[HDU - 4578]Transformation(线段树+多重懒标记)
- 一、问题
- 二、分析
- 1、节点定义
- 2、pushup
- 3、pushdown
- (1)每种标记如何下传?
- 赋值
- 乘法
- 加法
- (2)三种标记下传的优先级问题
- 三、代码
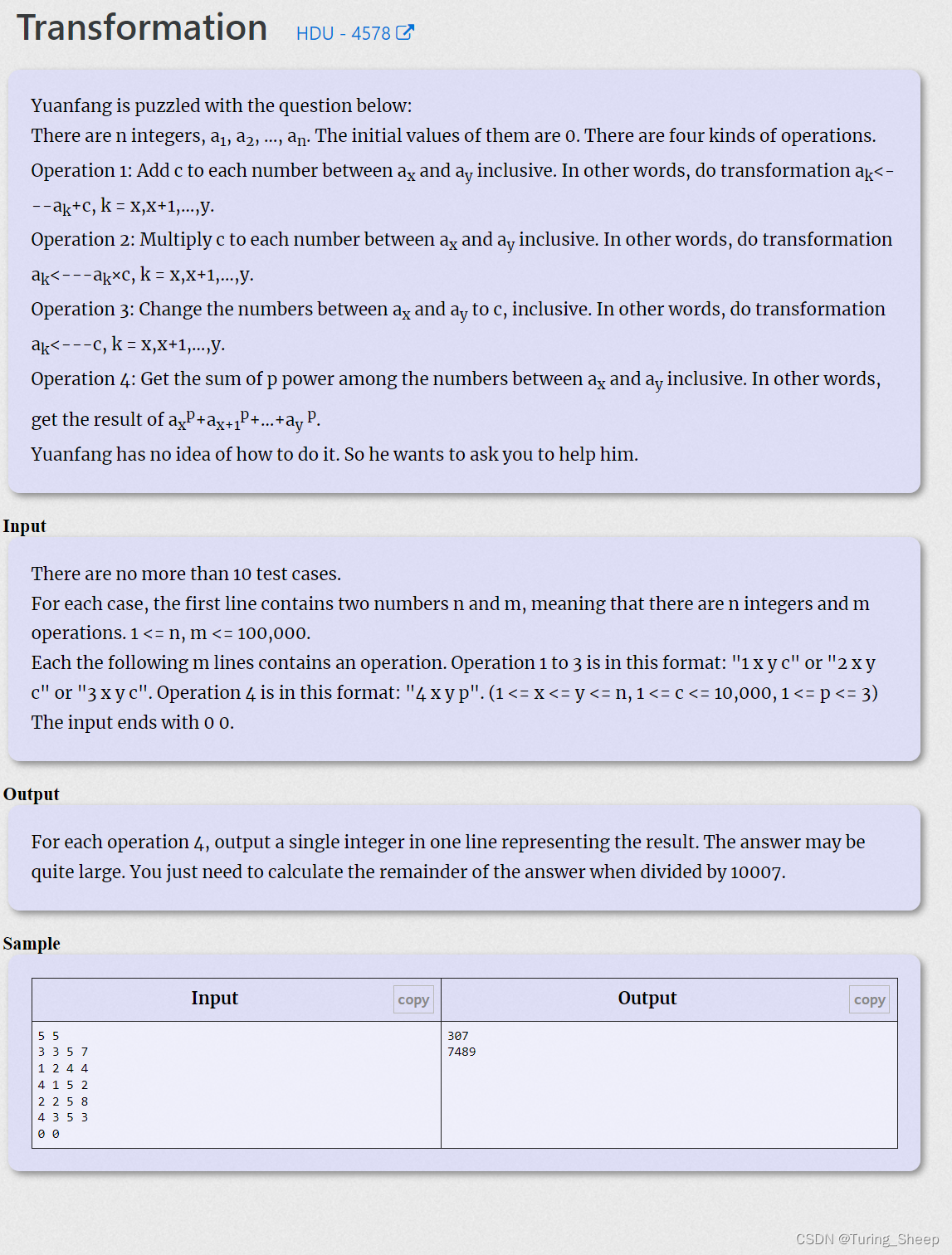
一、问题
二、分析
这道题涉及到了区间操作,所以我们用线段树算法。同时,这道题里面有区间修改的操作,所以我们还要用到懒标记。
这里一共有三种区间的操作,分别是:加、乘、赋值。这三种操作无法用一个懒标记来统一,所以我们需要使用三个懒标记来完成这道题。
这道题的查询操作也分为三种,一次方的和、二次方的和、三次方的和。
所以我们需要去维护三种 s u m sum sum。
1、节点定义
/*
tag_1 --> 加法
tag_2 --> 乘法
tag_3 --> 赋值
*/
struct Node
{
int l, r;
int sum1, sum2, sum3;
int tag_1, tag_2, tag_3;
}tre[N * 4];
2、pushup
p u s h u p pushup pushup函数就是利用子节点来更新父节点,这个操作比较简单,直接合并三种和即可。
//lson 是左儿子, rson是右儿子
void pushup(int u)
{
tre[u].sum1 = (tre[lson].sum1 + tre[rson].sum1) % mod;
tre[u].sum2 = (tre[lson].sum2 + tre[rson].sum2) % mod;
tre[u].sum3 = (tre[lson].sum3 + tre[rson].sum3) % mod;
}
3、pushdown
p
u
s
h
d
o
w
n
pushdown
pushdown操作是将三种懒标记下传的操作。这里需要注意两个问题:
1、每种标记如何下传?
