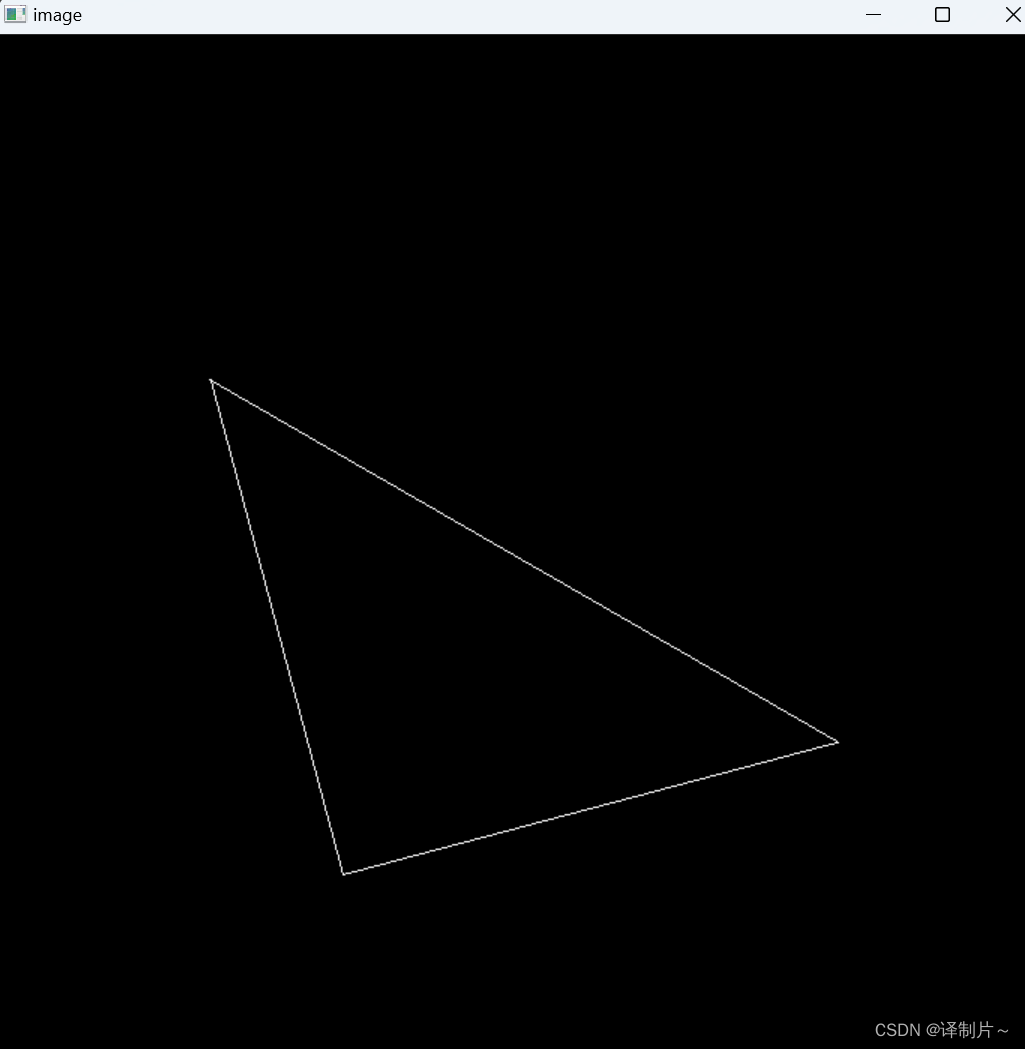
作业1的大致要求就是让我们实现如下两个函数,一个是返回在三维空间中绕着Z轴旋转的矩阵,另一个是返回投影矩阵。正确完成这两个函数之后,运行代码你就会在窗口中看到一个三角形,并且按a键和d键会发生旋转。
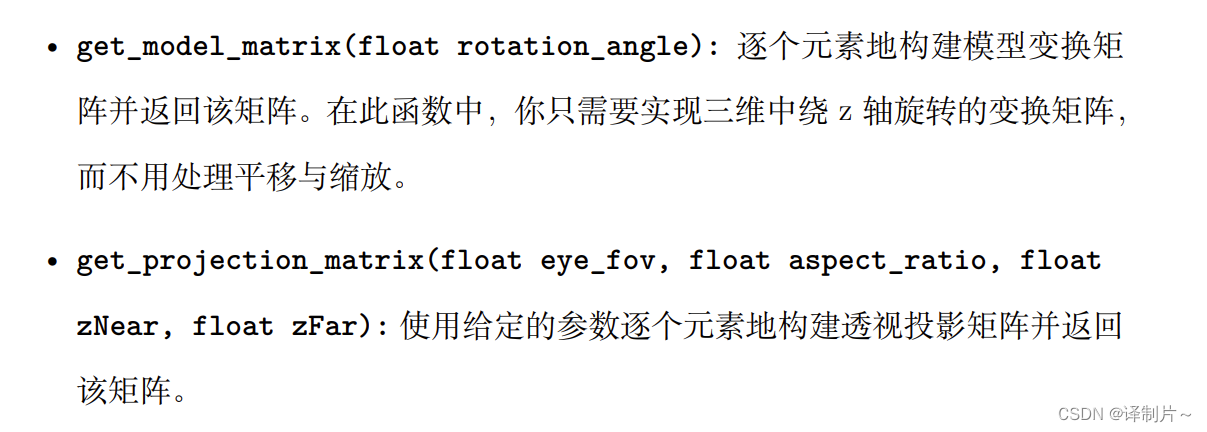
首先来实现get_model_matrix函数,在这个函数里只需要写出绕着Z轴旋转的旋转矩阵就行,下图是物体绕着X,Y,Z轴旋转的旋转矩阵公式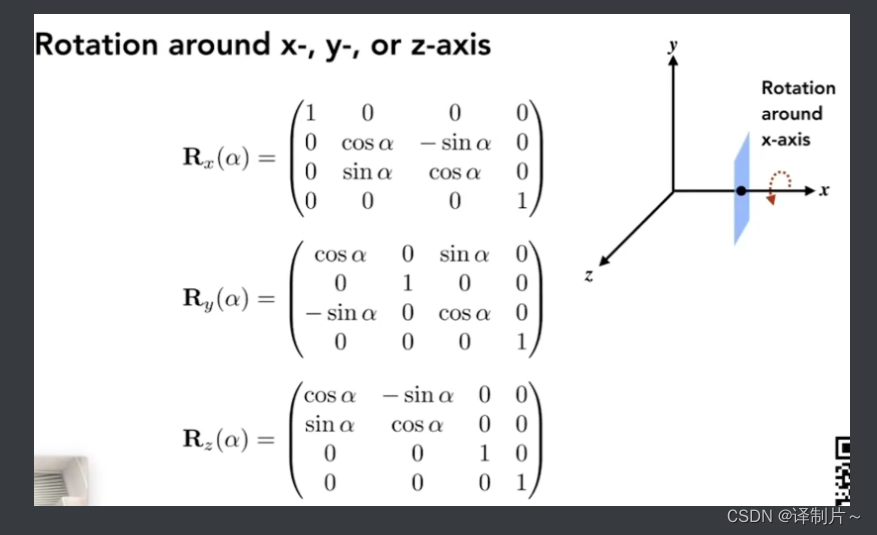
根据旋转矩阵的公式就可以直接写出对应的旋转矩阵,代码如下:
Eigen::Matrix4f get_model_matrix(float rotation_angle)
{
Eigen::Matrix4f model = Eigen::Matrix4f::Identity();
// TODO: Implement this function
// Create the model matrix for rotating the triangle around the Z axis.
// Then return it.
float angle = rotation_angle/180*acos(-1);
//创建旋转矩阵
model << cos(angle),-sin(angle),0,0,
sin(angle),cos(angle),0,0,
0,0,1,0,
0,0,0,1;
return model;
}
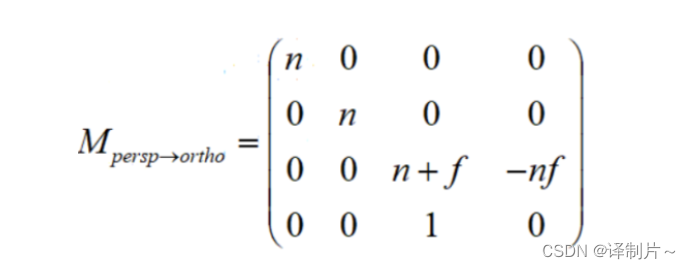
接着实现get_projection_matrix函数,在这个函数里需要创建透视投影矩阵。创建透视投影矩阵的过程是将透视变换为正交,在进行正交投影即可。该函数提供的参数eye_fov表示垂直可视角度,aspect_ratio表示宽高比,zNear表示相机与近平面的距离,zFar表示相机与远平面的距离。
-
透视变正交
矩阵公式如下:
-
正交投影矩阵
公式如下(先平移在缩放):

公式里面参数的意义如下:
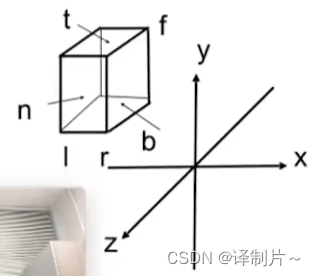
在这里需要注意的是透视变为正交之后,l 和 r、t 和 b是关于原点对称的,所以公式中的 l + r = 0,t + b = 0,相当于沿着 Z 轴平移。
代码如下:
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio,
float zNear, float zFar)
{
// Students will implement this function
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();
// TODO: Implement this function
// Create the projection matrix for the given parameters.
// Then return it.
//创建透视变正交 矩阵
Eigen::Matrix4f m = Eigen::Matrix4f::Identity();;
m << zNear,0,0,0,
0,zNear,0,0,
0,0,zNear+zFar,-zNear*zFar,
0,0,1,0;
//创建正交投影矩阵
Eigen::Matrix4f q1 = Eigen::Matrix4f::Identity(),q2 = Eigen::Matrix4f::Identity();
//求出高度、宽度
float height = tan(eye_fov/2/180*acos(-1)) * zNear * 2; //height = t - b
float width = height * aspect_ratio; //width = r - l
//缩放
q1 << 2.0/width,0,0,0,
0,2.0/height,0,0,
0,0,2.0/(zNear - zFar),0,
0,0,0,1;
//平移
q2 << 1,0,0,0,
0,1,0,0,
0,0,1,-(zNear+zFar)/2.0,
0,0,0,1;
projection = q1 * q2 * m;
return projection;
}
默认结果如下:
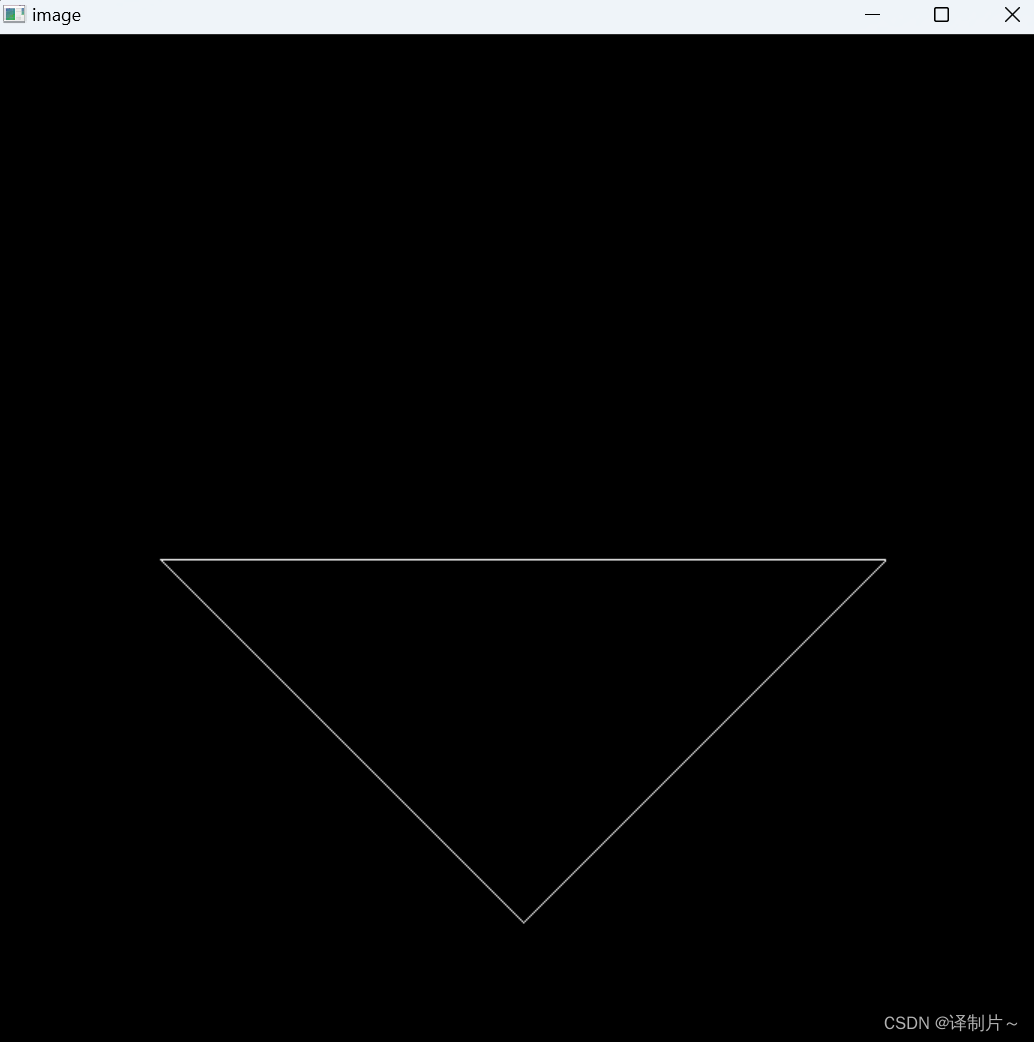
按了三下d结果如下: