神经网络常见层Numpy封装参考(4):优化器
news2026/5/2 19:12:23
目录前置层优化器SGD优化器Adam优化器测试演示完整代码下载 神经网络常见层Numpy封装参考 - 常见层前置层- 神经网络常见层Numpy封装参考1损失层- 神经网络常见层Numpy封装参考2线性层- 神经网络常见层Numpy封装参考3激活层优化器SGD优化器classSGD:SGD优化器支持动量和权重衰减def__init__(self,params:List[Parameter],lr:float0.01,momentum:float0.0,weight_decay:float0.0,nesterov:boolFalse): Args: params: 参数列表 lr: 学习率 momentum: 动量因子 weight_decay: 权重衰减系数 nesterov: 是否使用Nesterov动量 self.paramsparams self.lrlr self.momentummomentum self.weight_decayweight_decay self.nesterovnesterov self.state{}# 存储每个参数的状态如动量缓冲区defstep(self):更新参数foridx,paraminenumerate(self.params):ifparam.gradisNone:continue# 获取梯度gradparam.grad.copy()# 权重衰减ifself.weight_decay!0:gradgradself.weight_decay*param.data# 获取或创建动量缓冲区ifself.momentum!0:ifidxnotinself.state:self.state[idx]{momentum_buffer:np.zeros_like(param.data)}momentum_bufferself.state[idx][momentum_buffer]# 更新动量缓冲区momentum_bufferself.momentum*momentum_buffer-self.lr*gradifself.nesterov:# Nesterov动量: 使用校正后的梯度param.dataself.momentum*momentum_buffer-self.lr*gradelse:param.datamomentum_buffer self.state[idx][momentum_buffer]momentum_bufferelse:# 标准SGDparam.data-self.lr*graddefzero_grad(self):forparaminself.params:param.zero_grad()def__repr__(self):returnself.__class__.__name__()Adam优化器classAdam:Adam优化器支持权重衰减def__init__(self,params:List[Parameter],lr:float0.001,betas:tuple(0.9,0.999),eps:float1e-8,weight_decay:float0.0): Args: params: 参数列表 lr: 学习率 betas: 动量衰减系数 (beta1, beta2) eps: 数值稳定项 weight_decay: 权重衰减系数 self.paramsparams self.lrlr self.betasbetas self.epseps self.weight_decayweight_decay self.state{}# 存储每个参数的状态一阶动量、二阶动量、时间步self.t0# 全局时间步用于偏差校正defstep(self):更新参数self.t1# 每调用一次 step时间步加 1beta1,beta2self.betasforidx,paraminenumerate(self.params):ifparam.gradisNone:continue# 获取梯度gradparam.grad.copy()# 权重衰减L2 正则化ifself.weight_decay!0:gradgradself.weight_decay*param.data# 初始化状态如果尚未初始化ifidxnotinself.state:self.state[idx]{m:np.zeros_like(param.data),# 一阶动量v:np.zeros_like(param.data)# 二阶动量}# 取出动量缓冲区mself.state[idx][m]vself.state[idx][v]# 更新一阶动量带指数衰减mbeta1*m(1-beta1)*grad# 更新二阶动量带指数衰减vbeta2*v(1-beta2)*(grad**2)# 偏差校正m_hatm/(1-beta1**self.t)v_hatv/(1-beta2**self.t)# 更新参数param.data-self.lr*m_hat/(np.sqrt(v_hat)self.eps)# 保存更新后的动量self.state[idx][m]m self.state[idx][v]vdefzero_grad(self):清零所有参数的梯度forparaminself.params:param.zero_grad()def__repr__(self):返回优化器的字符串表示returnself.__class__.__name__()测试%matplotlib inline# 数据点满足非线性关系xnp.linspace(0,1,500).reshape(-1,1)y2*x**30.25*np.random.randn(500).reshape(-1,1)plt.scatter(x,y)plt.show()# 定义模型和损失函数modelSequential(Linear(1,10),Tanh(),Linear(10,1),)criterionMSELoss()# 定义优化器optimizer1SGD(paramsmodel.parameters(),lr1e-2,momentum0.8,weight_decay0)optimizer2Adam(paramsmodel.parameters(),lr1e-2)# 