2、三种标记之间下传的优先级问题。
(1)每种标记如何下传?
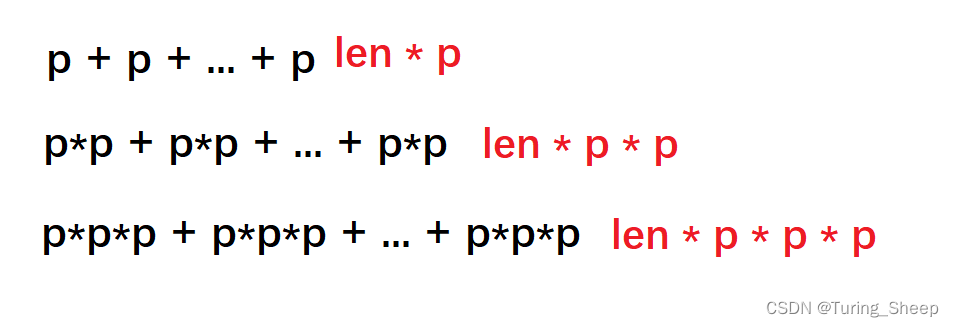
赋值
赋值公式如下图所示:
l
e
n
=
r
−
l
+
1
len = r - l + 1
len=r−l+1
另外需要注意在计算过程中进行取模。
乘法
如下图所示:
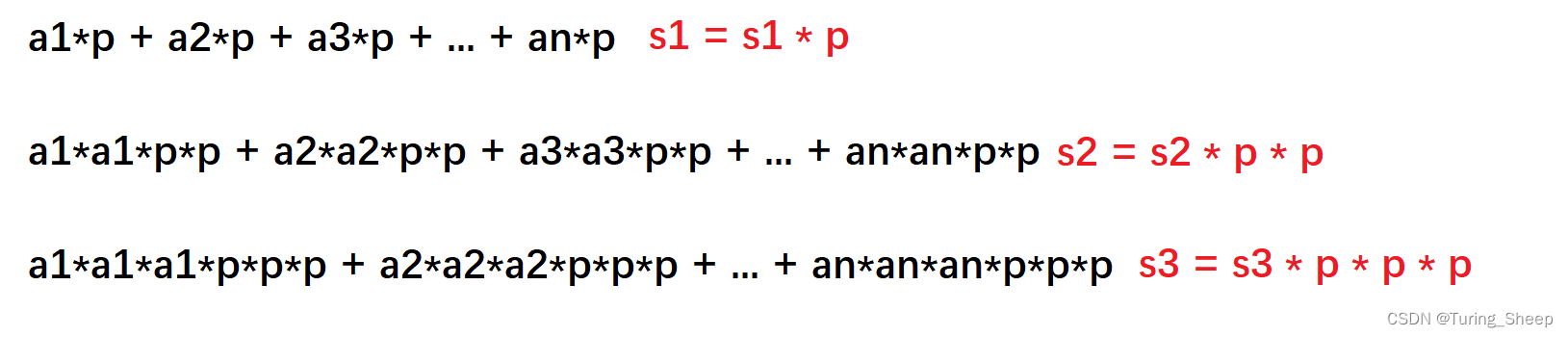
提取公因式即可。
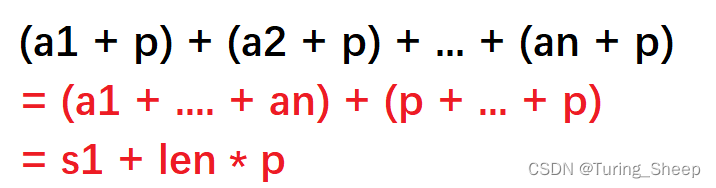
加法
加法是最难处理的,分类讨论一下。
先说一次方。
再说二次方

最后说三次方

(2)三种标记下传的优先级问题
对于某一个区间而言,三种操作可能同时出现。当出现赋值操作的时候,说明在此操作之前出现的加、乘都没有用了,因为都被当前的赋值操作覆盖掉了。所以我们最先考虑的是赋值操作。
如果该区间没有赋值操作,我们考虑的就是乘法操作,乘法出现的时候,说明在此次操作之前的加法操作的数值p也同样需要翻对应的倍数。
最后我们考虑加法。
综合上述讨论,我们可以写出下面的函数实现:
另外我们需要注意,在下传的过程中,我们要将左右区间的标记转化到对应的数值上。
void pushdown(int u)
{
auto &root = tre[u], &left = tre[lson], &right = tre[rson];
if(root.tag_3)
{
int c = root.tag_3;
int len1 = (left.r - left.l + 1);
left.sum1 = len1 * c % mod;
left.sum2 = len1 * c * c % mod;
left.sum3 = len1 * c % mod * c % mod * c % mod;
int len2 = (right.r - right.l + 1);
right.sum1 = len2 * c % mod;
right.sum2 = len2 * c * c % mod;
right.sum3 = len2 * c * c * c % mod;
left.tag_3 = right.tag_3 = c;
left.tag_1 = right.tag_1 = 0;
left.tag_2 = right.tag_2 = 1;
root.tag_3 = 0;
}
if(root.tag_2 != 1)
{
int c = root.tag_2;
left.sum1 = left.sum1 * c % mod;
left.sum2 = left.sum2 * c * c % mod;
left.sum3 = left.sum3 * c * c * c % mod;
right.sum1 = right.sum1 * c % mod;
right.sum2 = right.sum2 * c * c % mod;
right.sum3 = right.sum3 * c * c * c % mod;
right.tag_2 = c * right.tag_2 % mod;
left.tag_2 = c * left.tag_2 % mod;
right.tag_1 = c * right.tag_1 % mod;
left.tag_1 = c * left.tag_1 % mod;
root.tag_2 = 1;
}
if(root.tag_1)
{
int c = root.tag_1;
int s1 = left.sum1;
int s2 = left.sum2;
int len1 = left.r - left.l + 1;
left.sum1 = (left.sum1 + len1 * c) % mod;
left.sum2 = (left.sum2 + 2 * s1 * c + len1 * c * c) % mod;
left.sum3 = (left.sum3 + 3 * c * s2 + 3 * s1 * c * c + len1 * c * c * c) % mod;
s1 = right.sum1;
s2 = right.sum2;
int len2 = right.r - right.l + 1;
right.sum1 = (right.sum1 + len2 * c) % mod;
right.sum2 = (right.sum2 + 2 * s1 * c + len2 * c * c % mod) % mod;
right.sum3 = (right.sum3 + 3 * c * s2 % mod + 3 * s1 * c * c % mod + len2 * c % mod * c % mod * c % mod ) % mod;
left.tag_1 = (c + left.tag_1) % mod;
right.tag_1 = (c + right.tag_1) % mod;
root.tag_1 = 0;
}
}
以上就是这道题所有的难点,剩下的函数操作就比较常规了。大家直接看代码实现即可。
三、代码
#include<bits/stdc++.h>
#define endl '\n'
#define INF 0x3f3f3f3f
#define lson u << 1
#define rson u << 1 | 1
#define int long long
using namespace std;
typedef long long ll;
typedef pair<int,int> pii;
const int N = 1e5 + 10;
const int mod = 1e4 + 7;
int n, m;
struct Node
{
int l, r;
int sum1, sum2, sum3;
int tag_1, tag_2, tag_3;
}tre[N * 4];
void pushup(int u)
{
tre[u].sum1 = (tre[lson].sum1 + tre[rson].sum1) % mod;
tre[u].sum2 = (tre[lson].sum2 + tre[rson].sum2) % mod;
tre[u].sum3 = (tre[lson].sum3 + tre[rson].sum3) % mod;
}
void pushdown(int u)
{
auto &root = tre[u], &left = tre[lson], &right = tre[rson];
if(root.tag_3)
{
int c = root.tag_3;
int len1 = (left.r - left.l + 1);
left.sum1 = len1 * c % mod;
left.sum2 = len1 * c * c % mod;
left.sum3 = len1 * c % mod * c % mod * c % mod;
int len2 = (right.r - right.l + 1);
right.sum1 = len2 * c % mod;
right.sum2 = len2 * c * c % mod;
right.sum3 = len2 * c * c * c % mod;
left.tag_3 = right.tag_3 = c;
left.tag_1 = right.tag_1 = 0;
left.tag_2 = right.tag_2 = 1;
root.tag_3 = 0;
}
if(root.tag_2 != 1)
{
int c = root.tag_2;
left.sum1 = left.sum1 * c % mod;
left.sum2 = left.sum2 * c * c % mod;
left.sum3 = left.sum3 * c * c * c % mod;
right.sum1 = right.sum1 * c % mod;
right.sum2 = right.sum2 * c * c % mod;
right.sum3 = right.sum3 * c * c * c % mod;
right.tag_2 = c * right.tag_2 % mod;
left.tag_2 = c * left.tag_2 % mod;
right.tag_1 = c * right.tag_1 % mod;
left.tag_1 = c * left.tag_1 % mod;
root.tag_2 = 1;
}
if(root.tag_1)
{
int c = root.tag_1;
int s1 = left.sum1;
int s2 = left.sum2;
int len1 = left.r - left.l + 1;
left.sum1 = (left.sum1 + len1 * c) % mod;
left.sum2 = (left.sum2 + 2 * s1 * c + len1 * c * c) % mod;
left.sum3 = (left.sum3 + 3 * c * s2 + 3 * s1 * c * c + len1 * c * c * c) % mod;
s1 = right.sum1;
s2 = right.sum2;
int len2 = right.r - right.l + 1;
right.sum1 = (right.sum1 + len2 * c) % mod;
right.sum2 = (right.sum2 + 2 * s1 * c + len2 * c * c % mod) % mod;
