一、硬件电路:
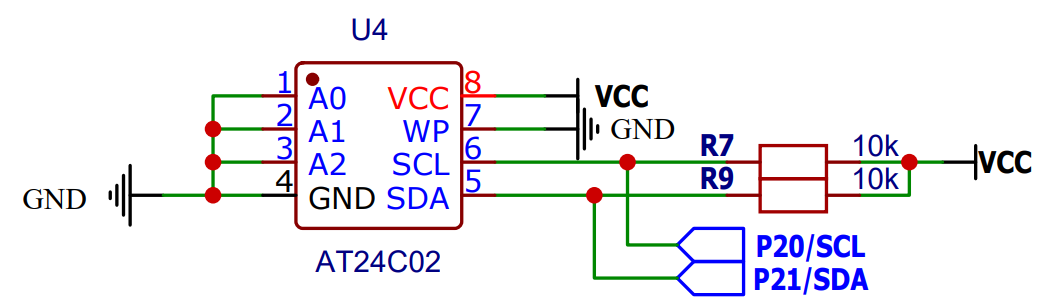
1、引脚功能:
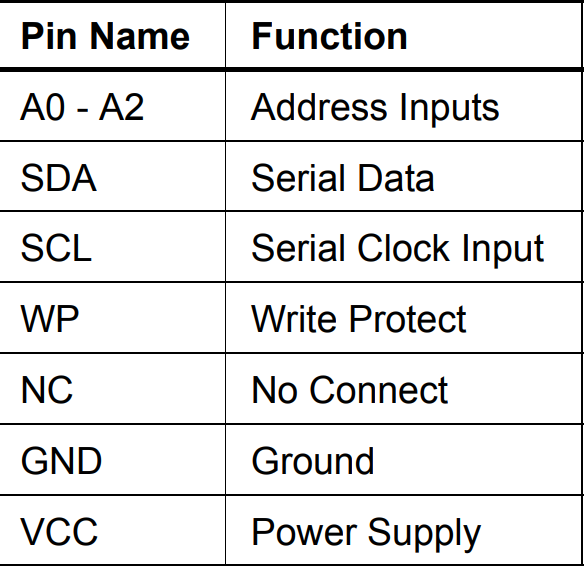
(1)A0-A2:决定不同设备的地址码:
(2)WP:写保护
二、通讯方式(IIC协议)
通讯方式与PCF8591相同,可参考以下文章:
蓝桥杯模块学习16——PCF8591(深夜学习——单片机)_佛科院深夜学习的博客-CSDN博客
1、设备地址:
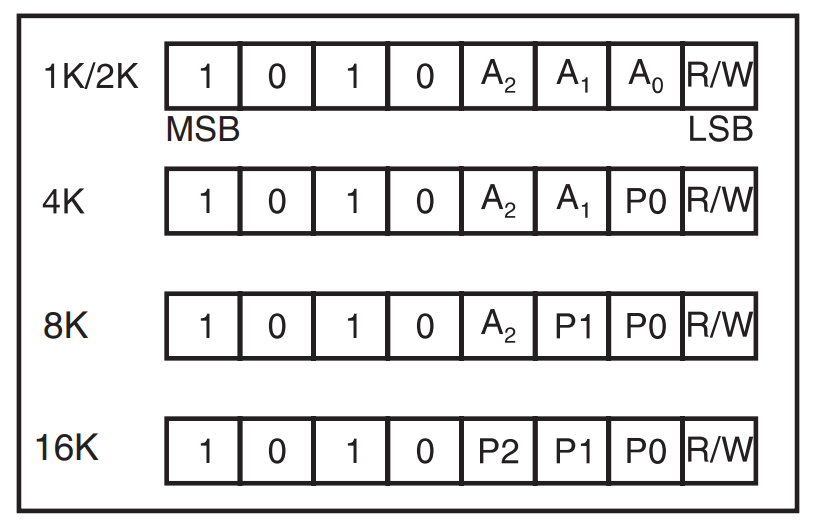
由于我们使用的02型号的所以是2K的
2、按地址读取

先写入读取地址再进行读取
3、连续写或读操作:
我们只需在写或读完数据字节后发送应答信号(“1”),就能进行连续读或写,2K EEPROM最多可以连续读写8个字节
三、AT24C02实验:
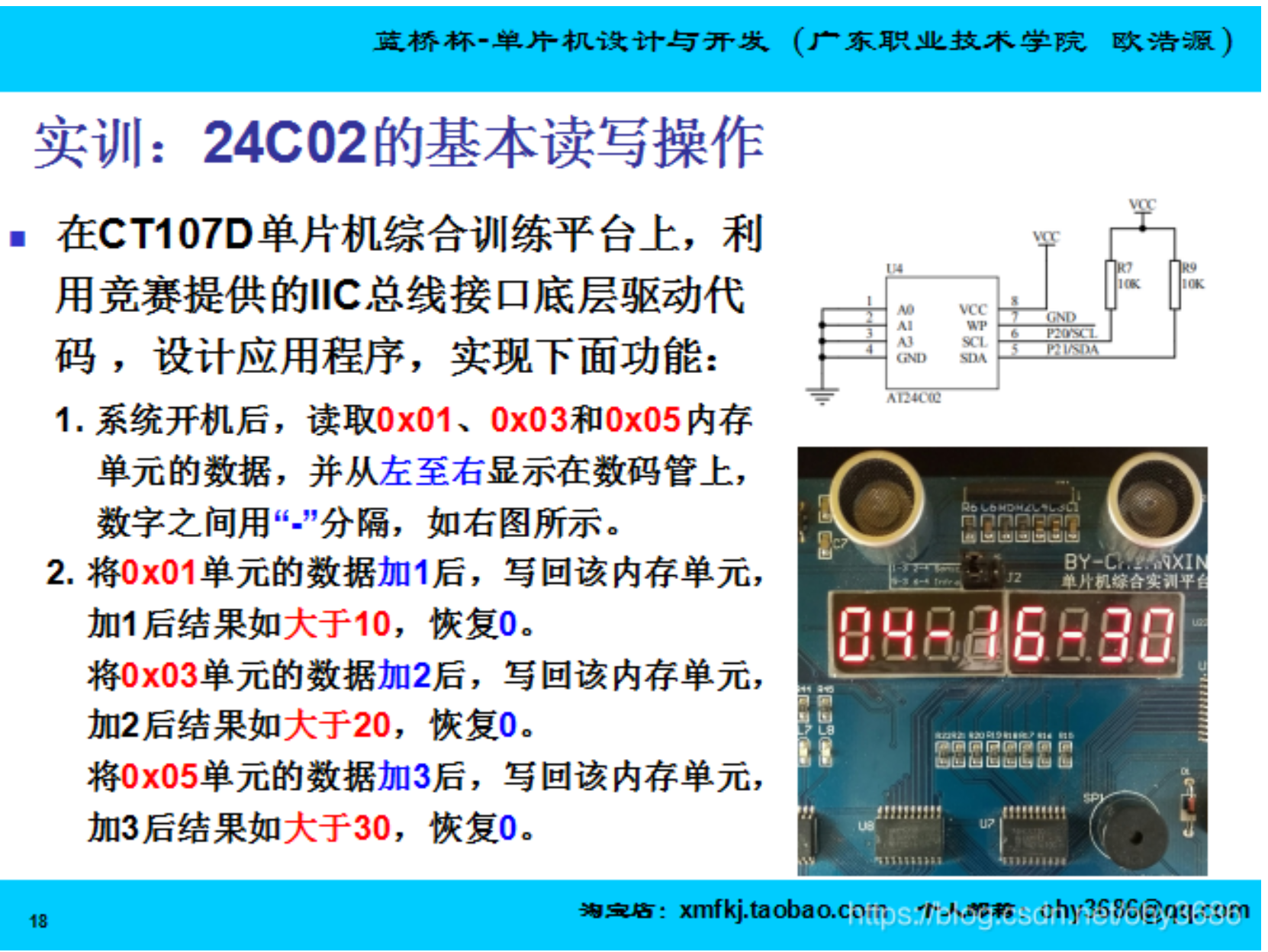
1、代码思路:
定时器1,数码管——》读取AT24C02——》写入AT24C02——》满足实验要求
2、参考代码:
由于题目表达不清晰,我以为是一直循环:将数据+1、+2、+3,再往内存单元中写入,所以给自己增加难度了,如果你想挑战自己可以尝试一下,如果不想可以参考一下文章:
(5条消息) 【蓝桥杯单片机进阶强化-03】24C02存储器的基本原理与应用_小蜜蜂老师的博客-CSDN博客
(1)IIC代码:
#ifndef _IIC_H
#define _IIC_H
#include <STC15F2K60S2.H>
#include "intrins.h"
#define u8 unsigned char
#define u16 unsigned int
sbit SDA = P2^1;
sbit SCL = P2^0;
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
u8 AT24C02_Read_one(u8 adr);
void AT24C02_Write_one(u8 adr,u8 w_dat);
#endif#include "iic.h"
#define DELAY_TIME 5
//
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit;
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
u8 AT24C02_Read_one(u8 adr)
{
u8 r_dat;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(adr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
r_dat = IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return r_dat;
}
void AT24C02_Write_one(u8 adr,u8 w_dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(adr);
IIC_WaitAck();
IIC_SendByte(w_dat);
IIC_WaitAck();
IIC_Stop();
}(2)主函数:(我使用了一些非抢占式分配的思路,如果看不懂可以就看上面的那篇文章就行)
#include <STC15F2K60S2.H>
#include <stdio.H>
#include "iic.h"
#define u8 unsigned char
#define u16 unsigned int
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0x88, //A
0x83, //b
0xc6, //C
0xa1, //d
0x86, //E
0x8e //F
};
//数码管
u8 COD[8],COT[9],PSI;
u16 seg_delay;
//AT24C02
u8 at24_dat[5],show_dat[3];
u16 cout_11ms;
u16 AT24_dealy[3]={0,1,1};
u8 show_delay;
u16 ms_count;
void Close_All();
void Timer1_Init(void);
void SEG_Rroc();
void AT24C02_Proc();
void SEG_Show_Rroc();
void AT24C02_Read_Proc();
void AT24C02_Plus_Proc();
void AT24C02_Write_Proc();
void main()
{
Close_All();
Timer1_Init();
while(1)
{
SEG_Rroc();
SEG_Show_Rroc();
AT24C02_Read_Proc();
AT24C02_Plus_Proc();
AT24C02_Write_Proc();
}
}
/**************定时器******************/
void SEG_Show(u8 COD,u8 PSI);
void Timer1_Isr(void) interrupt 3
{
ms_count++;
if(ms_count == seg_delay) seg_delay = 0;
if(ms_count % 2 == 0) show_delay = 0;
if(ms_count == AT24_dealy[0]) AT24_dealy[0] = 0;
if(ms_count == AT24_dealy[1]) AT24_dealy[1] = 0;
if(ms_count == AT24_dealy[2]) AT24_dealy[2] = 0;
if(ms_count == 1000) ms_count = 0;
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x18; //设置定时初始值
TH1 = 0xFC; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
EA = 1;
}
/*************数码管*******************/
void SEG_TSL(u8* input,u8* output)
{
u8 i;
for(i=0;i<8;i++)
{
switch(input[i])
{
case '0':output[i] = Seg_Table[0];break;
case '1':output[i] = Seg_Table[1];break;
case '2':output[i] = Seg_Table[2];break;
case '3':output[i] = Seg_Table[3];break;
case '4':output[i] = Seg_Table[4];break;
case '5':output[i] = Seg_Table[5];break;
case '6':output[i] = Seg_Table[6];break;
case '7':output[i] = Seg_Table[7];break;
case '8':output[i] = Seg_Table[8];break;
case '9':output[i] = Seg_Table[9];break;
case '-':output[i] = ~0x40;break;
default:output[i] = 0xff;
}
}
}
void SEG_Show(u8 COD,u8 PSI)
{
//消隐
P0 = 0xff;
P2 = P2 & 0x1f | (0x70<<1);
P2 &= 0x1f;
//位选
P0 = 0x01<<PSI;
P2 = P2 & 0x1f | (0x60<<1);
P2 &= 0x1f;
//段选
P0 = COD;
P2 = P2 & 0x1f | (0x70<<1);
P2 &= 0x1f;
}
/**************************************/
/*
关闭无关设备
*/
void Close_All()
{
//关闭蜂鸣器和继电器
P0 = 0x00;
P2 = P2 & 0x1f | (0x50<<1);
P2 &= 0x1f;
//关闭LED
P0 = 0xff;
P2 = P2 & 0x1f | (0x40<<1);
P2 &= 0x1f;
}
void SEG_Rroc()
{
if(seg_delay)return;
seg_delay = 997;
sprintf(COT,"%02u-%02u-%02u",(u16)show_dat[0],(u16)show_dat[1],(u16)show_dat[2]);
SEG_TSL(COT,COD);
}
void SEG_Show_Rroc()
{
if(show_delay)return;
show_delay = 1;
SEG_Show(COD[PSI],PSI);
if(PSI++ == 7)PSI = 0;
}
void AT24C02_Read_Proc()
{
static r_num=0;
if(AT24_dealy[0])return;
AT24_dealy[0] = 499;
AT24_dealy[0] += 10*(r_num+1);
EA = 0;
at24_dat[r_num] = AT24C02_Read_one(0x01+2*r_num);
show_dat[r_num] = at24_dat[r_num];
EA = 1;
if(r_num++ == 2)r_num = 0;
}
void AT24C02_Plus_Proc()
{
if(AT24_dealy[1])return;
AT24_dealy[1] = 599;
at24_dat[0] +=1;
at24_dat[1] +=2;
at24_dat[2] +=3;
if(at24_dat[0] > 10)
at24_dat[0] = 0;
if(at24_dat[1] > 20)
at24_dat[1] = 0;
if(at24_dat[2] > 30)
at24_dat[2] = 0;
}
void AT24C02_Write_Proc()
{
static w_num=0;
if(AT24_dealy[2])return;
AT24_dealy[2] = 699;
AT24_dealy[2] += 4*(w_num+1);
EA = 0;
AT24C02_Write_one(0x01+2*w_num,at24_dat[w_num]);
EA = 1;
if(w_num++ == 2)w_num = 0;
}