗
i^*_{T-1}
iT−1∗,以此类推:
i
t
∗
=
Ψ
t
+
1
(
i
t
+
1
∗
)
i_t^* = \Psi_{t+1}(i^*_{t+1})
it∗=Ψt+1(it+1∗)
求得最优路径
I
∗
=
(
i
1
∗
,
i
2
∗
,
⋯
,
i
T
∗
)
I^*=(i_1^*,i_2^*,\cdots,i_T^*)
I∗=(i1∗,i2∗,⋯,iT∗)。
下面通过书上的例子,并画图来理解一下维特比算法。
**例 10.3 ** 已知模型参数 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测序列 O = ( 红 , 白 , 红 ) O=(红,白,红) O=(红,白,红),试求最优状态序列,即最优路径。
按照上面介绍的维特比算法一步一步来求。
对于
t
=
1
t=1
t=1,即初始化时,对所有的状态
i
(
i
=
1
,
2
,
3
)
i\,\,(i=1,2,3)
i(i=1,2,3)求状态为
i
i
i观测
o
1
o_1
o1为红球的概率
δ
1
(
i
)
\delta_1(i)
δ1(i):
δ
1
(
1
)
=
π
1
b
1
(
o
1
)
=
0.2
×
0.5
=
0.10
δ
1
(
2
)
=
π
2
b
2
(
o
1
)
=
0.4
×
0.4
=
0.16
δ
1
(
3
)
=
π
3
b
3
(
o
1
)
=
0.4
×
0.7
=
0.28
\delta_1(1) = \pi_1b_1(o_1) = 0.2 \times 0.5 = 0.10 \\ \delta_1(2) = \pi_2b_2(o_1) = 0.4 \times 0.4 = 0.16 \\ \delta_1(3) = \pi_3b_3(o_1) = 0.4 \times 0.7 = 0.28
δ1(1)=π1b1(o1)=0.2×0.5=0.10δ1(2)=π2b2(o1)=0.4×0.4=0.16δ1(3)=π3b3(o1)=0.4×0.7=0.28
且
Ψ
1
(
i
)
=
0
,
i
=
1
,
2
,
3
\Psi_1(i) = 0, \quad i=1,2,3
Ψ1(i)=0,i=1,2,3。
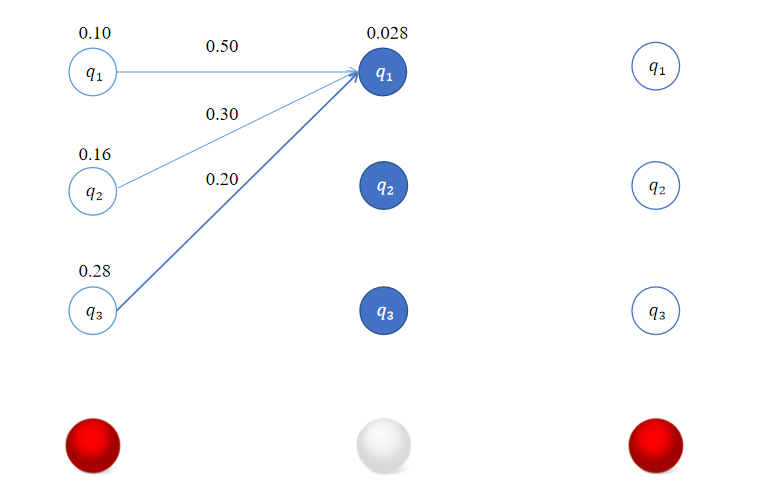
此时,如下图所示:

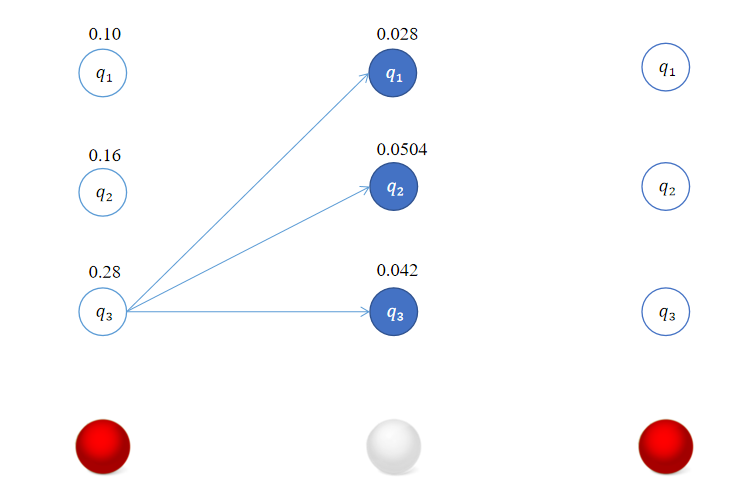
对于 t = 2 t=2 t=2,对所有的状态 i ( i = 1 , 2 , 3 ) i\,\,(i=1,2,3) i(i=1,2,3)求状态为 i i i观测 o 2 o_2 o2为白球的概率 δ 2 ( i ) \delta_2(i) δ2(i)。
对于
i
=
1
i=1
i=1有:
δ
2
(
1
)
=
max
1
≤
j
≤
3
[
δ
1
(
j
)
a
j
1
]
b
1
(
o
2
)
=
max
[
0.1
×
0.5
,
0.16
×
0.3
,
0.28
×
0.2
]
×
0.5
=
0.056
×
0.5
=
0.028
