旋转矩阵的作用:世界坐标变换;求解局部坐标系下的局部坐标
- 1、旋转矩阵代表了一个局部坐标系
- 2、世界坐标变换
- 3、求解局部坐标系下的局部坐标
1、旋转矩阵代表了一个局部坐标系
以下数据以平面直角坐标系为例,三维空间同理
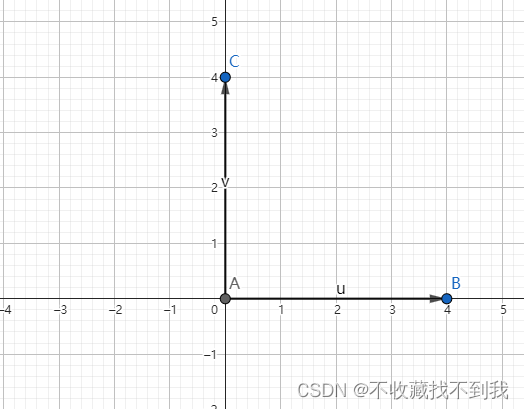
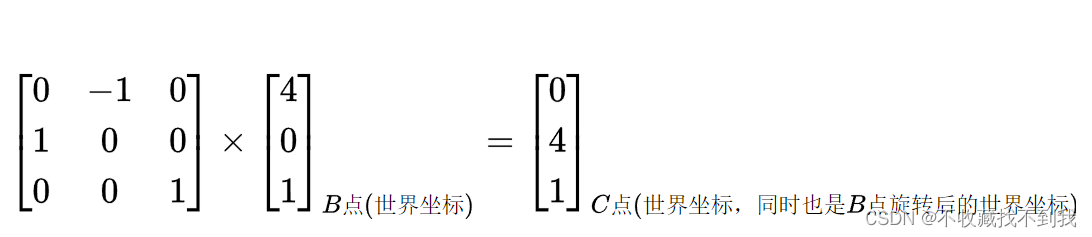
上图中,B点为旋转前的点,C点为B点旋转后的对应点(逆时针旋转90°),对应的旋转矩阵为:
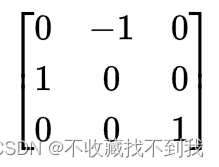
对坐标轴做相同旋转:
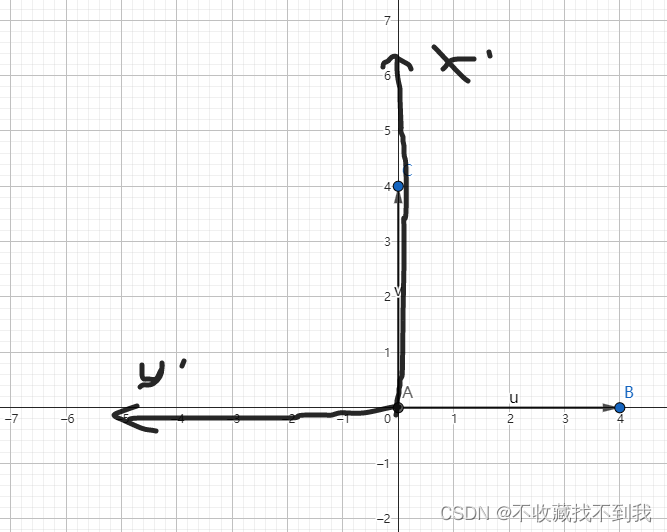
我们再对比下旋转矩阵,可以发现旋转后的坐标轴可以在旋转矩阵中找到,其实这个旋转矩阵也表示了一个坐标系,相对于原有的坐标系(世界坐标系),该坐标系为局部坐标系,该坐标系的x轴方向为(0,1),y轴方向为(-1,0),原点为(0,0)。也可以将旋转矩阵视为:
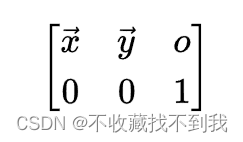
x向量表示为x轴方向,y向量表示y轴方向,o表示原点
2、世界坐标变换
3、求解局部坐标系下的局部坐标
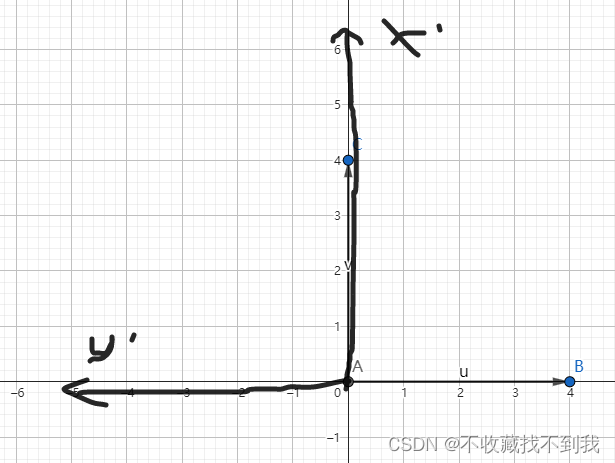
再上图中,我们可以发现C点在x’oy’坐标系(局部坐标系)中的局部坐标为(4,0);
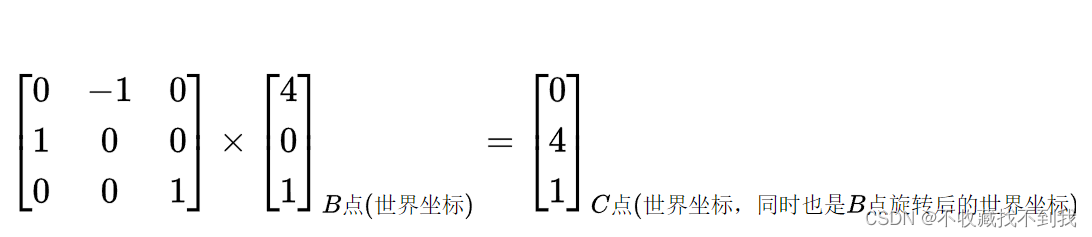
在比较下这个图片中B点的坐标,可以发现B点的世界坐标也可以理解为C点在局部坐标系的局部坐标,即:
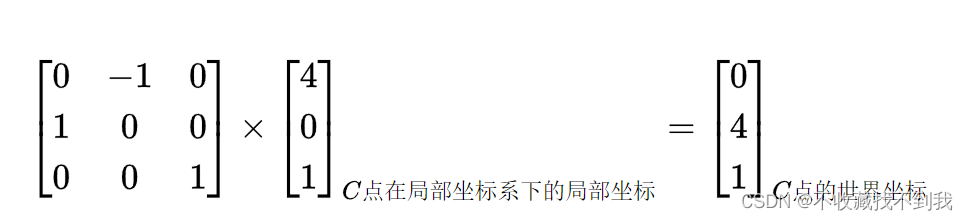
而这个局部坐标系就是旋转矩阵本身,所以我们在已知一点P的世界坐标及旋转矩阵(或局部坐标系)的情况下就可以反求出P点在该局部坐标系下的局部坐标,公式为: