【Matllab代码】不确定风功率接入下电-气互联系统的分布鲁棒机会约束经济分布式优化调度
news2026/5/3 0:01:35
✅作者简介热爱科研的Matlab仿真开发者擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。 往期回顾关注个人主页Matlab科研工作室 关注我领取海量matlab电子书和数学建模资料个人信条做科研博学之、审问之、慎思之、明辨之、笃行之是为博学慎思明辨笃行。 内容介绍在能源结构调整的大背景下天然气发电机组凭借其清洁高效的特点数量逐步增加使得电力网络与天然气网络的耦合程度不断加深。这种紧密耦合一方面提升了能源综合利用效率但另一方面不确定性新能源如风电的大规模接入给电 - 气互联系统的经济安全运行带来诸多挑战。风电功率的随机波动可能导致电力系统功率失衡进而影响天然气系统的稳定供气反之亦然。因此如何有效应对风电不确定性实现电 - 气互联系统的协同经济安全运行成为亟待解决的关键问题。应对风电不确定性的分布鲁棒机会约束方法一分布鲁棒性概念分布鲁棒性旨在处理模型中不确定参数的概率分布未知或难以精确估计的情况。在电 - 气互联系统中风电功率的不确定性使得传统基于精确概率分布的优化方法不再适用。分布鲁棒方法通过构建模糊集来描述不确定参数可能的取值范围在该模糊集内寻找使系统性能在最坏情况下仍能满足一定要求的最优解从而增强系统对不确定性的鲁棒性。二基于数据驱动的模糊集构建数据收集与分析收集少量的风电预测误差历史数据这些数据反映了风电实际功率与预测功率之间的偏差情况。通过对这些数据进行统计分析获取风电预测误差的一些矩信息如均值、方差等。模糊集形成利用这些矩信息构建与风电不确定性相关的模糊集。例如可以基于切比雪夫不等式或其他概率不等式以矩信息为基础确定模糊集的边界。该模糊集包含了所有可能的风电功率概率分布尽管我们不知道其确切形式但通过模糊集能够对不确定性进行有效界定。三机会约束转化机会约束定义机会约束是指在一定概率水平下满足某些约束条件。在电 - 气互联系统中例如要求在给定的置信水平下电力系统的功率平衡约束和天然气系统的流量平衡约束等仍能得到满足尽管存在风电功率的不确定性。转化为可求解形式将基于模糊集的机会约束问题通过数学变换转化为易于求解的形式。这通常涉及到利用对偶理论、凸优化等数学工具。例如对于一些具有特定结构的机会约束可以将其转化为线性或二次规划问题使得现有的优化求解器能够对其进行高效求解。通过这种转化在考虑风电不确定性的情况下仍能找到满足系统运行要求的最优调度方案。基于松弛交替乘子法的分布式协同运行一隐私保护需求电 - 气互联系统中电力系统和天然气系统各自拥有自身的运行数据和隐私信息如电力系统的电网拓扑、发电成本天然气系统的管道布局、气源成本等。在协同优化调度过程中双方都希望在共享必要信息以实现协同的同时保护自身的隐私不被泄露。二第三方可信任协调者假设为了实现电 - 气互联系统的分布式协同运行并保护双方隐私假设存在一个第三方可信任的协调者。该协调者不参与电 - 气系统的实际运行但负责收集和处理双方传递的信息并协调优化过程。电力系统和天然气系统将各自与优化相关的部分信息传递给协调者协调者根据这些信息进行统一的优化计算并将优化结果反馈给双方。三松弛交替乘子法原理与应用原理松弛交替乘子法是一种用于求解分布式优化问题的有效算法。它通过引入辅助变量和拉格朗日乘子将原问题分解为多个子问题然后在各个子问题之间交替迭代求解。在每次迭代中分别固定其他变量更新部分变量并通过乘子的调整来保证子问题之间的一致性。在电 - 气互联系统中的应用将电 - 气互联系统的优化问题按照电力系统和天然气系统进行分解。电力系统和天然气系统分别在本地根据自身的运行约束和部分信息进行优化计算并将结果传递给协调者。协调者利用松弛交替乘子法结合双方传递的信息对全局优化问题进行求解并将更新后的信息反馈给电力系统和天然气系统。通过多次迭代使得电 - 气互联系统逐步收敛到满足协同优化要求的分布式调度方案同时保护了双方的隐私信息。优化调度模型构建⛳️ 运行结果 部分代码function [F,h,failure] robustify(F,h,ops,w)%ROBUSTIFY Derives robust counterpart.%% [Frobust,objrobust,failure] ROBUSTIFY(F,h,options) is used to derive% the robust counterpart of an uncertain YALMIP model.%% min h(x,w)% subject to% F(x,w) () 0 for all w in W%% The constraints and objective have to satisfy a number of conditions for% the robustification to be possible. Please refer to the YALMIP Wiki for% the current assumptions.%% Some options for the robustification strategies can be altered via the% solver tag robust in sdpsettings%% robust.lplp : Controls how linear constraints with affine% parameterization in an uncertainty with polytopic% description is handled. Can be either duality or% enumeration%% robust.auxred: Controls how uncertainty dependent auxiliary variables% are handled% Can be either projection or enumeration (exact),% or none or affine (conservative)%% robust.reducedual Controls if the system equality constraints derived% when using the duality filter should be eliminated,% thus reducing the number of variables, possibly% destroying sparsity .%% robust.polya : Controls the relaxation order of polynomials. If set to% NAN, the polynomials will be eliminated by forcing the% coefficients to zero%% See also UNCERTAIN% Author Johan L鰂berg% $Id: robustify.m,v 1.55 2010-03-10 15:19:05 joloef Exp $failure 0;if nargin 3ops sdpsettings;elseif isempty(ops)ops sdpsettings;endif nargin 4w [];endif nargin1if isa(h,double)h [];endelseh [];end% We keep track of auxilliary generated variablesnInitial yalmip(nvars);% Find the scenario, extract uncertainty model and classifiy variables[UncertainModel,Uncertainty,VariableType,ops] decomposeUncertain(F,h,w,ops);x VariableType.x;w VariableType.w;if isempty(x)error(There are no decision variables in the uncertain model.)endif isempty(UncertainModel.F_xw)error(The uncertainty does not enter the model anywhere.);end% Experimental code for conic-conic caseif ops.robust.coniclp.useconicconic || ((any(is(UncertainModel.F_xw,sdp)) || any(is(UncertainModel.F_xw,socp))) (any(is(Uncertainty.F_w,sdp)) || any(is(Uncertainty.F_w,socp))))SOSModel [];for i 1:length(UncertainModel.F_xw)if any(ismember(depends(UncertainModel.F_xw(i)),getvariables(VariableType.w)))SOSModel [SOSModel, dualtososrobustness(UncertainModel.F_xw(i),Uncertainty.F_w,VariableType.w,VariableType.x,ops.robust.conicconic.tau_degree,ops.robust.conicconic.gamma_degree,ops.robust.conicconic.Z_degree)];else% Misplaced?SOSModel [SOSModel, UncertainModel.F_xw(i)];endend%SOSModel expanded(SOSModel,1);F [SOSModel, UncertainModel.F_x];h UncertainModel.h;h expanded(h,1);F expanded(F,1); % This is actually done already in expandmodel% h expanded(h,1); % But this one has to be done manuallyreturnend% FIXME: SYNC with expandmodel?if ~isempty(UncertainModel.F_x)nv yalmip(nvars);yalmip(setbounds,1:nv,repmat(-inf,nv,1),repmat(inf,nv,1));LU getbounds(UncertainModel.F_x);yalmip(setbounds,1:nv,LU(:,1),LU(:,2));end% At this point, we have to decide on the algorithm we should use for% robustifying the constraints. There are a couple of alternatives,% depending on uncertainty and constraints% 1. Polya: Polynomial uncertainty dependence, simplex uncertainty,% can only be applied on LP constraints% 2. Elimination: Last resort, tries to cancel all nonlinear uncertainties% by setting coefficients to zero% 3. Explicit: Linear uncertainty dependence, box-model uncertainty, can% only be applied on LP constraints% 4. Enumeration: Linear uncertainty dependence, polytopic uncertainty,% arbitrary type of constraints (convex)% 5. Duality: Linear uncertainty dependence, conic uncertainty, can% only be applied on LP constraints% 6. S-procedure Special case, quadratic dependence in elementwise, one% quadratic constraint in W (obsolete)% 7. Conic conic Subsumes S-procedure% Robust modelF_robust ([]);% We begin by checking to see if the user wants to apply Polyas theorem.% If that is the case, search for simplex structures, and apply Polyas.if ~isnan(ops.robust.polya) any(strcmp(Uncertainty.uncertaintyTypes,simplex)) ~ops.robust.forced_enumerationF_polya [];% Recursively apply Polya relaxation w.r.t each simplexfor i find(strcmp(Uncertainty.uncertaintyTypes,simplex))[UncertainModel.F_xw, F_polya] filter_polya(UncertainModel.F_xwF_polya,w(Uncertainty.uncertaintyGroups{i}),ops.robust.polya);end[UncertainModel.F_xw,F_robust] pruneCertain(F_polya,F_robust,UncertainModel.F_xw,w);end% LP constraints with quadratic dependence and quadratic uncertainty region% can be handled tightly using the S-procedureif (all(strcmp(Uncertainty.uncertaintyTypes,2-norm)) | all(strcmp(Uncertainty.uncertaintyTypes,quadratic))) length(Uncertainty.uncertaintyTypes)1 ~ops.robust.forced_enumeration[UncertainModel.F_xw,F_sprocedure] filter_sprocedure(UncertainModel.F_xw,w,Uncertainty.separatedZmodel,ops);F_robust F_robust F_sprocedure;end% There might still be nonlinearities left in the model. These have to be% removed. We remove all terms with w-degree larger than 1[UncertainModel.F_xw,F_elimination] filter_eliminatation(UncertainModel.F_xw,w,1,ops);F_robust F_robust F_elimination;% Equality constraints cannot be part of an uncertain problem. Any% dependence w.r.t w in equalities has to be removedF_eq extractConstraints(UncertainModel.F_xw,equality);UncertainModel.F_xw UncertainModel.F_xw - F_eq;[F_eq_left,F_eliminate_equality] filter_eliminatation(F_eq,w,0,ops);F_robust F_robust F_eliminate_equality F_eq_left;% The problem should now be linear in the uncertainty, with no uncertain% equality constraints. Hence, now we apply explicit maximization,% enumeration or duality-based robustification.% We start with the norm ballsif ~ops.robust.forced_enumerationfor i 1:length(Uncertainty.uncertaintyTypes)if ismember(Uncertainty.uncertaintyTypes{i},{1-norm,2-norm,inf-norm})F_lp extractConstraints(UncertainModel.F_xw,elementwise);UncertainModel.F_xw UncertainModel.F_xw - F_lp;F_flt filter_normball(F_lp,Uncertainty.separatedZmodel{i},x,w(Uncertainty.uncertaintyGroups{i}),w,Uncertainty.uncertaintyTypes{i},ops,VariableType);[UncertainModel.F_xw,F_robust] pruneCertain(F_flt,F_robust,UncertainModel.F_xw,w);endendend% Pick out the uncertain linear equalities and robustify using duality if% user has opted for this or the uncertainty is conic.conic ~isequal(Uncertainty.Zmodel.K.s,0) | ~isequal(Uncertainty.Zmodel.K.q,0);if (conic | isequal(ops.robust.lplp,duality)) ~ops.robust.forced_enumerationF_lp extractConstraints(UncertainModel.F_xw,elementwise);UncertainModel.F_xw UncertainModel.F_xw - F_lp;nv yalmip(nvars);F_filter filter_duality(F_lp,Uncertainty.Zmodel,x,w,ops);F_robust F_robust F_filter;if isa(F_filter,lmi) ops.verbosenewvars nnz(getvariables(F_filter)nv);disp([ - Duality introduced num2str(newvars) variables, num2str(nnz(is(F_filter,equality))) equalities, num2str(nnz(is(F_filter,elementwise))) LP inqualities and num2str(nnz(is(F_filter,sdp))nnz(is(F_filter,socp))) conic constraints]);endend% Robustify remaining uncertain LP/SOCP/SDP constraints and robustify by% enumeration.F_conic extractConstraints(UncertainModel.F_xw,{sdp,socc,elementwise});UncertainModel.F_xw UncertainModel.F_xw - F_conic;[F_temp,enumerationfailed] filter_enumeration(F_conic,Uncertainty.Zmodel,x,w,ops,Uncertainty.uncertaintyTypes,Uncertainty.separatedZmodel,VariableType);if enumerationfailed% Reset to previous stateUncertainModel.F_xw UncertainModel.F_xw F_conic;elseF_robust F_robust F_temp;endif enumerationfailed% Enumeration failed, probably due to lack of MPT. If problem is conic,% we are in trouble. If simple LP, we can resort to duality approachif conicif ops.verbosedisp( - Enumeration of uncertainty polytope failed. Missing Multiparametric Toolbox?)enderror(Enumeration failed (lacking MPT?), and due to conic constraints, duality cannot be used);elseF_lp extractConstraints(UncertainModel.F_xw,elementwise);UncertainModel.F_xw UncertainModel.F_xw - F_lp;nv yalmip(nvars);F_filter filter_duality(F_lp,Uncertainty.Zmodel,x,w,ops);if ops.verboseif isa(F_filter,lmi)disp([ - Duality introduced num2str(yalmip(nvars)-nv) variables, num2str(nnz(is(F_filter,equality))) equalities, num2str(nnz(is(F_filter,elementwise))) LP inqualities and num2str(nnz(is(F_filter,sdp))nnz(is(F_filter,socp))) conic constraints]);endendF_robust F_robust F_filter;endend% If there is anything left now, it means that we do not support it (such% as conic uncertainty in conic constraint)if length(UncertainModel.F_xw) 0if any(~islinear(UncertainModel.F_xw))error(There are some uncertain constraints which cannot be robustified by YALMIP)elseF_robust F_robust UncertainModel.F_xw;endend% Return the robustfied modelF F_robustUncertainModel.F_x;h UncertainModel.h;% The model has been expanded, so we have to remember this (trying to% expand an expanded model leads to nonconvexity error)F expanded(F,1); % This is actually done already in expandmodelh expanded(h,1); % But this one has to be done manuallynNow yalmip(nvars);if nNow nInitial% YALMIP has introduced auxilliary variables% We mark these as auxilliaryyalmip(addauxvariables,nInitial1:nNow);endif ops.verbosedisp(***** Derivation of robust counterpart done ***********************);endfunction [F_xw,F_robust] pruneCertain(F_new,F_robust,F_xw,w);for i 1:length(F_new)if ~isempty(intersect(depends(F_new(i)),depends(w)))F_xw F_xw F_new(i);elseF_robust F_robust F_new(i);endendfunction p indexIn(x,y)if ~isempty(x)for i 1:length(x)p(i) find(x(i)y);endelsep [];endfunction [F_x,F_w,F_xw,VariableType] partitionModel(F,F_original,VariableType);F_x [];F_w [];F_xw [];% x-var w_var aux_xw aux_wif ~(isempty(VariableType.aux_with_w_dependence) isempty(VariableType.aux_with_only_w_dependence))Dependency spalloc(length(F_original),4,length(F));for i 1:length(F_original)varF depends(F_original(i));Dependency(i,1) any(ismember(varF,VariableType.x_variables));Dependency(i,2) any(ismember(varF,VariableType.w_variables));Dependency(i,3) any(ismember(varF,VariableType.aux_with_w_dependence));Dependency(i,4) any(ismember(varF,VariableType.aux_with_only_w_dependence));endLiftedUncertaintiesDescription find(Dependency(:,1) 0 Dependency(:,3)0);if ~isempty(LiftedUncertaintiesDescription)% for i LiftedUncertaintiesDescription(:)% vars depends(F_original(i));% vars intersect(vars,VariableType.aux_with_only_w_dependence);%% endreclassifyAsUncertain depends(F_original(LiftedUncertaintiesDescription));[notused,reclassifyAsUncertain] find(VariableType.Graph(reclassifyAsUncertain,:));reclassifyAsUncertain unique(reclassifyAsUncertain);reclassifyAsUncertain intersect(unique(reclassifyAsUncertain),getvariables(F));VariableType.aux_with_only_w_dependence setdiff(VariableType.aux_with_only_w_dependence,reclassifyAsUncertain);VariableType.w_variables union(VariableType.w_variables,reclassifyAsUncertain);VariableType.aux_with_w_dependence union(VariableType.aux_with_w_dependence,VariableType.aux_with_only_w_dependence);VariableType.aux_with_only_w_dependence [];endend% x-var w_var aux_xw aux_wDependency spalloc(length(F),4,length(F));for i 1:length(F)varF depends(F(i));Dependency(i,1) any(ismember(varF,VariableType.x_variables));Dependency(i,2) any(ismember(varF,VariableType.w_variables));Dependency(i,3) any(ismember(varF,VariableType.aux_with_w_dependence));Dependency(i,4) any(ismember(varF,VariableType.aux_with_only_w_dependence));endpureX find(Dependency*[1;2;4;8] 1);pureW find(Dependency(:,1) 0 Dependency(:,3)0);mixedXW find(Dependency(:,1) | Dependency(:,3));%mixedXW find((Dependency(:,1) | Dependency(:,3));mixedXW setdiff(1:size(Dependency,1),union(pureW,pureX));F_x F(pureX);F_w F(pureW);F_xw F(mixedXW);reclassifyAsUncertain depends(F_w);VariableType.aux_with_only_w_dependence setdiff(VariableType.aux_with_only_w_dependence,reclassifyAsUncertain);VariableType.w_variables union(VariableType.w_variables,reclassifyAsUncertain);function [VariableType,h_fixed,F_xw] reformatObjective(h,F_xw,VariableType)% Some pre-calcx recover(VariableType.x_variables);w recover(VariableType.w_variables);xw [x;w];xind find(ismembcYALMIP(getvariables(xw),getvariables(x)));wind find(ismembcYALMIP(getvariables(xw),getvariables(w)));% Analyze the objective and try to rewrite any uncertainty into the format% assumed by YALMIPif ~isempty(h)[Q,c,f,dummy,nonquadratic] vecquaddecomp(h,xw);Q Q{1};c c{1};f f{1};if nonquadraticerror(Objective can be at most quadratic, with the linear term uncertain);endQ_ww Q(wind,wind);Q_xw Q(xind,wind);Q_xx Q(xind,xind);c_x c(xind);c_w c(wind);if nnz(Q_ww) 0error(Objective can be at most quadratic, with the linear term uncertain);end% Separate certain and uncertain terms, place uncertain terms in the% constraints insteadif is(h,linear)if isempty(intersect(getvariables(w),getvariables(h)))h_fixed h;elsesdpvar tF_xw F_xw (h t);h_fixed t;x [x;t];endelseh_fixed x*Q_xx*x c_x*x f;h_uncertain 2*w*Q_xw*x c_w*w;if ~isa(h_uncertain,double)sdpvar tF_xw F_xw (h_uncertain t);h_fixed h_fixed t;x [x;t];endendelseh_fixed [];endVariableType.x_variables getvariables(x); 参考文献《不确定风功率接入下电-气互联系统的协同经济调度》更多创新智能优化算法模型和应用场景可扫描关注机器学习/深度学习类BP、SVM、RVM、DBN、LSSVM、ELM、KELM、HKELM、DELM、RELM、DHKELM、RF、SAE、LSTM、BiLSTM、GRU、BiGRU、PNN、CNN、XGBoost、LightGBM、TCN、BiTCN、ESN、Transformer、模糊小波神经网络、宽度学习等等均可~方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断组合预测类CNN/TCN/BiTCN/DBN/Transformer/Adaboost结合SVM、RVM、ELM、LSTM、BiLSTM、GRU、BiGRU、Attention机制类等均可可任意搭配非常新颖~分解类EMD、EEMD、VMD、REMD、FEEMD、TVFEMD、CEEMDAN、ICEEMDAN、SVMD、FMD、JMD等分解模型均可~路径规划类旅行商问题TSP、车辆路径问题VRP、MVRP、CVRP、VRPTW等、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划EVRP、 双层车辆路径规划2E-VRP、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻、公交车时间调度、水库调度优化、多式联运优化等等~小众优化类生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划2E-VRP、充电车辆路径规划EVRP、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位、冷链、时间窗、多车场等、选址优化、港口岸桥调度优化、交通阻抗、重分配、停机位分配、机场航班调度、通信上传下载分配优化、微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统BMSSOC/SOH估算粒子滤波/卡尔曼滤波、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进扰动观察法/电导增量法、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化\智能电网分布式能源经济优化调度虚拟电厂能源消纳风光出力控制策略多目标优化博弈能源调度鲁棒优化等等均可~ 无人机应用方面无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划通信方面传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配信号处理方面信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理传输分析去噪、数字信号调制、误码率、信号估计、DTMF、信号检测电力系统方面 微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统BMSSOC/SOH估算粒子滤波/卡尔曼滤波、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进扰动观察法/电导增量法、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化\智能电网分布式能源经济优化调度虚拟电厂能源消纳风光出力控制策略多目标优化博弈能源调度鲁棒优化原创改进优化算法适合需要创新的同学原创改进2025年的波动光学优化算法WOO以及三国优化算法TKOA、白鲸优化算法BWO等任意优化算法均可保证测试函数效果一般可直接核心告诫读者和自己第一科学态度。历史学是一门科学要学会做历史研究就得有科学态度。科学态度不是与生俱来的必须认真培养关键是培养我们在研究中认真负责一丝不苟的精神。第二献身精神。从事历史研究就像从事其他任何科学研究一样要有一种为科学研究而献身的精神要热爱我们的研究事业要有潜心从事这项工作的意志。没有献身精神当然做不好科研工作。只想拿一个学位那是很难学好做研究的。要拿学位这一点可以理解但我们读书是为了自己获得真才实学。有了真才实学将来不论做什么工作都是有用的。当然学位也是要的但关键的是学问而不是学位。第三查阅收集学术信息、资料的能力。青年学生要从事学术研究就要培养能熟练地掌握查阅搜集学术信息、资料的能力。例如学习与研究英帝国史就得了解国内外有关这个专业的基本情况了解有关资料情况。像你们在北京地区学习至少要大致了解北京地区有关英帝国史的中英文资料熟悉与专业密切相关的主要图书馆了解馆藏情况。这就需要经常去图书馆。我们这个专业不需要到田间考察到工厂调研但要去图书馆去图书馆就是我们的调查研究。熟悉有关图书馆的情况是我们学习的一部分。今天网络飞速发展掌握网上查阅信息的技巧是非常必要的。第四处理资料的能力。搜集的资料会越来越多怎样安排它们也是一门学问。各学科各个研究人员的方式可能会有所不同但总的原则是要有条理便于记忆便于查阅。第五对资料的鉴别意识与鉴别能力。我们在使用研究资料时不能拿着就用要有意识鉴别一下材料是否可靠什么样的材料更有价值。读书时也不是拿着什么书就通读到底。有的书翻一翻即可有的书则需认真读。区别哪些书翻一翻即可哪些书得认真读也不是一件容易的事青年学生不是一下子就能做到这一点的需逐渐培养这种能力。还有一点就是要学会使用计算机能比较熟练地进行文字处理。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2569133.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…
wordpress后台更新后 前端没变化的解决方法
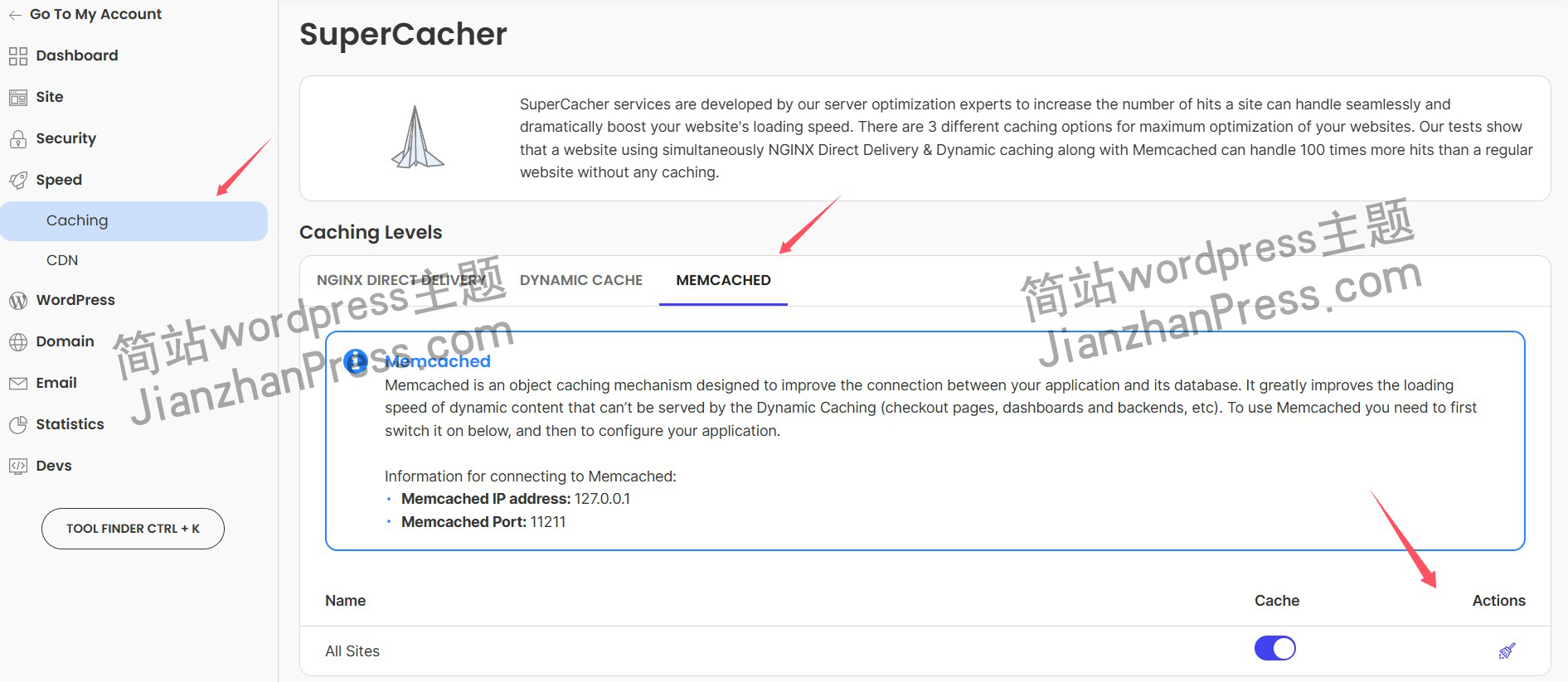
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。
不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…

网络编程(Modbus进阶)
思维导图 Modbus RTU(先学一点理论)
概念 Modbus RTU 是工业自动化领域 最广泛应用的串行通信协议,由 Modicon 公司(现施耐德电气)于 1979 年推出。它以 高效率、强健性、易实现的特点成为工业控制系统的通信标准。 包…

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下:
【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理:
原因:
IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…

利用最小二乘法找圆心和半径
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构
struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {}
}; // 最小二乘法求圆心和半径 …

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明
如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看
说明:假设每台服务器已…

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
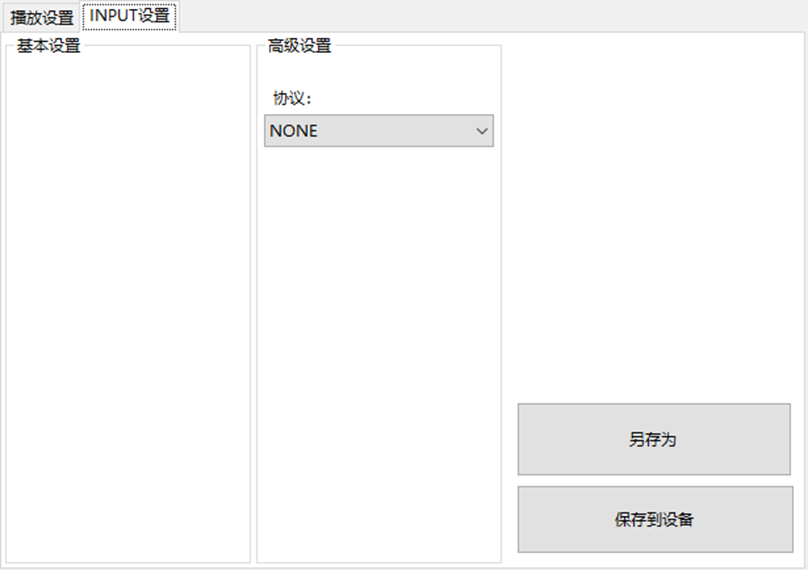
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。
L…

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。
C版本:
class Solution {
public:int maxDifference(string s) {int a[26]…
【大模型RAG】拍照搜题技术架构速览:三层管道、两级检索、兜底大模型
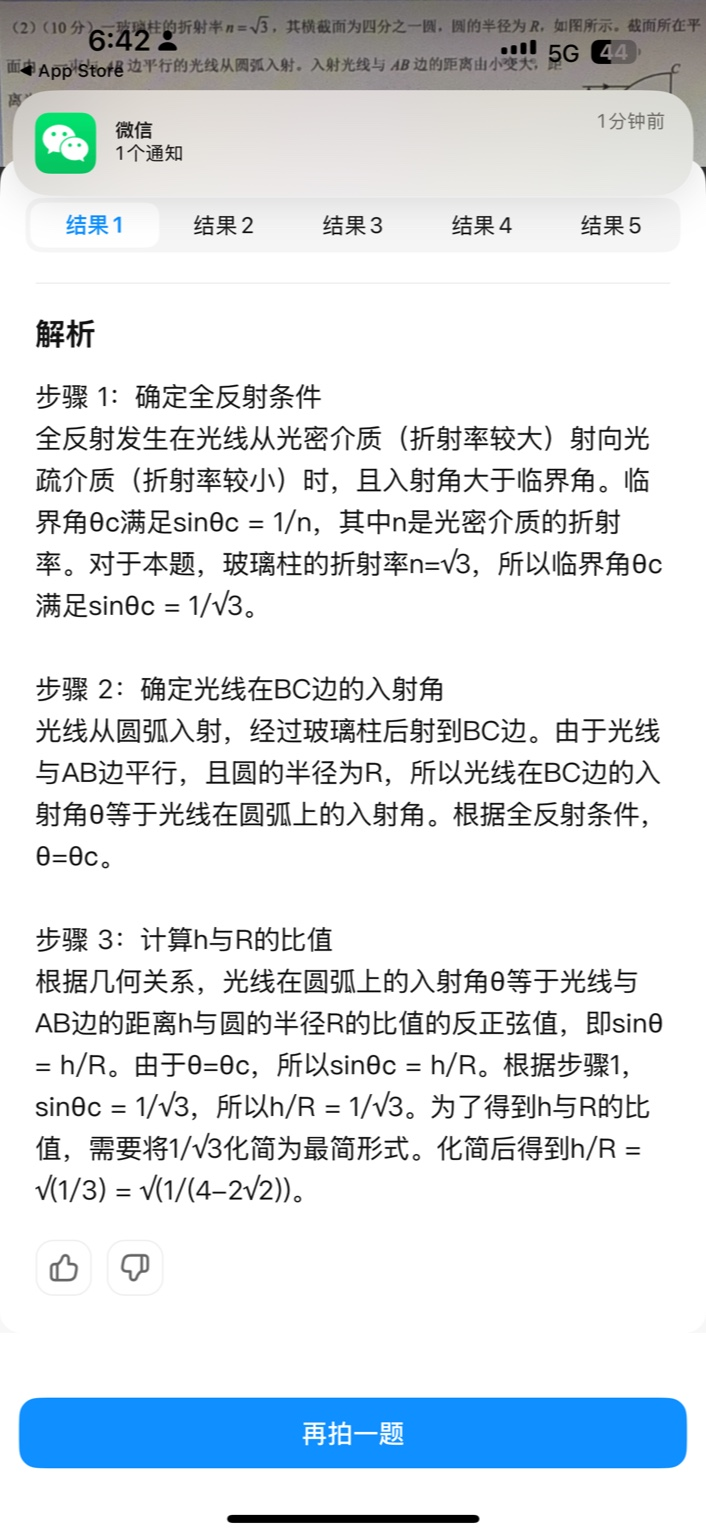
摘要
拍照搜题系统采用“三层管道(多模态 OCR → 语义检索 → 答案渲染)、两级检索(倒排 BM25 向量 HNSW)并以大语言模型兜底”的整体框架: 多模态 OCR 层 将题目图片经过超分、去噪、倾斜校正后,分别用…

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明:
一、缓存处理的核…

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技
代表标的:御银股份、雄帝科技
驱动…

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍
Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因:
背景:
一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…

未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?
编辑:陈萍萍的公主一点人工一点智能 未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?RWM通过双自回归机制有效解决了复合误差、部分可观测性和随机动力学等关键挑战,在不依赖领域特定归纳偏见的条件下实现了卓越的预测准…

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接
服务端代码
#include <sys/socket.h>
#include <sys/types.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <arpa/inet.h>
#include <pthread.h>
…

华为云AI开发平台ModelArts
华为云ModelArts:重塑AI开发流程的“智能引擎”与“创新加速器”!
在人工智能浪潮席卷全球的2025年,企业拥抱AI的意愿空前高涨,但技术门槛高、流程复杂、资源投入巨大的现实,却让许多创新构想止步于实验室。数据科学家…
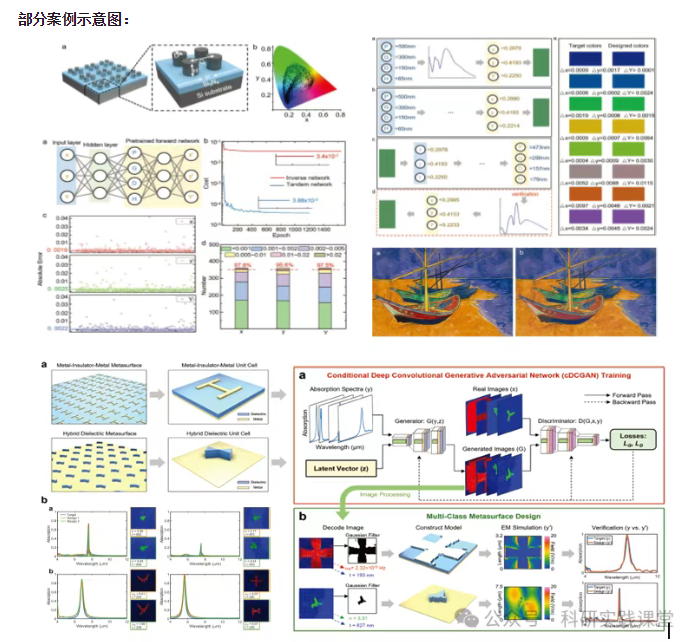
深度学习在微纳光子学中的应用
深度学习在微纳光子学中的主要应用方向
深度学习与微纳光子学的结合主要集中在以下几个方向:
逆向设计 通过神经网络快速预测微纳结构的光学响应,替代传统耗时的数值模拟方法。例如设计超表面、光子晶体等结构。
特征提取与优化 从复杂的光学数据中自…