\delta_2(1) = \max_{1 \leq j \leq 3} [\delta_{1}(j)a_{j1}]b_1(o_{2}) = \max [0.1 \times 0.5,0.16 \times 0.3,0.28 \times 0.2] \times 0.5 = 0.056 \times 0.5 = 0.028
δ2(1)=1≤j≤3max[δ1(j)aj1]b1(o2)=max[0.1×0.5,0.16×0.3,0.28×0.2]×0.5=0.056×0.5=0.028
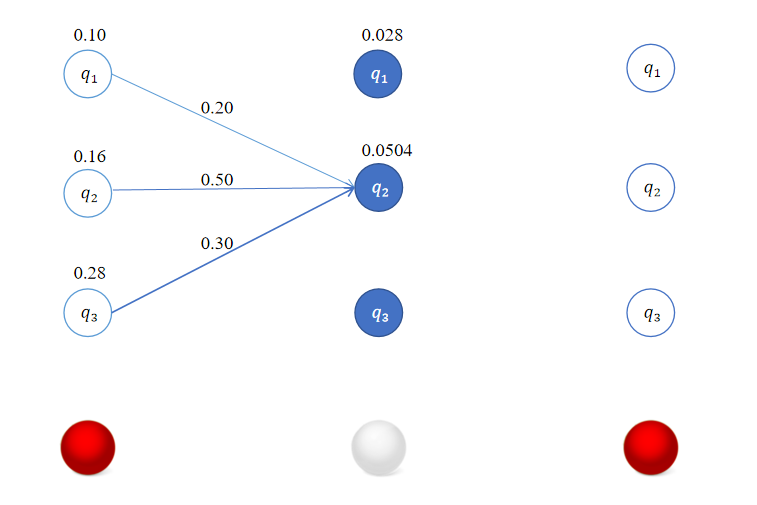
类似地,对于
i
=
2
i=2
i=2有:
δ
2
(
2
)
=
max
1
≤
j
≤
3
[
δ
1
(
j
)
a
j
2
]
b
2
(
o
2
)
=
max
[
0.1
×
0.2
,
0.16
×
0.5
,
0.28
×
0.3
]
×
0.6
=
0.084
×
0.6
=
0.0504
\delta_2(2) = \max_{1 \leq j \leq 3} [\delta_{1}(j)a_{j2}]b_2(o_{2}) = \max [0.1\times 0.2,0.16 \times 0.5,0.28 \times 0.3] \times 0.6 = 0.084 \times 0.6 = 0.0504
δ2(2)=1≤j≤3max[δ1(j)aj2]b2(o2)=max[0.1×0.2,0.16×0.5,0.28×0.3]×0.6=0.084×0.6=0.0504
对于
i
=
3
i=3
i=3有:
δ
2
(
3
)
=
max
1
≤
j
≤
3
[
δ
1
(
j
)
a
j
3
]
b
3
(
o
2
)
=
max
[
0.1
×
0.3
,
0.16
×
0.2
,
0.28
×
0.5
]
×
0.3
=
0.14
×
0.3
=
0.042
\delta_2(3) = \max_{1 \leq j \leq 3} [\delta_{1}(j)a_{j3}]b_3(o_{2}) = \max [0.1\times 0.3,0.16 \times 0.2,0.28 \times 0.5] \times 0.3 = 0.14 \times 0.3 = 0.042
δ2(3)=1≤j≤3max[δ1(j)aj3]b3(o2)=max[0.1×0.3,0.16×0.2,0.28×0.5]×0.3=0.14×0.3=0.042
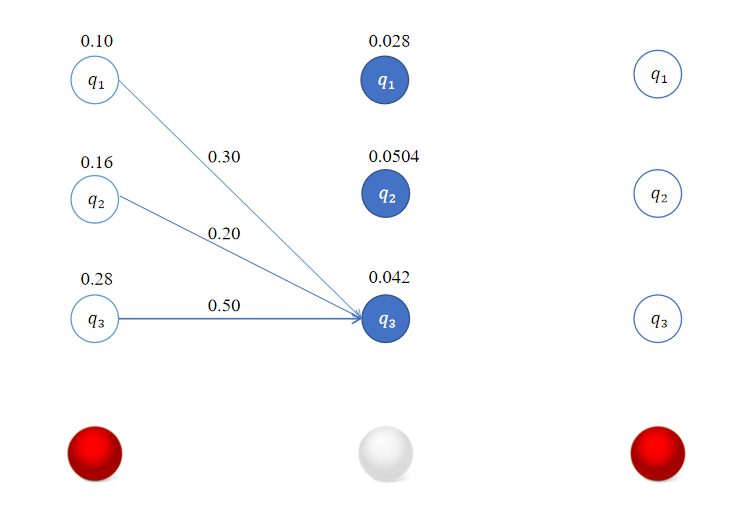
这样我们得到了在时刻 t = 2 t=2 t=2时,转移到各个状态的最优路径,这里恰巧它们都是从 t = 1 t=1 t=1时状态 q 3 q_3 q3出发的。
同理,对于
t
=
3
t=3
t=3,对所有的状态
i
(
i
=
1
,
2
,
3
)
i\,\,(i=1,2,3)
i(i=1,2,3)求状态为
i
i
i观测
o
3
o_3
o3为红球的概率
δ
3
(
i
)
\delta_3(i)
δ3(i)。
δ
3
(
1
)
=
max
1
≤
j
≤
3
[
δ
2
(
j
)
a
j
1
]
b
1
(
o
3
)
=
max
[
0.028
×
0.5
,
0.0504
‾
×
0.3
,
0.042
×
0.2
]
×
0.5
=
0.01512
×
0.5
=
0.000756
δ
3
(
2
)
=
max
1
≤
j
≤
3
[
δ
2
(
j
)
a
j
2
]
b
2
(
o
3
)
=
max
[
0.028
×
0.2
,
0.0504
‾
×
0.5
,
0.042
×
0.3
]
×
0.4
=
0.02520
×
0.4
=
0.001008
δ
3
(
3
)
=
max
1
≤
j
≤
3
[
δ
2
(
j
)
a
j
3
]
b
3
(
o
3
)
=
max
[
0.028
×
0.3
,
0.0504
×
0.2
,
0.042
‾
×
0.5
]
×
0.7
=
0.02100
×
0.7
=
0.001470
\delta_3(1) = \max_{1 \leq j \leq 3} [\delta_{2}(j)a_{j1}]b_1(o_{3}) = \max [0.028 \times 0.5,\overline{0.0504} \times 0.3,0.042 \times 0.2] \times 0.5 = 0.01512 \times 0.5 = 0.000756 \\ \delta_3(2) = \max_{1 \leq j \leq 3} [\delta_{2}(j)a_{j2}]b_2(o_{3}) = \max [0.028 \times 0.2,\overline{0.0504} \times 0.5,0.042 \times 0.3] \times 0.4 = 0.02520 \times 0.4 = 0.001008 \\ \delta_3(3) = \max_{1 \leq j \leq 3} [\delta_{2}(j)a_{j3}]b_3(o_{3}) = \max [0.028 \times 0.3,0.0504 \times 0.2,\overline{0.042} \times 0.5] \times 0.7 = 0.02100 \times 0.7 = 0.001470
δ3(1)=1≤j≤3max[δ2(j)aj1]b1(o3)=max[0.028×0.5,0.0504×0.3,0.042×0.2]×0.5=0.01512×0.5=0.000756δ3(2)=1≤j≤3max[δ2(j)aj2]b2(o3)=max[0.028×0.2,0.0504×0.5,0.042×0.3]×0.4=0.02520×0.4=0.001008δ3(3)=1≤j≤3max[δ2(j)aj3]b3(o3)=max[0.028×0.3,0.0504×0.2,0.042×0.5]×0.7=0.02100×0.7=0.001470
最终我们得到的结果如下:
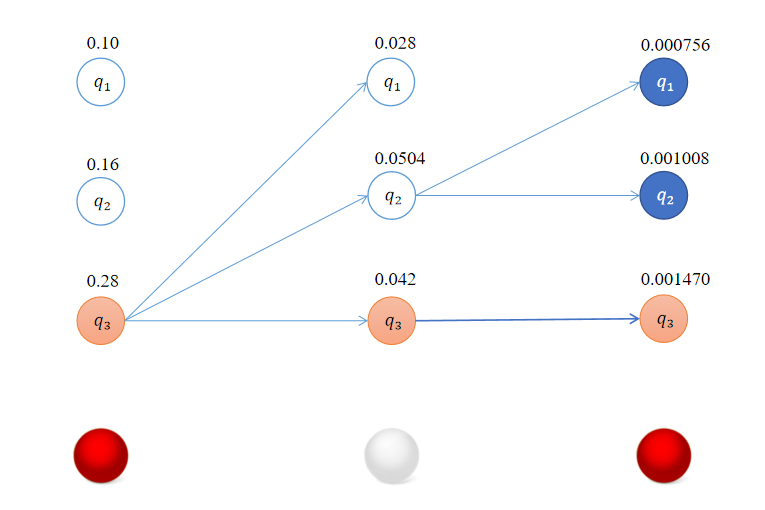
回溯得到最优路径的状态序列 ( q 3 , q 3 , q 3 ) (q_3,q_3,q_3) (q3,q3,q3)。
参考
- 统计学习方法 第二版
- 概率导论
- 维基百科
- PRML
- MLAPP