机器学习笔记之流形模型——标准流模型基本介绍
- 引言
- 回顾:隐变量模型的缺陷
- 标准流( Normalizing Flow \text{Normalizing Flow} Normalizing Flow)思想
- 分布变换的推导过程
引言
本节将介绍概率生成模型——标准流模型( Normalizing Flow \text{Normalizing Flow} Normalizing Flow)。
回顾:隐变量模型的缺陷
关于隐变量模型(
Latent Variable Model,LVM
\text{Latent Variable Model,LVM}
Latent Variable Model,LVM),如果表示隐变量的随机变量集合
Z
\mathcal Z
Z足够复杂的话,很容易出现积分难问题:
此时隐变量
Z
\mathcal Z
Z的维度(随机变量个数)极高
(
M
)
(\mathcal M)
(M),对
Z
\mathcal Z
Z求解积分的代价是极大的
(
Intractable
)
(\text{Intractable})
(Intractable).
P
(
X
)
⏟
Intractable
=
∫
Z
P
(
Z
,
X
)
d
Z
=
∫
Z
P
(
Z
)
⋅
P
(
X
∣
Z
)
d
Z
=
∫
Z
1
⋯
∫
Z
M
P
(
Z
1
,
⋯
,
Z
M
)
⋅
P
(
X
∣
Z
1
,
⋯
,
Z
M
)
d
Z
1
,
⋯
,
Z
M
\begin{aligned} \underbrace{\mathcal P(\mathcal X) }_{\text{Intractable}} & = \int_{\mathcal Z} \mathcal P(\mathcal Z,\mathcal X) d\mathcal Z \\ & = \int_{\mathcal Z} \mathcal P(\mathcal Z) \cdot \mathcal P(\mathcal X \mid \mathcal Z) d\mathcal Z \\ & = \int_{\mathcal Z_1} \cdots \int_{\mathcal Z_{\mathcal M}} \mathcal P(\mathcal Z_1,\cdots,\mathcal Z_{\mathcal M}) \cdot \mathcal P(\mathcal X \mid \mathcal Z_1,\cdots,\mathcal Z_{\mathcal M}) d\mathcal Z_1,\cdots,\mathcal Z_{\mathcal M} \end{aligned}
Intractable
P(X)=∫ZP(Z,X)dZ=∫ZP(Z)⋅P(X∣Z)dZ=∫Z1⋯∫ZMP(Z1,⋯,ZM)⋅P(X∣Z1,⋯,ZM)dZ1,⋯,ZM
从而,关于隐变量
Z
\mathcal Z
Z的后验概率
P
(
Z
∣
X
)
\mathcal P(\mathcal Z \mid \mathcal X)
P(Z∣X)也同样是极难求解的:
P
(
Z
∣
X
)
⏟
Intractable
=
P
(
Z
,
X
)
P
(
X
)
=
P
(
Z
)
⋅
P
(
X
∣
Z
)
P
(
X
)
⏟
Intractable
\begin{aligned} \underbrace{\mathcal P(\mathcal Z \mid \mathcal X)}_{\text{Intractable}} & = \frac{\mathcal P(\mathcal Z,\mathcal X)}{\mathcal P(\mathcal X)} \\ & = \frac{\mathcal P(\mathcal Z) \cdot \mathcal P(\mathcal X \mid \mathcal Z)}{\underbrace{\mathcal P(\mathcal X)}_{\text{Intractable}}} \end{aligned}
Intractable
P(Z∣X)=P(X)P(Z,X)=Intractable
P(X)P(Z)⋅P(X∣Z)
针对这种问题,由于无法得到精确解/精确解计算代价极高,因而通常采用近似推断( Approximate Inference \text{Approximate Inference} Approximate Inference)的方式对 P ( Z ∣ X ) \mathcal P(\mathcal Z \mid \mathcal X) P(Z∣X)近似求解。
例如变分自编码器(
Variational Auto-Encoder,VAE
\text{Variational Auto-Encoder,VAE}
Variational Auto-Encoder,VAE),它的底层逻辑是使用重参数化技巧将人为设定分布
Q
(
Z
∣
X
)
\mathcal Q(\mathcal Z \mid \mathcal X)
Q(Z∣X)视作关于参数
ϕ
\phi
ϕ的函数
Q
(
Z
∣
X
,
ϕ
)
\mathcal Q(\mathcal Z \mid \mathcal X,\phi)
Q(Z∣X,ϕ),并通过神经网络学习参数
ϕ
\phi
ϕ并使其近似
P
(
Z
∣
X
)
\mathcal P(\mathcal Z \mid \mathcal X)
P(Z∣X)。关于变分自编码器的模型结构表示如下:
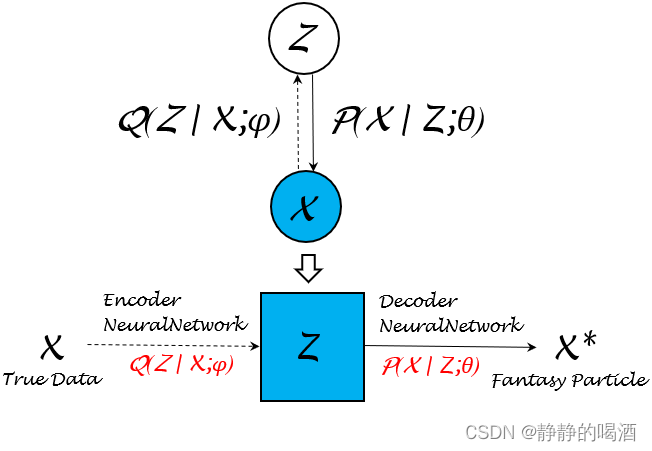
关于编码器(
Encoder
\text{Encoder}
Encoder)函数
Q
(
Z
∣
X
;
ϕ
)
\mathcal Q(\mathcal Z \mid \mathcal X;\phi)
Q(Z∣X;ϕ)与解码器(
Decoder
\text{Decoder}
Decoder)函数
P
(
X
∣
Z
;
θ
)
\mathcal P(\mathcal X \mid \mathcal Z;\theta)
P(X∣Z;θ),变分自编码器的目标函数表示如下:
一个有趣的现象:其中
−
KL
[
Q
(
Z
∣
X
;
ϕ
)
∣
∣
P
(
Z
;
θ
(
t
)
)
]
- \text{KL} [\mathcal Q(\mathcal Z \mid \mathcal X;\phi) || \mathcal P(\mathcal Z ;\theta^{(t)})]
−KL[Q(Z∣X;ϕ)∣∣P(Z;θ(t))]只是一个关于
ϕ
\phi
ϕ的惩罚项(约束),并且这个约束直接作用于
E
Q
(
Z
∣
X
;
ϕ
)
[
log
P
(
X
∣
Z
;
θ
)
]
\mathbb E_{\mathcal Q(\mathcal Z \mid \mathcal X;\phi)} \left[\log \mathcal P(\mathcal X \mid \mathcal Z;\theta)\right]
EQ(Z∣X;ϕ)[logP(X∣Z;θ)].因此真正迭代的只有参数
θ
(
θ
(
t
)
⇒
θ
(
t
+
1
)
)
\theta(\theta^{(t)}\Rightarrow \theta^{(t+1)})
θ(θ(t)⇒θ(t+1)),参数
ϕ
\phi
ϕ仅是迭代过程中伴随着
θ
\theta
θ的更新而更新。
{
L
(
ϕ
,
θ
,
θ
(
t
)
)
=
E
Q
(
Z
∣
X
;
ϕ
)
[
log
P
(
X
∣
Z
;
θ
)
]
−
KL
[
Q
(
Z
∣
X
;
ϕ
)
∣
∣
P
(
Z
;
θ
(
t
)
)
]
(
θ
^
(
t
+
1
)
,
ϕ
^
(
t
+
1
)
)
=
arg
max
θ
,
ϕ
L
(
ϕ
,
θ
,
θ
(
t
)
)
\begin{cases} \mathcal L(\phi,\theta,\theta^{(t)}) = \mathbb E_{\mathcal Q(\mathcal Z \mid \mathcal X;\phi)} \left[\log \mathcal P(\mathcal X \mid \mathcal Z;\theta)\right] - \text{KL} [\mathcal Q(\mathcal Z \mid \mathcal X;\phi) || \mathcal P(\mathcal Z;\theta^{(t)})] \\ \quad \\ (\hat {\theta}^{(t+1)},\hat {\phi}^{(t+1)}) = \mathop{\arg\max}\limits_{\theta,\phi} \mathcal L(\phi,\theta,\theta^{(t)}) \end{cases}
⎩
⎨
⎧L(ϕ,θ,θ(t))=EQ(Z∣X;ϕ)[logP(X∣Z;θ)]−KL[Q(Z∣X;ϕ)∣∣P(Z;θ(t))](θ^(t+1),ϕ^(t+1))=θ,ϕargmaxL(ϕ,θ,θ(t))
关于目标函数
L
(
ϕ
,
θ
,
θ
(
t
)
)
\mathcal L(\phi,\theta,\theta^{(t)})
L(ϕ,θ,θ(t))的底层逻辑是最大化
ELBO
\text{ELBO}
ELBO:
(
θ
^
(
t
+
1
)
,
ϕ
^
(
t
+
1
)
)
=
arg
max
θ
,
ϕ
{
E
Q
(
Z
∣
X
;
ϕ
)
[
log
P
(
X
,
Z
;
θ
)
Q
(
Z
∣
X
;
ϕ
)
]
}
(\hat {\theta}^{(t+1)},\hat {\phi}^{(t+1)}) = \mathop{\arg\max}\limits_{\theta,\phi} \left\{\mathbb E_{\mathcal Q(\mathcal Z \mid \mathcal X;\phi)} \left[\log \frac{\mathcal P(\mathcal X,\mathcal Z;\theta)}{\mathcal Q(\mathcal Z \mid \mathcal X;\phi)}\right]\right\}
(θ^(t+1),ϕ^(t+1))=θ,ϕargmax{EQ(Z∣X;ϕ)[logQ(Z∣X;ϕ)P(X,Z;θ)]}
也就是说,它仅仅是最大化了极大似然估计
log
P
(
X
;
θ
)
\log \mathcal P(\mathcal X;\theta)
logP(X;θ)的下界。实际上,它并没有直接对对数似然函数求解最优化问题。
这不可避免地存在误差,毕竟最优化对数似然函数和最优化它的下界 是两个概念。这一切的核心问题均在于 P ( X ) \mathcal P(\mathcal X) P(X)无法得到精确解。
如果存在一种模型,它在学习任务过程中, P ( X ) \mathcal P(\mathcal X) P(X)是可求解的( tractable \text{tractable} tractable),自然不会出现上述一系列的近似操作了。
标准流( Normalizing Flow \text{Normalizing Flow} Normalizing Flow)思想
关于样本 X \mathcal X X的概率分布 P ( X ) \mathcal P(\mathcal X) P(X),它可能是复杂的。但流模型( Flow-based Model \text{Flow-based Model} Flow-based Model)的思想是:分布 P ( X ) \mathcal P(\mathcal X) P(X)的复杂并不是一蹴而就的,而是通过若干次的变化而产生出的复杂结果。
关于流模型的概率图结构可表示为如下形式:
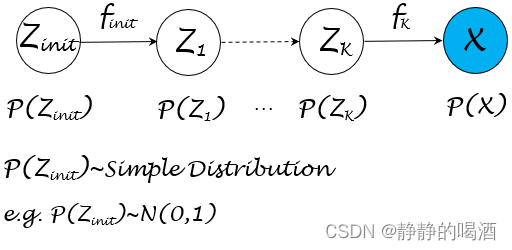
从模型结构中可以观察到,既然分布
P
(
X
)
\mathcal P(\mathcal X)
P(X)比较复杂,那么可以构建隐变量
Z
\mathcal Z
Z与
X
\mathcal X
X之间的函数关系
X
=
f
(
Z
)
\mathcal X = f(\mathcal Z)
X=f(Z),从而通过换元的方式描述
P
(
Z
)
\mathcal P(\mathcal Z)
P(Z)与
P
(
X
)
\mathcal P(\mathcal X)
P(X)的函数关系。
如果隐变量 Z \mathcal Z Z的结构同样复杂,可以继续针对该隐变量创造新的隐变量并构建函数关系。以此类推,最终可以通过一组服从简单分布的随机变量 Z i n i t \mathcal Z_{init} Zinit通过若干次的函数的嵌套表示,得到关于 X \mathcal X X的关联关系,从而得到 P i n i t ( Z i n i t ) ⇒ P ( X ) \mathcal P_{init}(\mathcal Z_{init}) \Rightarrow \mathcal P(\mathcal X) Pinit(Zinit)⇒P(X)的函数关系。
分布变换的推导过程
以上图中隐变量
Z
K
\mathcal Z_{\mathcal K}
ZK和观测变量
X
\mathcal X
X之间关联关系示例:
- 创建假设:
f
K
f_{\mathcal K}
fK是一个 连续、可逆 函数,满足
X
=
f
K
(
Z
K
)
\mathcal X = f_{\mathcal K}(\mathcal Z_{\mathcal K})
X=fK(ZK)。其中
Z
K
,
X
\mathcal Z_{\mathcal K},\mathcal X
ZK,X均表示随机变量集合,并服从对应的概率分布:
其中P X ( X ) \mathcal P_{\mathcal X}(\mathcal X) PX(X)表示关于X \mathcal X X的概率分布,并且变量是X . Z K \mathcal X.\mathcal Z_{\mathcal K} X.ZK对应分布同理。反过来,由于f K f_{\mathcal K} fK函数可逆,因而有:Z K = f K − 1 ( X ) \mathcal Z_{\mathcal K} = f_{\mathcal K}^{-1}(\mathcal X) ZK=fK−1(X).
Z K ∼ P Z K ( Z K ) , X ∼ P X ( X ) ; Z K , X ∈ R p \mathcal Z_{\mathcal K} \sim \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}),\mathcal X \sim \mathcal P_{\mathcal X}(\mathcal X);\quad \mathcal Z_{\mathcal K},\mathcal X \in \mathbb R^p ZK∼PZK(ZK),X∼PX(X);ZK,X∈Rp
- 不可否认的是,无论是
P
Z
K
(
Z
K
)
\mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K})
PZK(ZK)还是
P
X
(
X
)
\mathcal P_{\mathcal X}(\mathcal X)
PX(X),它们都是概率分布。根据概率密度积分的定义,必然有:
∫ Z K P Z K ( Z K ) d Z K = ∫ X P X ( X ) d X = 1 \int_{\mathcal Z_{\mathcal K}} \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) d\mathcal Z_{\mathcal K} = \int_{\mathcal X} \mathcal P_{\mathcal X}(\mathcal X) d\mathcal X =1 ∫ZKPZK(ZK)dZK=∫XPX(X)dX=1
从而有:
在变分推断——重参数化技巧一节中也使用这种描述进行换元,在不定积分中,P Z K ( Z K ) d Z K \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) d\mathcal Z_{\mathcal K} PZK(ZK)dZK和P X ( X ) d X \mathcal P_{\mathcal X}(\mathcal X)d \mathcal X PX(X)dX必然相等;但是在定积分中,Z K , X \mathcal Z_{\mathcal K},\mathcal X ZK,X位于不同的特征空间,对应的积分值(有正有负)存在差异。因此需要加上‘模’符号。
∣ P Z K ( Z K ) d Z K ∣ = ∣ P X ( X ) d X ∣ |\mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) d\mathcal Z_{\mathcal K}| = |P_{\mathcal X}(\mathcal X) d\mathcal X| ∣PZK(ZK)dZK∣=∣PX(X)dX∣
但由于 P Z K ( Z K ) , P X ( X ) \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}),\mathcal P_{\mathcal X}(\mathcal X) PZK(ZK),PX(X)它们是概率密度函数,它们的实际结果表示概率值(恒正)。因此 ∣ P X ( X ) ∣ = P X ( X ) |\mathcal P_{\mathcal X}(\mathcal X)| = \mathcal P_{\mathcal X}(\mathcal X) ∣PX(X)∣=PX(X), P Z K ( Z K ) \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PZK(ZK)同理。经过移项,可将概率分布之间的关系表示为如下形式:
P X ( X ) = ∣ d Z K d X ∣ ⋅ P Z K ( Z K ) \mathcal P_{\mathcal X}(\mathcal X) = \left|\frac{d\mathcal Z_{\mathcal K}}{d\mathcal X}\right| \cdot \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PX(X)= dXdZK ⋅PZK(ZK)
将 Z K = f K − 1 ( X ) \mathcal Z_{\mathcal K} = f_{\mathcal K}^{-1}(\mathcal X) ZK=fK−1(X)代入,最终可得到如下形式:
P X ( X ) = ∣ ∂ f K − 1 ( X ) ∂ X ∣ ⋅ P Z K ( Z K ) \mathcal P_{\mathcal X}(\mathcal X) = \left|\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}\right| \cdot \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PX(X)= ∂X∂fK−1(X) ⋅PZK(ZK) - 观察系数项
∣
∂
f
K
−
1
(
X
)
∂
X
∣
\left|\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}\right|
∂X∂fK−1(X)
,它是一个标量、常数,但
∂
f
K
−
1
(
X
)
∂
X
\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial\mathcal X}
∂X∂fK−1(X)自身是一个矩阵:
该矩阵被称作雅可比矩阵 Jacobian \text{Jacobian} Jacobian
∂ f K − 1 ( X ) ∂ X = [ ∂ f K − 1 ( X 1 ) ∂ X 1 ∂ f K − 1 ( X 1 ) ∂ X 2 ⋯ ∂ f K − 1 ( X 1 ) ∂ X p ∂ f K − 1 ( X 2 ) ∂ X 1 ∂ f K − 1 ( X 2 ) ∂ X 2 ⋯ ∂ f K − 1 ( X 2 ) ∂ X p ⋮ ⋮ ⋱ ⋮ ∂ f K − 1 ( X p ) ∂ X 1 ∂ f K − 1 ( X p ) ∂ X 2 ⋯ ∂ f K − 1 ( X p ) ∂ X p ] p × p \frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X} = \begin{bmatrix} \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_1)}{\partial \mathcal X_1} & \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_1)}{\partial \mathcal X_2}& \cdots & \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_1)}{\partial \mathcal X_p} \\ \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_2)}{\partial \mathcal X_1} & \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_2)}{\partial \mathcal X_2} & \cdots & \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_2)}{\partial \mathcal X_p}\\ \vdots & \vdots & \ddots & \vdots\\ \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_p)}{\partial \mathcal X_1} & \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_p)}{\partial \mathcal X_2} & \cdots & \frac{\partial f_{\mathcal K}^{-1}(\mathcal X_p)}{\partial \mathcal X_p} \end{bmatrix}_{p \times p} ∂X∂fK−1(X)= ∂X1∂fK−1(X1)∂X1∂fK−1(X2)⋮∂X1∂fK−1(Xp)∂X2∂fK−1(X1)∂X2∂fK−1(X2)⋮∂X2∂fK−1(Xp)⋯⋯⋱⋯∂Xp∂fK−1(X1)∂Xp∂fK−1(X2)⋮∂Xp∂fK−1(Xp) p×p
那么 ∣ ∂ f K − 1 ( X ) ∂ X ∣ \left|\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}\right| ∂X∂fK−1(X) 实际上是与雅克比矩阵对应的雅克比行列式( Jacobian Determinant \text{Jacobian Determinant} Jacobian Determinant)的绝对值。使用 det [ ∂ f K − 1 ( X ) ∂ X ] \text{det}\left[\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}\right] det[∂X∂fK−1(X)]进行表示:
P X ( X ) = ∣ det [ ∂ f K − 1 ( X ) ∂ X ] ∣ ⋅ P Z K ( Z K ) \mathcal P_{\mathcal X}(\mathcal X) = \left|\text{det}\left[\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}\right]\right| \cdot \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PX(X)= det[∂X∂fK−1(X)] ⋅PZK(ZK) - 继续变换,观察
∂
f
K
−
1
(
X
)
∂
X
\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}
∂X∂fK−1(X),可以继续向下变换:
{ ∂ f K − 1 ( X ) ∂ X ⋅ ∂ f K ( Z K ) ∂ Z K = 1 ⇒ ∂ f K − 1 ( X ) ∂ X = [ ∂ f K ( Z K ) ∂ Z K ] − 1 ⇒ ∣ det [ ∂ f K − 1 ( X ) ∂ X ] ∣ = ∣ det [ ∂ f K ( Z K ) ∂ Z K ] ∣ − 1 \begin{cases} \frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X} \cdot \frac{\partial f_{\mathcal K}(\mathcal Z_{\mathcal K})}{\partial \mathcal Z_{\mathcal K}} = 1 \Rightarrow \frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X} = \left[\frac{\partial f_{\mathcal K}(\mathcal Z_{\mathcal K})}{\partial \mathcal Z_{\mathcal K}}\right]^{-1} \\ \Rightarrow \left|\text{det}\left[\frac{\partial f_{\mathcal K}^{-1}(\mathcal X)}{\partial \mathcal X}\right]\right| = \left|\text{det}\left[\frac{\partial f_{\mathcal K}(\mathcal Z_{\mathcal K})}{\partial \mathcal Z_{\mathcal K}}\right]\right|^{-1} \end{cases} ⎩ ⎨ ⎧∂X∂fK−1(X)⋅∂ZK∂fK(ZK)=1⇒∂X∂fK−1(X)=[∂ZK∂fK(ZK)]−1⇒ det[∂X∂fK−1(X)] = det[∂ZK∂fK(ZK)] −1
最终,分布 P X ( X ) \mathcal P_{\mathcal X}(\mathcal X) PX(X)与分布 P Z K ( Z K ) \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PZK(ZK)之间的关系表示为:
P X ( X ) = ∣ det [ ∂ f K ( Z K ) ∂ Z K ] ∣ − 1 ⋅ P Z K ( Z K ) \mathcal P_{\mathcal X}(\mathcal X) = \left|\text{det}\left[\frac{\partial f_{\mathcal K}(\mathcal Z_{\mathcal K})}{\partial \mathcal Z_{\mathcal K}}\right]\right|^{-1} \cdot \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PX(X)= det[∂ZK∂fK(ZK)] −1⋅PZK(ZK)
至此,从随机变量 Z K \mathcal Z_{\mathcal K} ZK与随机变量 X \mathcal X X之间的函数关系,转化为概率分布 P X ( X ) \mathcal P_{\mathcal X}(\mathcal X) PX(X)与 P Z K ( Z K ) \mathcal P_{\mathcal Z_{\mathcal K}}(\mathcal Z_{\mathcal K}) PZK(ZK)之间的函数关系已表示出来。而流模型中的每一个过程均是基于上述关系,一层一层计算过来。
不同于以往对
P
(
X
)
\mathcal P(\mathcal X)
P(X)的求解过程,它能够将
P
(
X
)
\mathcal P(\mathcal X)
P(X)描述出来,直到使用隐变量的层数选择完成,其对应的
P
(
X
)
\mathcal P(\mathcal X)
P(X)计算精度达到条件即可。关于流模型的学习方式依然是极大似然估计(
Maximum Likelihood Estimation,MLE
\text{Maximum Likelihood Estimation,MLE}
Maximum Likelihood Estimation,MLE):
log
P
X
(
X
)
=
log
{
∏
k
=
1
K
∣
det
[
∂
f
k
(
Z
k
)
∂
Z
k
]
∣
−
1
⋅
P
i
n
i
t
(
Z
i
n
i
t
)
}
=
log
P
i
n
i
t
(
Z
i
n
i
t
)
+
∑
k
=
1
K
log
{
∣
det
[
∂
f
k
(
Z
k
)
∂
Z
k
]
∣
−
1
}
\begin{aligned} \log \mathcal P_{\mathcal X}(\mathcal X) & = \log \left\{\prod_{k=1}^{\mathcal K} \left|\text{det} \left[\frac{\partial f_{k}(\mathcal Z_k)}{\partial \mathcal Z_k}\right]\right|^{-1} \cdot \mathcal P_{init}(\mathcal Z_{init})\right\} \\ & = \log \mathcal P_{init}(\mathcal Z_{init}) + \sum_{k=1}^{\mathcal K} \log \left\{\left|\text{det} \left[\frac{\partial f_{k}(\mathcal Z_k)}{\partial \mathcal Z_k}\right]\right|^{-1}\right\} \end{aligned}
logPX(X)=log{k=1∏K
det[∂Zk∂fk(Zk)]
−1⋅Pinit(Zinit)}=logPinit(Zinit)+k=1∑Klog{
det[∂Zk∂fk(Zk)]
−1}
相关参考:
雅可比矩阵——百度百科
【机器学习白板推导系列(三十三) ~ 流模型(Flow Based Model)】