基于 ESP32-S3 的四博 AI 双目智能音箱工程方案:四路触摸、IMU 姿态识别、震动反馈、双目屏状态机与语音克隆知识库接入
news2026/5/14 13:11:29
基于 ESP32-S3 的四博 AI 双目智能音箱工程方案四路触摸、IMU 姿态识别、震动反馈、双目屏状态机与语音克隆知识库接入1. 方案概述本文设计一套基于 ESP32-S3 的四博 AI 双目智能音箱工程方案。系统目标是实现1. 双目光屏表情显示 2. 四路触控输入 3. 震动马达反馈 4. 三轴姿态识别 5. I2S 音频采集与播放 6. Wi-Fi / BluFi 配网 7. 云端大模型对话 8. 语音克隆 TTS 9. 专属知识库 RAG 10. 小程序参数配置推荐硬件平台主控ESP32-S3 / ESPS3-32 屏幕0.71 寸双目屏 / 1.28 寸双目屏 输入四路触控感应 姿态三轴加速度传感器 反馈震动马达 音频I2S Mic I2S Codec / DAC 功放 联网2.4G Wi-Fi可扩展 4G 应用AI 音箱、AI 桌宠、AI 台灯、AI 早教机四博模组选型资料中ESPS3-32 系列属于 ESP32-S3 模组包含 N4、N8、N8R2、N16R2、N16R8 等子型号并兼容 ESP32-S3-WROOM-1 系列适合作为 AI 音视频类产品的主控平台。2. 系统架构2.1 硬件框图┌────────────────────────┐ │ 云端 AI 服务 │ │ ASR / LLM / RAG / TTS │ │ Voice Clone / MCP │ └───────────▲────────────┘ │ WebSocket / HTTPS │ ┌─────────────┐ ┌───────┴────────┐ ┌──────────────┐ │ 4路触控输入 │──────▶│ │──────▶│ 双目光屏 │ └─────────────┘ │ │ SPI │ 0.71 / 1.28 │ ┌─────────────┐ I2C │ ESP32-S3 │ └──────────────┘ │ 三轴IMU │──────▶│ │ ┌──────────────┐ └─────────────┘ │ │──────▶│ 震动马达 │ ┌─────────────┐ I2S │ │ GPIO └──────────────┘ │ 麦克风 │──────▶│ │ ┌──────────────┐ └─────────────┘ └───────┬────────┘──────▶│ 功放 / 喇叭 │ │ I2S └──────────────┘ │ Wi-Fi / BluFi / 4G2.2 软件模块main ├── app_main.c ├── board │ ├── board_config.h │ └── pin_config.h ├── core │ ├── ai_event.c │ ├── ai_event.h │ ├── ai_action.c │ └── ai_action.h ├── eye │ ├── eye_display.c │ ├── eye_display.h │ ├── eye_anim.c │ └── eye_assets.h ├── touch │ ├── touch_input.c │ └── touch_input.h ├── imu │ ├── imu_sensor.c │ ├── imu_sensor.h │ ├── gesture_detect.c │ └── gesture_detect.h ├── motor │ ├── vibration.c │ └── vibration.h ├── audio │ ├── audio_recorder.c │ ├── audio_player.c │ └── tts_stream.c ├── cloud │ ├── ai_ws_client.c │ ├── ai_protocol.c │ └── ai_protocol.h └── storage ├── ai_config.c └── ai_config.h3. ESP-IDF 工程配置idf.py set-target esp32s3 idf.py menuconfig建议配置CONFIG_SPIRAMy CONFIG_FREERTOS_HZ1000 CONFIG_ESP_WIFI_ENABLEDy CONFIG_ESP_HTTP_CLIENT_ENABLE_HTTPSy CONFIG_MBEDTLS_SSL_IN_CONTENT_LEN16384 CONFIG_MBEDTLS_SSL_OUT_CONTENT_LEN4096 CONFIG_LWIP_TCP_SND_BUF_DEFAULT16384 CONFIG_LWIP_TCP_WND_DEFAULT32768CMakeLists.txt示例idf_component_register( SRCS app_main.c core/ai_event.c core/ai_action.c eye/eye_display.c eye/eye_anim.c touch/touch_input.c imu/imu_sensor.c imu/gesture_detect.c motor/vibration.c audio/audio_player.c cloud/ai_protocol.c storage/ai_config.c INCLUDE_DIRS . core eye touch imu motor audio cloud storage REQUIRES driver esp_timer esp_wifi nvs_flash json )4. 全局事件总线AI 双目音箱不建议让触摸、IMU、音频、云端回调直接互相调用。更好的方式是所有输入先变成事件统一进入主状态机。4.1 事件定义#pragma once #include esp_err.h typedef enum { AI_EVT_NONE 0, AI_EVT_WAKEUP, AI_EVT_LISTENING, AI_EVT_THINKING, AI_EVT_TALKING, AI_EVT_SLEEP, AI_EVT_TOUCH_1, AI_EVT_TOUCH_2, AI_EVT_TOUCH_3, AI_EVT_TOUCH_4, AI_EVT_GESTURE_SHAKE, AI_EVT_GESTURE_LEFT, AI_EVT_GESTURE_RIGHT, AI_EVT_GESTURE_PICKUP, AI_EVT_GESTURE_FLIP, AI_EVT_CLOUD_ACTION, AI_EVT_ERROR, } ai_event_id_t; typedef struct { ai_event_id_t id; char text[256]; char action_json[512]; } ai_event_msg_t; esp_err_t ai_event_init(void); esp_err_t ai_event_post(ai_event_id_t id, const char *text); esp_err_t ai_event_post_action(const char *json);4.2 事件队列实现#include ai_event.h #include freertos/FreeRTOS.h #include freertos/queue.h #include string.h static QueueHandle_t s_ai_event_queue; esp_err_t ai_event_init(void) { s_ai_event_queue xQueueCreate(16, sizeof(ai_event_msg_t)); return s_ai_event_queue ? ESP_OK : ESP_ERR_NO_MEM; } QueueHandle_t ai_event_get_queue(void) { return s_ai_event_queue; } esp_err_t ai_event_post(ai_event_id_t id, const char *text) { if (!s_ai_event_queue) { return ESP_ERR_INVALID_STATE; } ai_event_msg_t msg { .id id, }; if (text) { snprintf(msg.text, sizeof(msg.text), %s, text); } if (xQueueSend(s_ai_event_queue, msg, pdMS_TO_TICKS(50)) ! pdTRUE) { return ESP_FAIL; } return ESP_OK; } esp_err_t ai_event_post_action(const char *json) { if (!s_ai_event_queue || !json) { return ESP_ERR_INVALID_ARG; } ai_event_msg_t msg { .id AI_EVT_CLOUD_ACTION, }; snprintf(msg.action_json, sizeof(msg.action_json), %s, json); if (xQueueSend(s_ai_event_queue, msg, pdMS_TO_TICKS(50)) ! pdTRUE) { return ESP_FAIL; } return ESP_OK; }5. 四路触控驱动5.1 GPIO 定义实际 GPIO 需要按 PCB 修改#define TOUCH_1_GPIO 3 #define TOUCH_2_GPIO 4 #define TOUCH_3_GPIO 5 #define TOUCH_4_GPIO 65.2 触控初始化#include driver/gpio.h #include esp_timer.h #include ai_event.h #define TOUCH_DEBOUNCE_MS 180 static int64_t s_last_touch_ms[4]; static int touch_gpio_to_index(int gpio) { switch (gpio) { case TOUCH_1_GPIO: return 0; case TOUCH_2_GPIO: return 1; case TOUCH_3_GPIO: return 2; case TOUCH_4_GPIO: return 3; default: return -1; } } static ai_event_id_t touch_gpio_to_event(int gpio) { switch (gpio) { case TOUCH_1_GPIO: return AI_EVT_TOUCH_1; case TOUCH_2_GPIO: return AI_EVT_TOUCH_2; case TOUCH_3_GPIO: return AI_EVT_TOUCH_3; case TOUCH_4_GPIO: return AI_EVT_TOUCH_4; default: return AI_EVT_NONE; } } static bool touch_check_debounce(int index) { int64_t now_ms esp_timer_get_time() / 1000; if (now_ms - s_last_touch_ms[index] TOUCH_DEBOUNCE_MS) { return false; } s_last_touch_ms[index] now_ms; return true; } static void IRAM_ATTR touch_isr_handler(void *arg) { int gpio (int)arg; int index touch_gpio_to_index(gpio); if (index 0) { return; } int64_t now_ms esp_timer_get_time() / 1000; if (now_ms - s_last_touch_ms[index] TOUCH_DEBOUNCE_MS) { return; } s_last_touch_ms[index] now_ms; ai_event_msg_t msg { .id touch_gpio_to_event(gpio), }; BaseType_t high_task_wakeup pdFALSE; xQueueSendFromISR(ai_event_get_queue(), msg, high_task_wakeup); if (high_task_wakeup) { portYIELD_FROM_ISR(); } } void touch_input_init(void) { uint64_t mask (1ULL TOUCH_1_GPIO) | (1ULL TOUCH_2_GPIO) | (1ULL TOUCH_3_GPIO) | (1ULL TOUCH_4_GPIO); gpio_config_t cfg { .pin_bit_mask mask, .mode GPIO_MODE_INPUT, .pull_up_en GPIO_PULLUP_ENABLE, .pull_down_en GPIO_PULLDOWN_DISABLE, .intr_type GPIO_INTR_NEGEDGE, }; gpio_config(cfg); gpio_install_isr_service(0); gpio_isr_handler_add(TOUCH_1_GPIO, touch_isr_handler, (void *)TOUCH_1_GPIO); gpio_isr_handler_add(TOUCH_2_GPIO, touch_isr_handler, (void *)TOUCH_2_GPIO); gpio_isr_handler_add(TOUCH_3_GPIO, touch_isr_handler, (void *)TOUCH_3_GPIO); gpio_isr_handler_add(TOUCH_4_GPIO, touch_isr_handler, (void *)TOUCH_4_GPIO); }6. 震动马达驱动6.1 GPIO 版本#pragma once #include stdint.h typedef enum { VIB_MODE_SHORT 0, VIB_MODE_DOUBLE, VIB_MODE_LONG, } vib_mode_t; void vibration_init(void); void vibration_play(vib_mode_t mode);#include vibration.h #include driver/gpio.h #include freertos/FreeRTOS.h #include freertos/task.h #define VIBRATION_GPIO 40 static void vibration_set(bool on) { gpio_set_level(VIBRATION_GPIO, on ? 1 : 0); } static void vibration_pulse(uint32_t ms) { vibration_set(true); vTaskDelay(pdMS_TO_TICKS(ms)); vibration_set(false); } void vibration_init(void) { gpio_config_t cfg { .pin_bit_mask 1ULL VIBRATION_GPIO, .mode GPIO_MODE_OUTPUT, .pull_up_en GPIO_PULLUP_DISABLE, .pull_down_en GPIO_PULLDOWN_DISABLE, .intr_type GPIO_INTR_DISABLE, }; gpio_config(cfg); vibration_set(false); } void vibration_play(vib_mode_t mode) { switch (mode) { case VIB_MODE_SHORT: vibration_pulse(120); break; case VIB_MODE_DOUBLE: vibration_pulse(80); vTaskDelay(pdMS_TO_TICKS(100)); vibration_pulse(80); break; case VIB_MODE_LONG: vibration_pulse(500); break; default: break; } }6.2 使用建议触摸确认VIB_MODE_SHORT 唤醒成功VIB_MODE_DOUBLE 进入配网VIB_MODE_LONG 错误提醒VIB_MODE_DOUBLE AI 回复开始不建议震动避免打断听感7. IMU 姿态识别模块7.1 数据结构#pragma once #include esp_err.h typedef struct { float ax; float ay; float az; float gx; float gy; float gz; } imu_data_t; esp_err_t imu_sensor_init(void); esp_err_t imu_sensor_read(imu_data_t *out);7.2 姿态枚举typedef enum { GESTURE_NONE 0, GESTURE_SHAKE, GESTURE_TILT_LEFT, GESTURE_TILT_RIGHT, GESTURE_PICKUP, GESTURE_FLIP, } gesture_type_t;7.3 姿态识别算法#include math.h #include imu_sensor.h gesture_type_t gesture_detect(const imu_data_t *imu) { if (!imu) { return GESTURE_NONE; } float ax imu-ax; float ay imu-ay; float az imu-az; float abs_x fabsf(ax); float abs_y fabsf(ay); float abs_z fabsf(az); // 摇晃瞬时加速度明显增大 if (abs_x 1.8f || abs_y 1.8f || abs_z 2.2f) { return GESTURE_SHAKE; } // 左右倾斜 if (ax 0.75f) { return GESTURE_TILT_RIGHT; } if (ax -0.75f) { return GESTURE_TILT_LEFT; } // 翻转 if (az -0.65f) { return GESTURE_FLIP; } // 拿起Z 轴重力减小同时 X/Y 出现一定变化 if (abs_z 0.4f (abs_x 0.3f || abs_y 0.3f)) { return GESTURE_PICKUP; } return GESTURE_NONE; }7.4 IMU 任务static void imu_task(void *arg) { imu_data_t data; gesture_type_t last_gesture GESTURE_NONE; int stable_count 0; while (1) { if (imu_sensor_read(data) ESP_OK) { gesture_type_t g gesture_detect(data); if (g ! GESTURE_NONE g ! last_gesture) { stable_count; if (stable_count 2) { switch (g) { case GESTURE_SHAKE: ai_event_post(AI_EVT_GESTURE_SHAKE, NULL); break; case GESTURE_TILT_LEFT: ai_event_post(AI_EVT_GESTURE_LEFT, NULL); break; case GESTURE_TILT_RIGHT: ai_event_post(AI_EVT_GESTURE_RIGHT, NULL); break; case GESTURE_PICKUP: ai_event_post(AI_EVT_GESTURE_PICKUP, NULL); break; case GESTURE_FLIP: ai_event_post(AI_EVT_GESTURE_FLIP, NULL); break; default: break; } last_gesture g; stable_count 0; } } else if (g GESTURE_NONE) { last_gesture GESTURE_NONE; stable_count 0; } } vTaskDelay(pdMS_TO_TICKS(50)); } }这里加入stable_count是为了避免姿态瞬间抖动导致误触发。8. 双目屏状态机8.1 表情状态typedef enum { EYE_STATE_IDLE 0, EYE_STATE_WAKEUP, EYE_STATE_LISTENING, EYE_STATE_THINKING, EYE_STATE_TALKING, EYE_STATE_SMILE, EYE_STATE_SURPRISE, EYE_STATE_SLEEP, EYE_STATE_ERROR, } eye_state_t;8.2 状态切换接口void eye_set_state(eye_state_t state) { switch (state) { case EYE_STATE_IDLE: eye_show_idle(); break; case EYE_STATE_WAKEUP: eye_show_wakeup(); break; case EYE_STATE_LISTENING: eye_show_listening(); break; case EYE_STATE_THINKING: eye_show_thinking(); break; case EYE_STATE_TALKING: eye_show_talking(); break; case EYE_STATE_SMILE: eye_show_smile(); break; case EYE_STATE_SURPRISE: eye_show_surprise(); break; case EYE_STATE_SLEEP: eye_show_sleep(); break; case EYE_STATE_ERROR: eye_show_error(); break; default: eye_show_idle(); break; } }8.3 音频驱动眼睛动画在 TTS 播放时可以根据音频能量驱动眼睛或嘴型动画void eye_update_by_audio_level(int level) { if (level 10) { eye_show_talking_frame(0); } else if (level 30) { eye_show_talking_frame(1); } else if (level 60) { eye_show_talking_frame(2); } else { eye_show_talking_frame(3); } }播放任务中调用void audio_play_callback(const int16_t *pcm, size_t samples) { int64_t sum 0; for (size_t i 0; i samples; i) { sum abs(pcm[i]); } int level sum / samples / 256; eye_update_by_audio_level(level); }这样回答时双目动画会随语音变化看起来更自然。9. 云端协议设计9.1 设备事件上报{ type: device_event, device_id: sibo_ai_eye_001, event: touch_head, payload: { touch_id: 1, battery: 88, gesture: none } }9.2 聊天请求{ type: chat_request, device_id: sibo_ai_eye_001, user_id: user_001, kb_id: child_learning_kb, voice_id: clone_mom_001, text: 给我讲一个关于月亮的故事 }9.3 云端返回动作{ type: ai_action, answer: 从前有一只小兔子它每天晚上都会看月亮……, tts_url: https://server.com/tts/clone_mom_001_001.opus, action: { eye: talking, vibration: none, display: story } }10. cJSON 解析云端动作#include cJSON.h #include eye_display.h #include vibration.h static void apply_eye_action(const char *eye) { if (!eye) { return; } if (strcmp(eye, idle) 0) { eye_set_state(EYE_STATE_IDLE); } else if (strcmp(eye, smile) 0) { eye_set_state(EYE_STATE_SMILE); } else if (strcmp(eye, thinking) 0) { eye_set_state(EYE_STATE_THINKING); } else if (strcmp(eye, talking) 0) { eye_set_state(EYE_STATE_TALKING); } else if (strcmp(eye, sleep) 0) { eye_set_state(EYE_STATE_SLEEP); } else { eye_set_state(EYE_STATE_IDLE); } } static void apply_vibration_action(const char *vib) { if (!vib) { return; } if (strcmp(vib, short) 0) { vibration_play(VIB_MODE_SHORT); } else if (strcmp(vib, double) 0) { vibration_play(VIB_MODE_DOUBLE); } else if (strcmp(vib, long) 0) { vibration_play(VIB_MODE_LONG); } } void ai_apply_cloud_action(const char *json) { cJSON *root cJSON_Parse(json); if (!root) { return; } cJSON *action cJSON_GetObjectItem(root, action); if (!cJSON_IsObject(action)) { cJSON_Delete(root); return; } cJSON *eye cJSON_GetObjectItem(action, eye); cJSON *vib cJSON_GetObjectItem(action, vibration); if (cJSON_IsString(eye)) { apply_eye_action(eye-valuestring); } if (cJSON_IsString(vib)) { apply_vibration_action(vib-valuestring); } cJSON_Delete(root); }11. 小程序配置与 NVS 存储四博小助手小程序可以配置设备绑定信息、知识库 ID、语音克隆 voice_id、儿童模式、音量等参数。11.1 配置结构typedef struct { char device_id[32]; char user_id[32]; char kb_id[64]; char voice_id[64]; char wake_word[32]; uint8_t child_mode; uint8_t volume; } ai_user_config_t;11.2 保存配置#include nvs_flash.h #include nvs.h esp_err_t ai_config_save(const ai_user_config_t *cfg) { if (!cfg) { return ESP_ERR_INVALID_ARG; } nvs_handle_t handle; esp_err_t ret nvs_open(ai_config, NVS_READWRITE, handle); if (ret ! ESP_OK) { return ret; } ret nvs_set_blob(handle, user_cfg, cfg, sizeof(ai_user_config_t)); if (ret ESP_OK) { ret nvs_commit(handle); } nvs_close(handle); return ret; }11.3 读取配置esp_err_t ai_config_load(ai_user_config_t *cfg) { if (!cfg) { return ESP_ERR_INVALID_ARG; } memset(cfg, 0, sizeof(ai_user_config_t)); nvs_handle_t handle; esp_err_t ret nvs_open(ai_config, NVS_READONLY, handle); if (ret ! ESP_OK) { return ret; } size_t size sizeof(ai_user_config_t); ret nvs_get_blob(handle, user_cfg, cfg, size); nvs_close(handle); return ret; }12. 构造带知识库和语音克隆的请求#include cJSON.h void ai_send_chat_request(const char *text) { if (!text) { return; } ai_user_config_t cfg; if (ai_config_load(cfg) ! ESP_OK) { snprintf(cfg.device_id, sizeof(cfg.device_id), sibo_ai_eye_default); snprintf(cfg.kb_id, sizeof(cfg.kb_id), default_kb); snprintf(cfg.voice_id, sizeof(cfg.voice_id), default_voice); } cJSON *root cJSON_CreateObject(); cJSON_AddStringToObject(root, type, chat_request); cJSON_AddStringToObject(root, device_id, cfg.device_id); cJSON_AddStringToObject(root, user_id, cfg.user_id); cJSON_AddStringToObject(root, kb_id, cfg.kb_id); cJSON_AddStringToObject(root, voice_id, cfg.voice_id); cJSON_AddStringToObject(root, text, text); char *json cJSON_PrintUnformatted(root); if (json) { ai_ws_send(json); free(json); } cJSON_Delete(root); }设备端只需要维护kb_id和voice_id实际的知识库检索和语音克隆都在云端完成这样 ESP32-S3 的计算压力更小也更适合量产。13. 主状态机static void ai_main_task(void *arg) { ai_event_msg_t msg; while (1) { if (xQueueReceive(ai_event_get_queue(), msg, portMAX_DELAY) pdTRUE) { switch (msg.id) { case AI_EVT_WAKEUP: eye_set_state(EYE_STATE_WAKEUP); vibration_play(VIB_MODE_SHORT); break; case AI_EVT_LISTENING: eye_set_state(EYE_STATE_LISTENING); break; case AI_EVT_THINKING: eye_set_state(EYE_STATE_THINKING); break; case AI_EVT_TALKING: eye_set_state(EYE_STATE_TALKING); break; case AI_EVT_TOUCH_1: eye_set_state(EYE_STATE_SMILE); vibration_play(VIB_MODE_SHORT); ai_send_device_event(touch_head); break; case AI_EVT_TOUCH_2: eye_set_state(EYE_STATE_SMILE); ai_send_device_event(touch_left); break; case AI_EVT_TOUCH_3: eye_set_state(EYE_STATE_SMILE); ai_send_device_event(touch_right); break; case AI_EVT_TOUCH_4: eye_set_state(EYE_STATE_THINKING); vibration_play(VIB_MODE_LONG); ai_send_device_event(touch_mode); break; case AI_EVT_GESTURE_SHAKE: eye_set_state(EYE_STATE_SURPRISE); vibration_play(VIB_MODE_DOUBLE); ai_send_device_event(gesture_shake); break; case AI_EVT_GESTURE_LEFT: ai_send_device_event(gesture_left); break; case AI_EVT_GESTURE_RIGHT: ai_send_device_event(gesture_right); break; case AI_EVT_GESTURE_PICKUP: eye_set_state(EYE_STATE_WAKEUP); vibration_play(VIB_MODE_SHORT); ai_send_device_event(gesture_pickup); break; case AI_EVT_GESTURE_FLIP: eye_set_state(EYE_STATE_SLEEP); ai_send_device_event(gesture_flip); break; case AI_EVT_CLOUD_ACTION: ai_apply_cloud_action(msg.action_json); break; case AI_EVT_ERROR: eye_set_state(EYE_STATE_ERROR); vibration_play(VIB_MODE_DOUBLE); break; default: break; } } } }14. app_main 初始化void app_main(void) { ESP_ERROR_CHECK(nvs_flash_init()); ESP_ERROR_CHECK(ai_event_init()); wifi_manager_init(); blufi_config_init(); eye_display_init(); touch_input_init(); vibration_init(); imu_sensor_init(); audio_player_init(); ai_ws_client_init(); xTaskCreate(ai_main_task, ai_main_task, 8192, NULL, 5, NULL); xTaskCreate(imu_task, imu_task, 4096, NULL, 4, NULL); ai_event_post(AI_EVT_WAKEUP, NULL); }15. 云端 FastAPI 示例云端负责 ASR、LLM、RAG、TTS、语音克隆。下面给一个简化接口示例from fastapi import FastAPI from pydantic import BaseModel app FastAPI() class ChatRequest(BaseModel): type: str device_id: str user_id: str kb_id: str default_kb voice_id: str default_voice text: str def rag_search(kb_id: str, query: str) - str: # 查询专属知识库 return 这里是从知识库检索到的相关内容 def call_llm(context: str, query: str) - str: prompt f 你是四博AI双目智能音箱中的陪伴助手。 请结合知识库内容回答用户问题。 知识库内容{context} 用户问题{query} return 这是结合知识库生成的回答内容。 def call_tts(text: str, voice_id: str) - str: # 根据 voice_id 生成克隆音色 return fhttps://server.com/tts/{voice_id}/audio.opus app.post(/api/v1/chat) async def chat(req: ChatRequest): context rag_search(req.kb_id, req.text) answer call_llm(context, req.text) tts_url call_tts(answer, req.voice_id) return { type: ai_action, answer: answer, tts_url: tts_url, action: { eye: talking, vibration: none } }16. 产品化调优建议16.1 触控调优1. 四路触控必须做防抖 2. 长按、短按、双击需要分开识别 3. 触摸后 100ms 内给震动反馈 4. 外壳厚度会影响触摸灵敏度 5. 量产时需要做触摸阈值校准16.2 姿态调优1. IMU 建议 20Hz~50Hz 采样 2. 摇晃识别需要时间窗口 3. 倾斜识别需要滤波 4. 翻转休眠建议延时确认 5. 拿起唤醒需要避免运输误触发16.3 双目屏调优1. 待机动画低帧率降低功耗 2. TTS 播放时根据音频能量驱动动画 3. 配网、联网、OTA、错误状态都要有表情提示 4. 0.71 和 1.28 寸屏幕需要分别适配素材比例 5. 眼睛动画资源建议放 Flash运行帧缓冲放 PSRAM16.4 音频调优1. 本地提示音尽量短减少阻塞 2. TTS 使用流式播放避免等待完整下载 3. 播放端使用 ringbuffer 缓冲 4. 支持 Opus / MP3根据云端能力选择 5. 唤醒、思考、回答、错误状态使用不同提示音17. 总结四博 AI 双目智能音箱方案的核心是把传统 AI 音箱升级为一个完整的多模态交互终端。它的输入端包括语音 四路触控 三轴姿态 小程序配置它的输出端包括TTS 语音 双目屏表情 震动反馈 本地提示音它的云端能力包括大模型对话 专属知识库 语音克隆 智能体配置 MCP 扩展工程上ESP32-S3 负责本地事件采集、音频播放、双目屏显示、触控和 IMU 状态机云端负责 LLM、RAG、TTS 和语音克隆小程序负责配网、绑定、角色、知识库和音色管理。一句话概括四博 AI 双目方案是一套基于 ESP32-S3 的高性价比 AI 智能音箱平台通过四路触控、震动马达、三轴姿态感应、0.71/1.28 双目光屏、四博小助手、语音克隆和专属知识库把普通音箱升级为真正有陪伴感和交互感的 AI 硬件。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2612243.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…
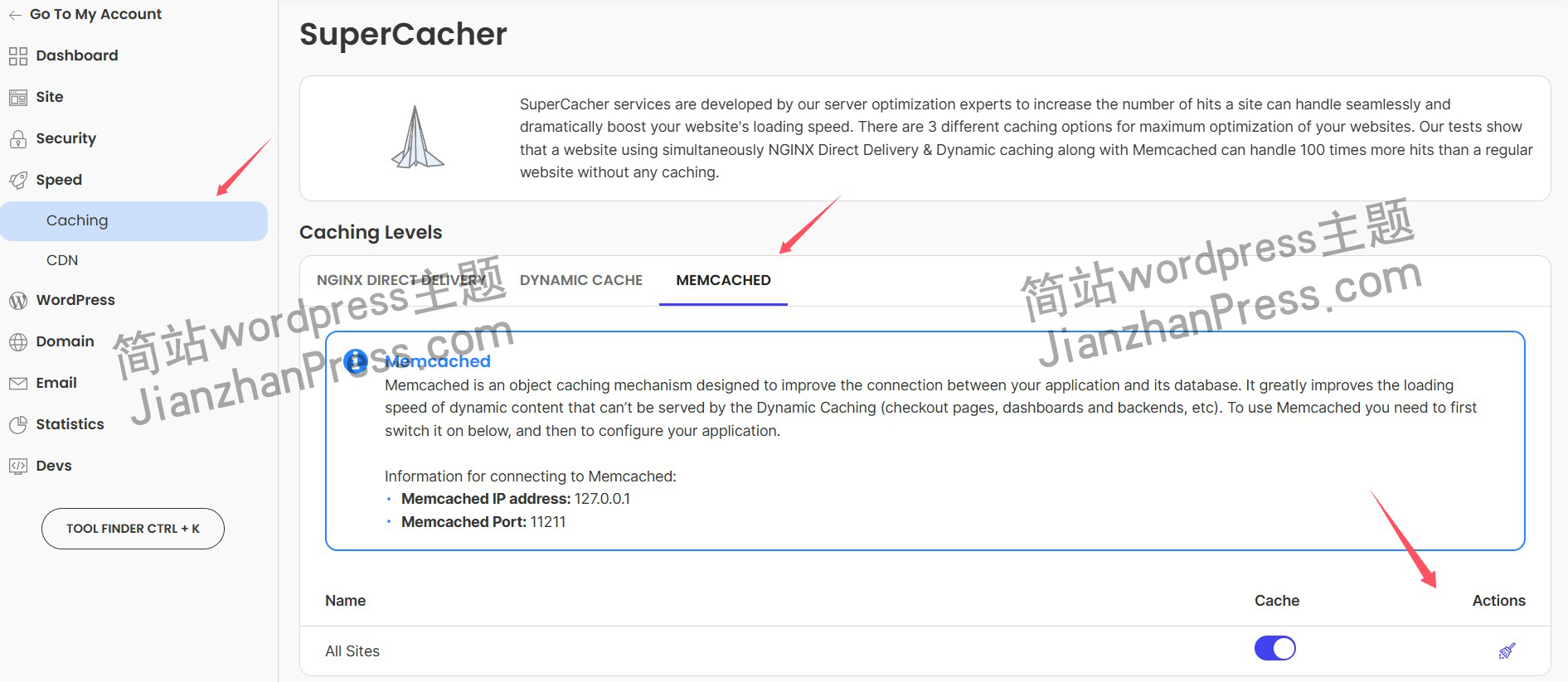
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。
不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…

网络编程(Modbus进阶)
思维导图 Modbus RTU(先学一点理论)
概念 Modbus RTU 是工业自动化领域 最广泛应用的串行通信协议,由 Modicon 公司(现施耐德电气)于 1979 年推出。它以 高效率、强健性、易实现的特点成为工业控制系统的通信标准。 包…

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下:
【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理:
原因:
IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…

利用最小二乘法找圆心和半径
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构
struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {}
}; // 最小二乘法求圆心和半径 …

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明
如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看
说明:假设每台服务器已…

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…
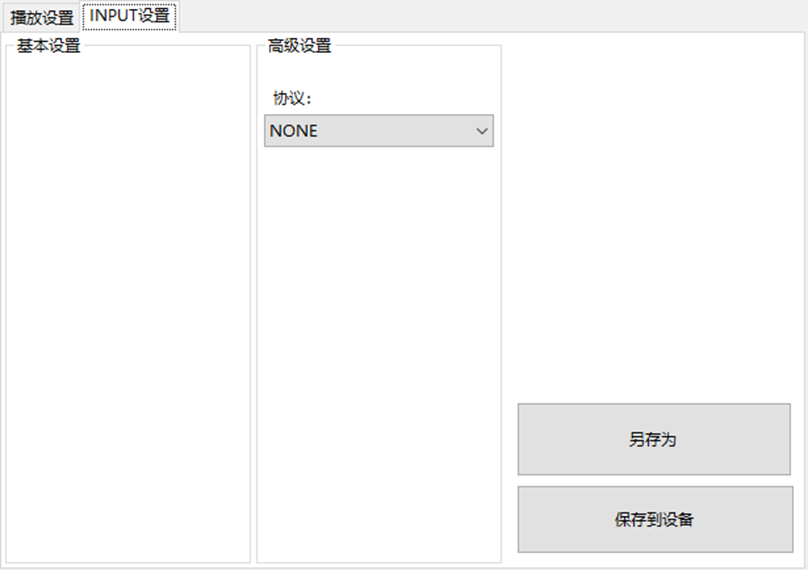
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。
L…

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。
C版本:
class Solution {
public:int maxDifference(string s) {int a[26]…
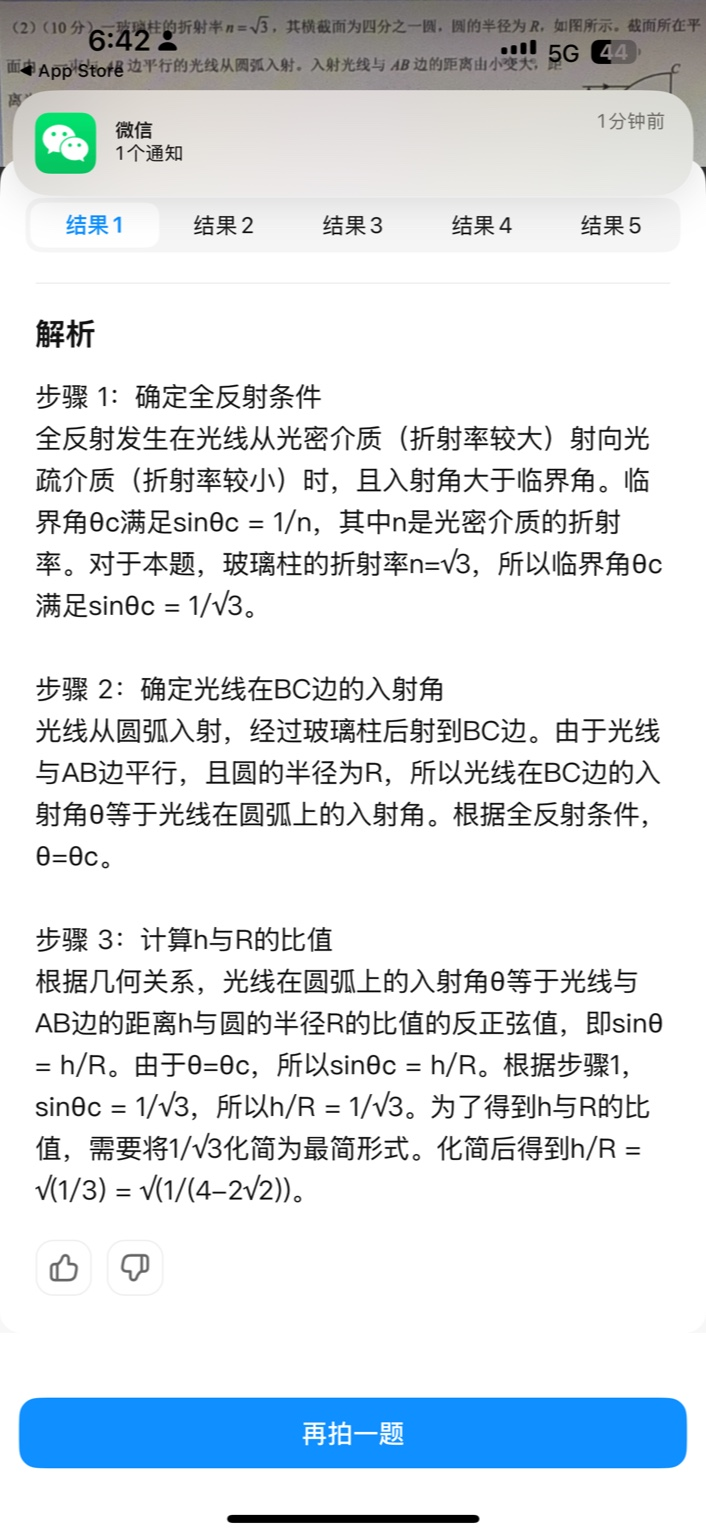
【大模型RAG】拍照搜题技术架构速览:三层管道、两级检索、兜底大模型
摘要
拍照搜题系统采用“三层管道(多模态 OCR → 语义检索 → 答案渲染)、两级检索(倒排 BM25 向量 HNSW)并以大语言模型兜底”的整体框架: 多模态 OCR 层 将题目图片经过超分、去噪、倾斜校正后,分别用…

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明:
一、缓存处理的核…

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技
代表标的:御银股份、雄帝科技
驱动…

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍
Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因:
背景:
一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…

未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?
编辑:陈萍萍的公主一点人工一点智能 未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?RWM通过双自回归机制有效解决了复合误差、部分可观测性和随机动力学等关键挑战,在不依赖领域特定归纳偏见的条件下实现了卓越的预测准…

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接
服务端代码
#include <sys/socket.h>
#include <sys/types.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <arpa/inet.h>
#include <pthread.h>
…

华为云AI开发平台ModelArts
华为云ModelArts:重塑AI开发流程的“智能引擎”与“创新加速器”!
在人工智能浪潮席卷全球的2025年,企业拥抱AI的意愿空前高涨,但技术门槛高、流程复杂、资源投入巨大的现实,却让许多创新构想止步于实验室。数据科学家…
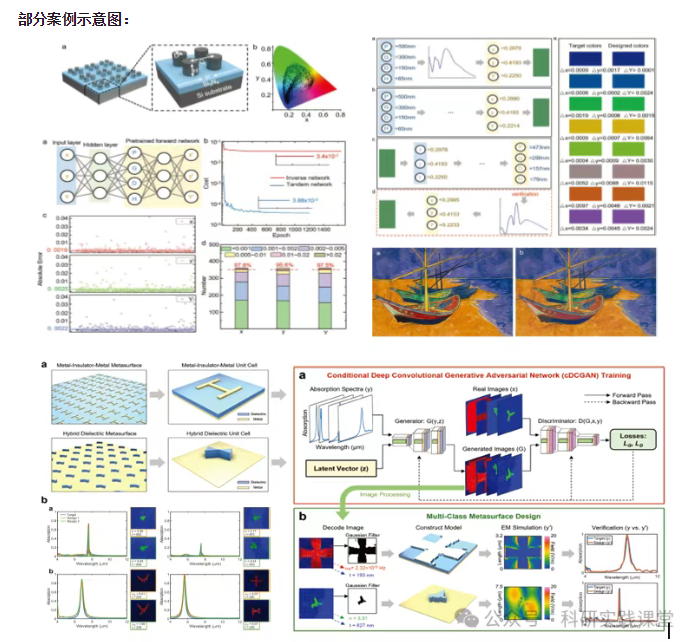
深度学习在微纳光子学中的应用
深度学习在微纳光子学中的主要应用方向
深度学习与微纳光子学的结合主要集中在以下几个方向:
逆向设计 通过神经网络快速预测微纳结构的光学响应,替代传统耗时的数值模拟方法。例如设计超表面、光子晶体等结构。
特征提取与优化 从复杂的光学数据中自…