right.sum3 = (right.sum3 + 3 * c * s2 % mod + 3 * s1 * c * c % mod + len2 * c % mod * c % mod * c % mod ) % mod;
left.tag_1 = (c + left.tag_1) % mod;
right.tag_1 = (c + right.tag_1) % mod;
root.tag_1 = 0;
}
}
void build(int u, int l, int r)
{
if(l == r)
{
tre[u] = {l, r};
tre[u].tag_2 = 1;
return;
}
int mid = l + r >> 1;
tre[u] = {l, r};
tre[u].tag_2 = 1;
build(lson, l, mid);
build(rson, mid + 1, r);
}
void modify(int u, int l, int r, int c, int op)
{
if(tre[u].l >= l && tre[u].r <= r)
{
auto &root = tre[u];
if(op == 1)
{
int s1 = root.sum1;
int s2 = root.sum2;
root.sum1 = (root.sum1 + (root.r - root.l + 1) * c) % mod;
root.sum2 = (root.sum2 + 2 * s1 * c % mod + (root.r - root.l + 1) * c % mod * c % mod) % mod;
root.sum3 = (root.sum3 + 3 * c * s2 % mod + 3 * s1 * c * c % mod + (root.r - root.l + 1) * c % mod * c * c % mod ) % mod;
root.tag_1 = (c + root.tag_1) % mod;
}
else if(op == 2)
{
root.sum1 = root.sum1 * c % mod;
root.sum2 = root.sum2 * c * c % mod;
root.sum3 = root.sum3 * c % mod * c % mod * c % mod;
root.tag_2 = c * root.tag_2 % mod;
root.tag_1 = c * root.tag_1 % mod;
}
else
{
root.sum1 = (root.r - root.l + 1) * c % mod;
root.sum2 = (root.r - root.l + 1) * c * c % mod;
root.sum3 = (root.r - root.l + 1) * c % mod * c % mod * c % mod;
root.tag_3 = c;
root.tag_1 = 0;
root.tag_2 = 1;
}
return;
}
pushdown(u);
int mid = tre[u].l + tre[u].r >> 1;
if(l <= mid)
modify(lson, l, r, c, op);
if(r > mid)
modify(rson, l, r, c, op);
pushup(u);
}
int query(int u, int l, int r, int op)
{
if(tre[u].l >= l && tre[u].r <= r)
{
if(op == 1)
return tre[u].sum1;
else if(op == 2)
return tre[u].sum2;
else
return tre[u].sum3;
}
int mid = tre[u].l + tre[u].r >> 1;
int res = 0;
pushdown(u);
if(l <= mid)
res = (res + query(lson, l, r, op)) % mod;
if(r > mid)
res = (res + query(rson, l, r, op)) % mod;
return res;
}
void solve()
{
while(cin >> n >> m, n || m)
{
memset(tre, 0, sizeof tre);
build(1, 1, n);
while(m--)
{
int opt, l, r, c;
cin >> opt >> l >> r >> c;
if(opt != 4)
modify(1, l, r, c, opt);
else
cout << query(1, l, r, c) << endl;
}
}
}
signed main()
{
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
solve();
}