这里写目录标题
- H桥
- 电流采集电路
- 电源电压采集电路
- 温度采集电路
- 过流检测电路
- 过流保护电路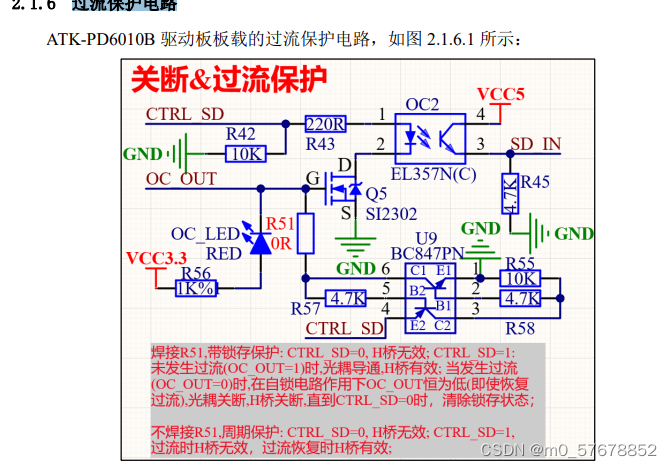
H桥
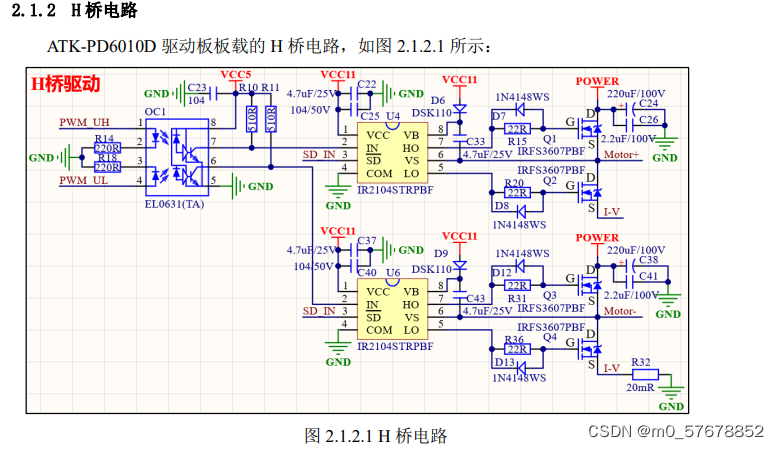
因为光耦(EL0631)作用,PWM 引脚电平输入IN相反。
然后半桥芯片的逻辑表为:
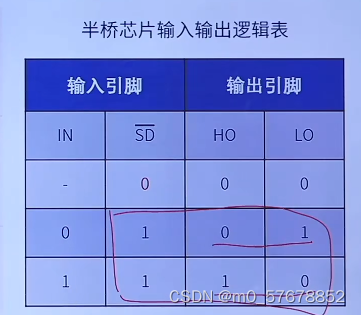
综上所述当
SD’输入为0时,输出引脚HO和LO都为0
SD’输入不为0时,当PWM输入高电平则,HO为低电平,L0为高电平,所以Motor拉低。
SD’输入不为0时,当PWM输入低电平则,HO为高电平,L0为低电平,所以Motor拉高。
Motor一高一低,外接电机就可以形成回路,产生电流来驱动电机,
通过改变两个Motor的极性就可以改变电流方向,从而改变电机的转动方向。
通过改变电流的导通时间,来控制电机转速。
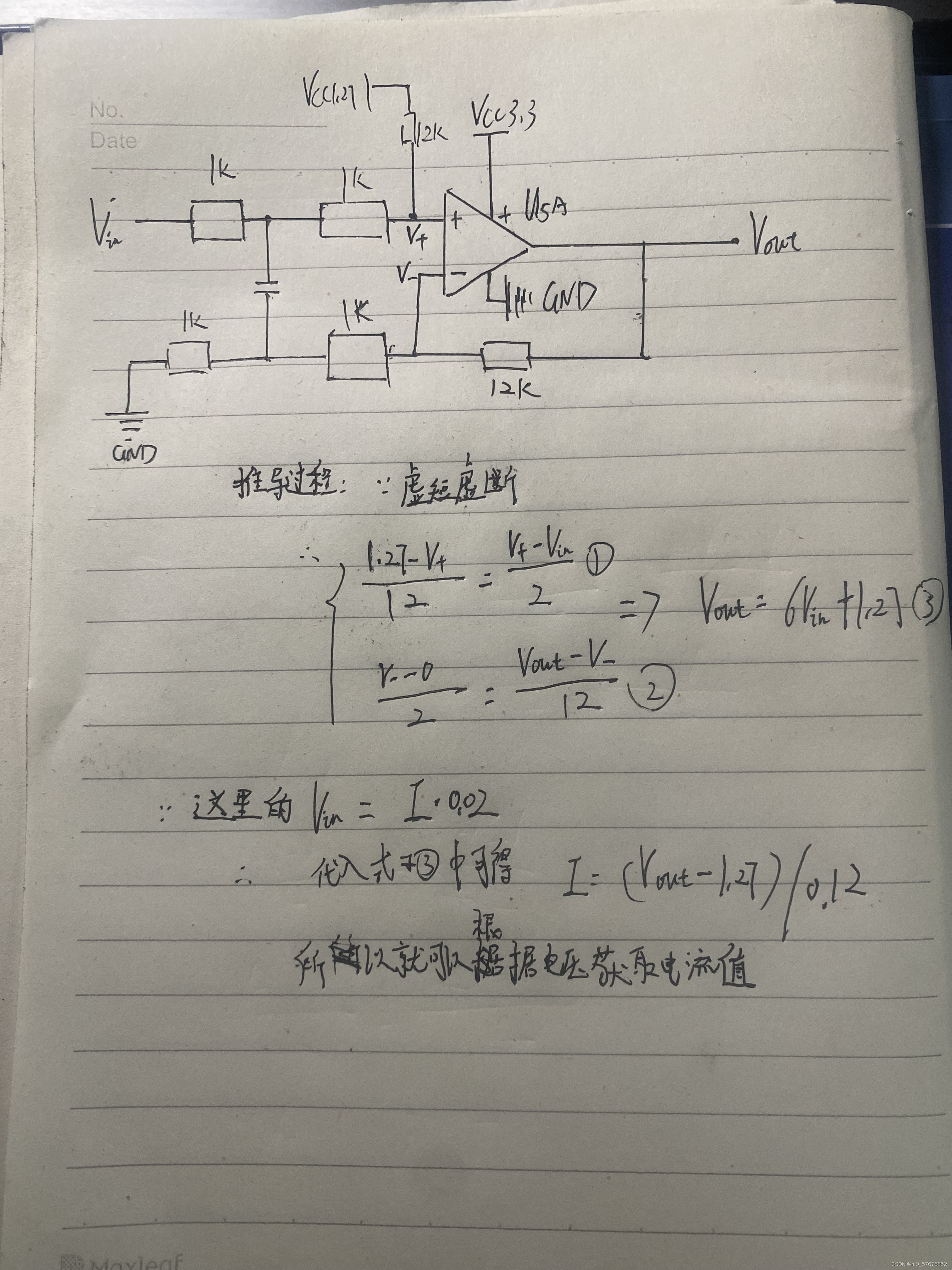
电流采集电路
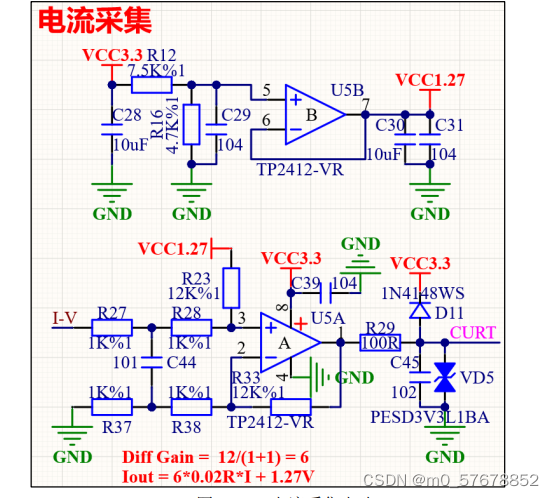
结论: I = (CURT-1.27)/0.12
计算过程推导:
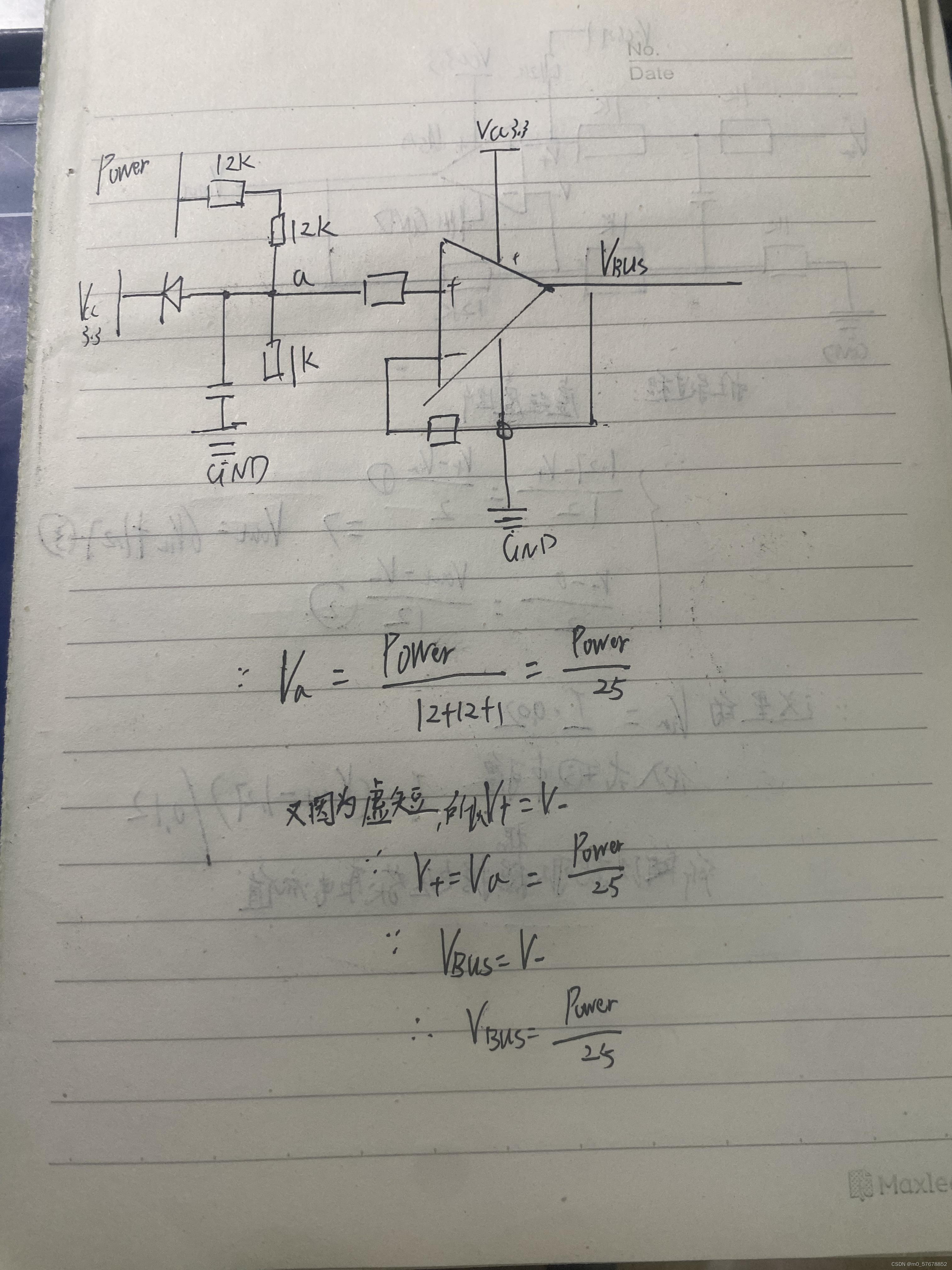
电源电压采集电路
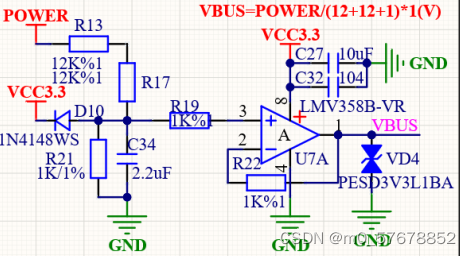
结论:VBUS = POWER/(12K+12K+1K)*1K=POWER/25
推导过程:
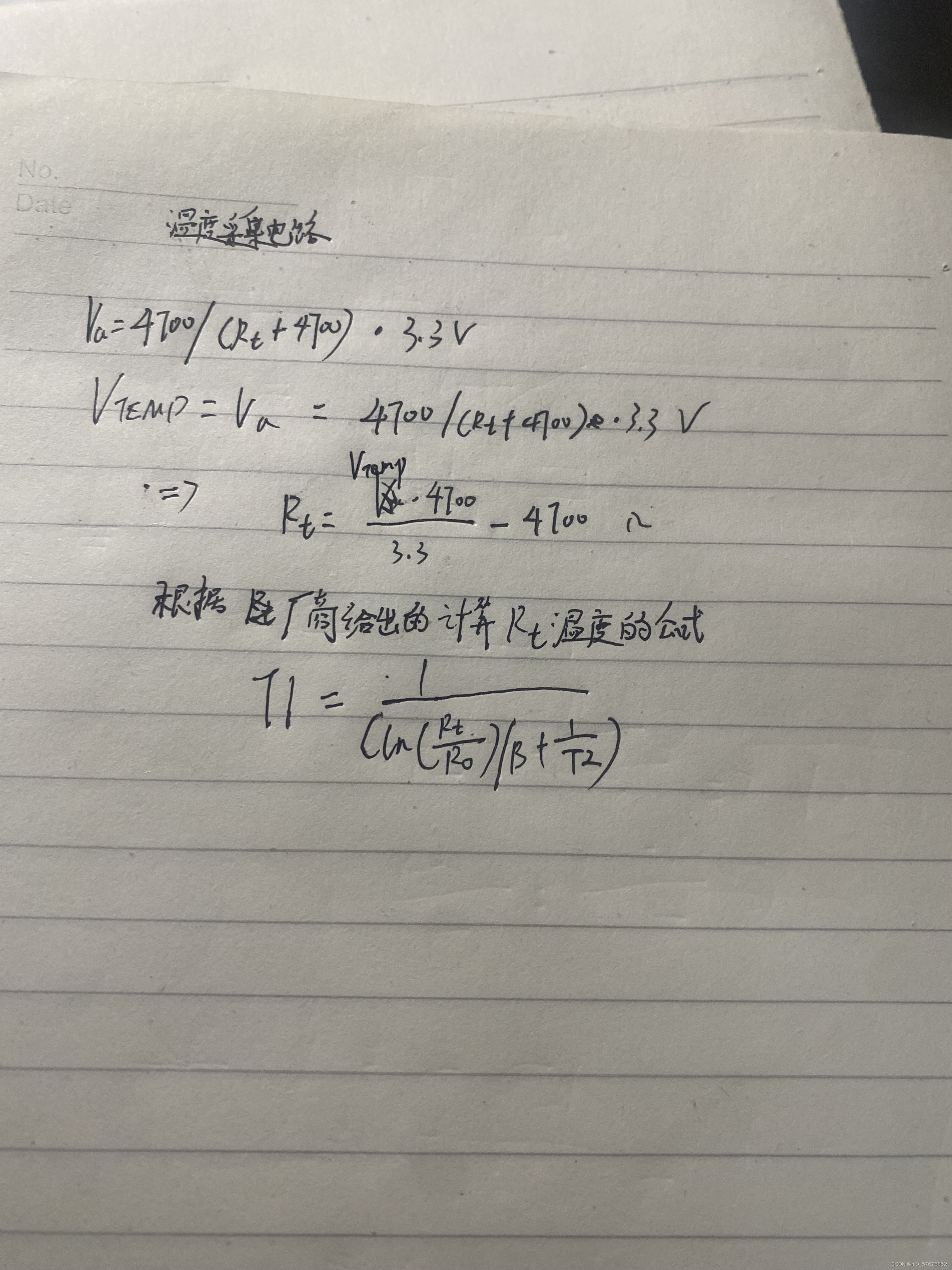
温度采集电路
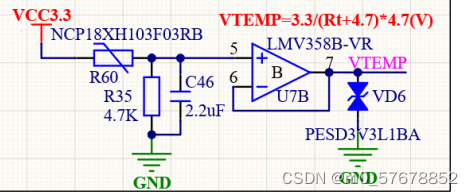
结论:VTMEP = 3.3V/(Rt+4.7K)*4.7K
Rt = 4700VTEMP/3.3 - 4700
T1 = 1/( ((ln(RT/R0)/B)+1/T2))
过流检测电路
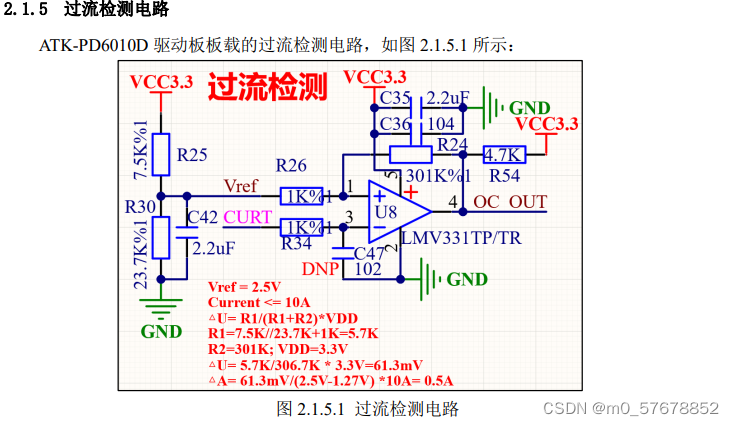
当CURT接入的电流超过10.25A+0.5A时会触发过流检测,OC_OUT(默认R54上拉)输出低
当OC_OUT为低电平时,OC_LED亮起
过流保护电路
当OC_OUT为高电平,CTRL_SD输入高电平时,
SD_IN输出高电平(默认下拉),使能半桥驱动IC,
否则SD_IN为低电平,关闭板桥驱动IC,
当过流产生时,会产生自锁,这时需要将CTRL_SD给个低电平,解除自锁,才能再次有机会使能H桥(还需让OC_OUT变为高电平)