中国电子学会嵌入式系统与机器人分会主任委员、北京航空航天大学机器人研究所名誉所长、中关村智友研究院院长王田苗博士出席大会闭幕式,并现场发布《机器人十大前沿热点领域(2022-2023)》。归纳出2022-2023年机器人十大前沿技术;并结合我国国情和机器人产业发展现状,提出了2022-2023年十大机器人应用热点产品。

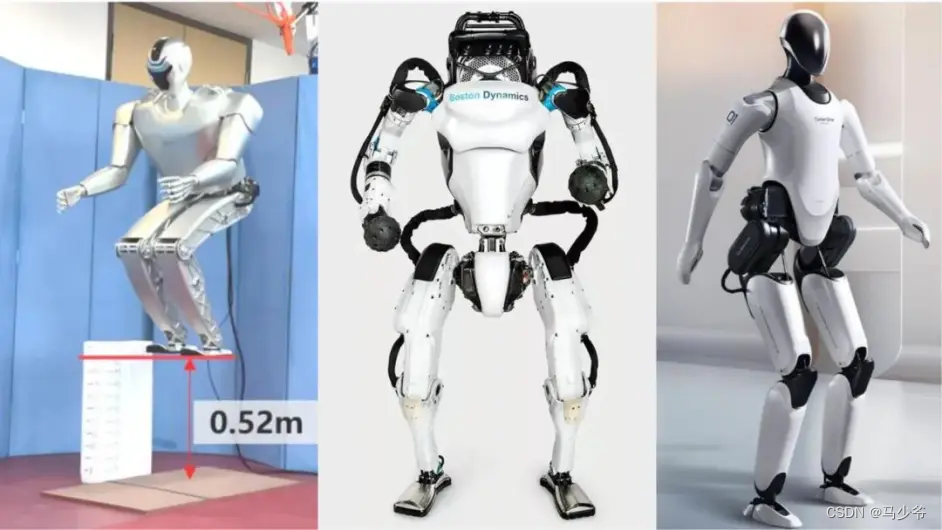
1.仿人机器人技术
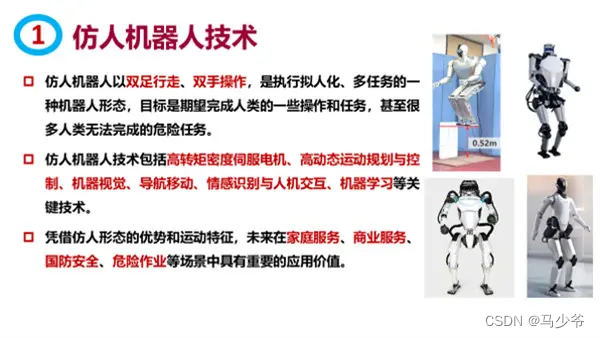
仿人机器人以双足行走、双手操作,是执行拟人化、多任务的一种机器人形态,目标是期望完成人类的一些操作和任务,甚至很多人类无法完成的危险任务。
仿人机器人技术包括高转矩密度伺服电机、高动态运动规划与控制、机器视觉、导航移动、情感识别与人机交互、机器学习等关键技术。
凭借仿人形态的优势和运动特征,未来在家庭服务、商业服务、国防安全、危险作业等场景中具有重要的应用价值。
2.自然语言理解、情感识别与人机交互技术
自然语言理解通过对人类语音、肢体等方面意图识别,生成相应的回答或动作指令。在引擎搜索、智能推荐、机器人交互等场景具有广泛的应用。
情感识别是对自然语言理解技术的进一步升级,利用图像识别、语音识别、大数据等技术实现对人类情感的有效识别。在教育娱乐、医疗康复等领域具有重要应用。
自然语言理解和情感识别是人机交互领域中的重要组成部分。伴随着人机共融、数字孪生、元宇宙等前沿科技的发展与需求,人机交互技术是未来数字时代的重要接口之一。
3.软体机器人与人工肌肉
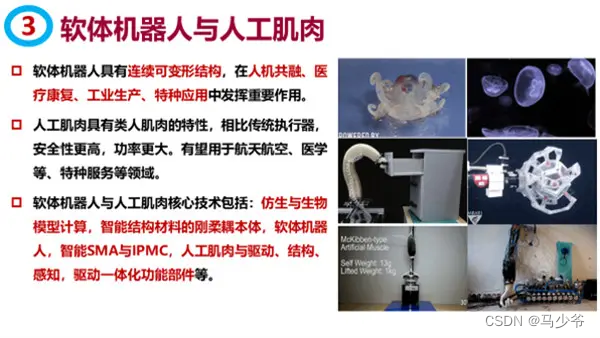
软体机器人具有连续可变形结构,在人机共融、医疗康复、工业生产、特种应用中发挥重要作用。
人工肌肉具有类人肌肉的特性,相比传统执行器,安全性更高,功率更大。有望用于航天航空、医学等、特种服务等领域。
软体机器人与人工肌肉核心技术包括:仿生与生物模型计算,智能结构材料的刚柔耦本体,软体机器人,智能SMA与IPMC,人工肌肉与驱动、结构、感知,驱动一体化功能部件等。
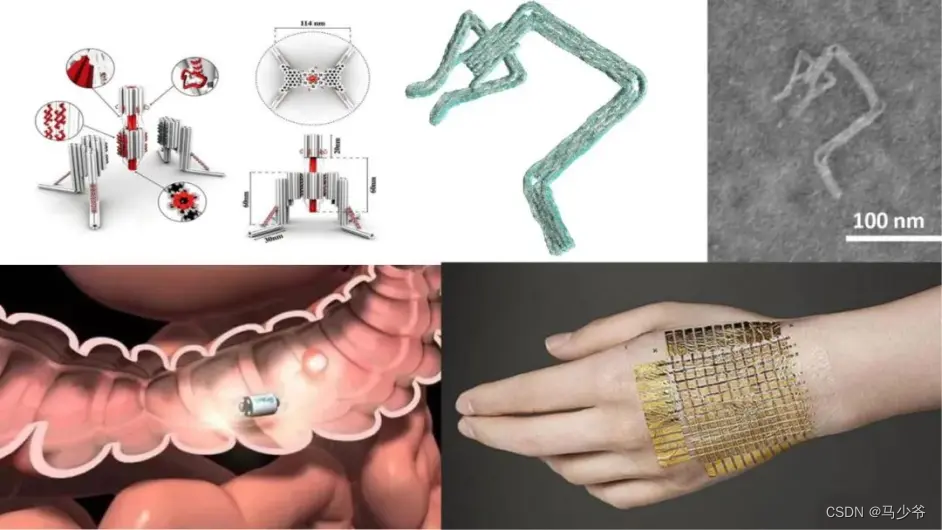
4.DNA纳米机器人与新材料微纳部件
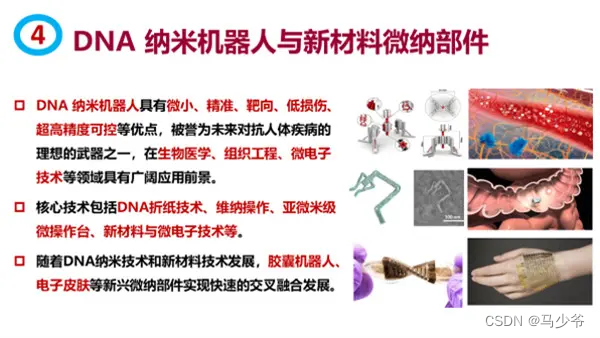
DNA纳米机器人具有微小、精准、靶向、低损伤、超高精度可控等优点,被誉为未来对抗人体疾病的理想的武器之一,在生物医学、组织工程、微电子技术等领域具有广阔应用前景。
核心技术包括DNA折纸技术、维纳操作、亚微米级微操作台、新材料与微电子技术等。
随着DNA纳米技术和新材料技术发展,胶囊机器人、电子皮肤等新兴微纳部件实现快速的交叉融合发展。
5.元宇宙与机器人融合技术
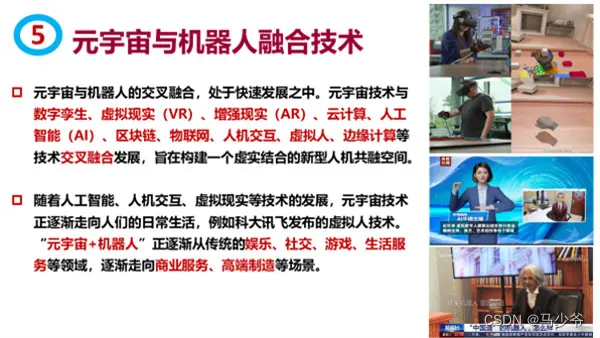
元宇宙与机器人的交叉融合,处于快速发展之中。元宇宙技术与数字孪生、虚拟现实(VR)、增强现实(AR)、云计算、人工智能(AI)、区块链、物联网、人机交互、虚拟人、边缘计算等技术交叉融合发展,旨在构建一个虚实结合的新型人机共融空间。
随着人工智能、人机交互、虚拟现实等技术的发展,元宇宙技术正逐渐走向人们的日常生活,例如科大讯飞发布的虚拟人技术。“元宇宙+机器人”正逐渐从传统的娱乐、社交、游戏、生活服务等领域,逐渐走向商业服务、高端制造等场景。

6.脑机接口与生机电一体化技术
脑机接口是在人或动物大脑与外部设备之间创建的直接连接,从而实现脑与设备的信息交换。
基于脑机接口的机器人是前沿科技之一,将机器人与脑认知交叉融合创新,在医疗领域、航空航天、教育、娱乐等多个领域,脑机接口技术将得到更广泛的应用,发展前景值得期待。
生机电一体化是近年来快速发展的前沿科学技术,通过建立神经信息测量处理与人机信息通道,与机器人交叉融合发展,作为典型的生机电一体化系统, 智能假肢,将假肢本体的机电集成、双向生机接口集成、假肢与生机接口的物理和功能集成进行融合。
7.复合机器人技术——“手足眼脑”一体化
复合机器人由移动平台、 机械臂、 视觉模组、 末端执行器等组成,集成了移动机器人与操作机功能,融合环境感知、 定位与导航等技术,可快速布局于智慧工厂与自动化车间、 电力巡检、 仓储分拣、 自动化货仓等场景, 满足柔性生产需求,是促进制造业转型升级的关键核心装备之一。
将围绕机器人环境感知、定位导航、工业视觉检测、一体化控制、精准抓取与操作等进行关键技术的攻关,实现核心技术和零部件的自主可控。
复合机器人作为一个整体,在复杂环境中,涉及到手足的柔顺阻抗,以及全身动力学控制技术。基于应用场景和底层模块,复合机器人将在“脑、眼、手、脚”技术上走向协同。
高精度导航传感器、视觉传感器、机器人操作系统及算法等核心软硬件技术取得关键突破,实现核心技术自主化、产品国产化。

8.机器人操作系统
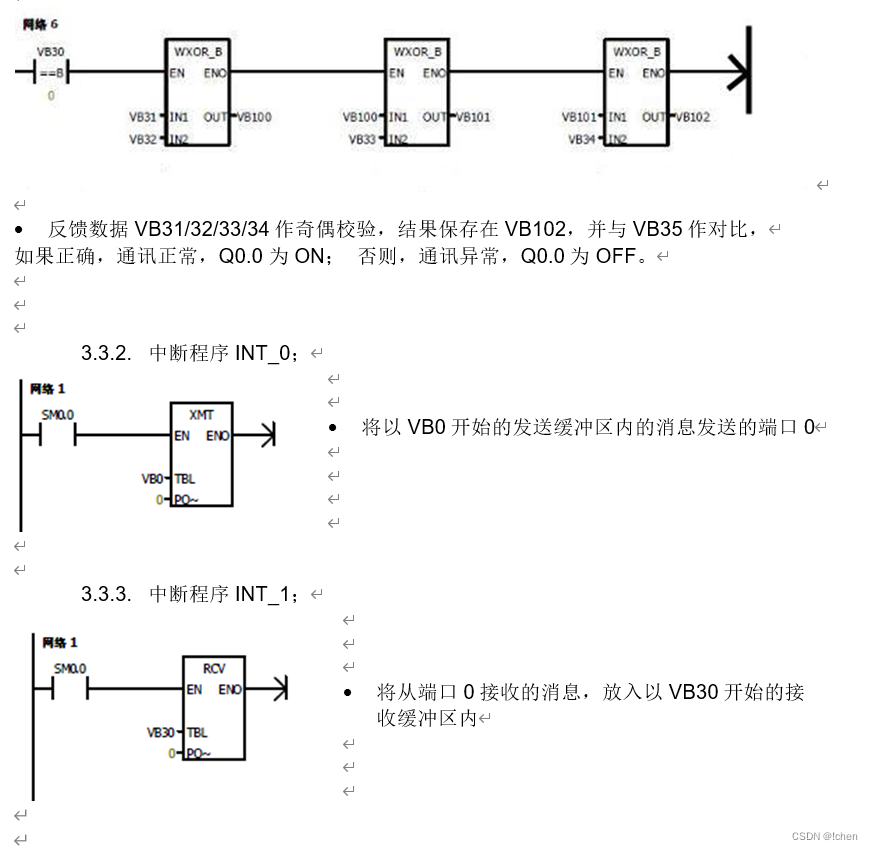
机器人操作系统通常包括硬件抽象、底层设备控制、常用功能实现、进程间消息以及数据包管理等功能。
根据不同的行业需求,具有不同类别的机器人操作系统。例如面向教育和科研的ROS机器人操作系统,面向服务机器人的达闼海睿操作系统,面向无人驾驶的百度阿波罗、智行者Idriverbrain操作系统等。
随着机器人操作系统的快速发展,有望使更多机器人走向标准化和模块化,使机器人建立物理空间+数字空间的数字孪生成为现实;并促使机器人实现更大规模的落地。

9.云服务机器人技术
将机器人的大脑部署到云端,借助云端服务器,可实现更大的运算能力,实现更高效的数据应用。云服务机器人核心技术包含云计算、分布式计算、RPA/AIops软件自动化工具、数据储存与管理、机器人运动控制等方面。未来在无人驾驶、商业服务等数据密集型场景,具有广阔的应用前景。
通过云服务机器人的功能化模块和数据中心,可缩短机器人的开发周期、开发难度,同时便于后期的远程维护和状态监测。未来开发针对相关应用场景的“云端大脑+本地机器人”或“云端服务”类型机器人,有望成为机器人规模化推广和应用的重要模式之一。

10.机器人伦理与安全
机器人三原则:
① 机器人不得伤害人类,或看到人类受到伤害而袖手旁观
② 机器人必须服从人类的命令,除非这条命令与第一条相矛盾
③ 机器人必须保护自己,除非这种保护与以上两条相矛盾
机器人技术作为一项快速发展中的新兴技术,部分技术和系统处于发展和迭代过程中,存在一定的安全隐患。同时,机器人在进行替代人做出很多决策行为时,同样需要遵从人类社会的各项规则。
人工智能和机器人技术的发展,将一些生活中的伦理性问题在系统中规则化。
机器人网络安全问题逐渐引起相关部门、供应商、用户等方面的重视,预防发生重要数据泄露、生产线瘫痪、机器人误操作等网络安全问题的发生。