训练流程forepochinrange(1000):y_predmodel(x)loss,gradcriterion(y_pred,y)model.backward(grad)optimizer2.step()optimizer2.zero_grad()if(epoch%2000):print(loss)1.1548328265032672 0.11623908399811281 0.10961048087231211 0.07929787391344985 0.06122113711571879%matplotlib inline# 检验拟合效果x_plotnp.linspace(0,1.2,50).reshape(-1,1)plt.plot(x_plot,model(x_plot),cr)plt.scatter(x,y)plt.show()演示frommpl_toolkits.mplot3dimportAxes3Dimportcopyfromtqdmimporttqdmclassgrad_descent_demo:def__init__(self,optimizers:List,surface_type:strlinear,init_pos:int0): Args: optimizers: 传入需要模拟的优化器列表定义时参数设为空数组即可 surface_type: 3D表面类型可选linear和unlinear init_pos: 路径点初始位置可选0~3 self.optimizersoptimizers# 使用MSE损失self.criterionMSELoss()# 最优解self.target_w118self.target_w2-8# 100个二维数据self.Xnp.random.randn(100,2)# 线性目标值self.y(self.target_w1*self.X[:,0]self.target_w2*self.X[:,1]).reshape(-1,1)# 线性层if(surface_typelinear):modelSequential(Linear(2,1,biasFalse),)# 模拟前向传播过程self.forward_fnlambdaw1,w2:(w1*self.X[:,0]w2*self.X[:,1]).reshape(-1,1)# 线性层Tanh层elif(surface_typeunlinear):modelSequential(Linear(2,1,biasFalse),Tanh(),)self.forward_fnlambdaw1,w2:np.tanh(w1*self.X[:,0]w2*self.X[:,1]).reshape(-1,1)else:raiseValueError(Unsupported surface type!)# 每个优化器独立创建一个模型self.models[copy.deepcopy(model)foroptiminself.optimizers]# 为每个优化器关联对应的模型fori,optiminenumerate(self.optimizers):optim.paramsself.models[i].parameters()# 最优损失self.target_loss,_criterion(self.forward_fn(self.target_w1,self.target_w2),self.y)# 初始位置if(init_pos0):passelif(init_pos1):formodelinself.models:model[0].weight.datanp.array([[-5.0,7.0]])elif(init_pos2):formodelinself.models:model[0].weight.datanp.array([[-8.0,-20.0]])elif(init_pos3):formodelinself.models:model[0].weight.datanp.array([[2.0,-10.0]])else:raiseValueError(Unidentified initial position!)# 预计算损失曲面网格w1_rangenp.linspace(-15,50,25)w2_rangenp.linspace(-30,15,25)self.W1,self.W2np.meshgrid(w1_range,w2_range)self.Znp.zeros_like(self.W1)# 取出网格中的每个数据点计算损失foriinrange(self.W1.shape[0]):forjinrange(self.W1.shape[1]):y_predself.forward_fn(self.W1[i,j],self.W2[i,j])loss,_self.criterion(y_pred,self.y)self.Z[i,j]loss# 模拟阶段用于储存路径点self.w1_dict{}self.w2_dict{}self.loss_dict{}defstep(self,epoches:int60): 模拟梯度下降产生路径点 self.epochesepoches# 遍历每个模型和优化器fori,(model,optimizer)inenumerate(zip(self.models,self.optimizers)):w1_arr[]w2_arr[]loss_arr[]forepochintqdm(range(epoches)):# 训练流程y_predmodel(self.X)loss,gradself.criterion(y_pred,self.y)model.backward(grad)optimizer.step()optimizer.zero_grad()# 储存w1_arr.append(model[0].weight.data[0][0].copy())w2_arr.append(model[0].weight.data[0][1].copy())loss_arr.append(loss)# 每个索引储存一个优化器和对应模型的路径数据self.w1_dict[i]w1_arr self.w2_dict[i]w2_arr self.loss_dict[i]loss_arr# 绘制模拟图defplot(self): 绘制路径点动画 if(self.w1_dict{}):raiseValueError(Please run step() first!)# 开启交互模式plt.ion()# 创建固定图形对象figplt.figure(figsize(6,6))axfig.add_subplot(111,projection3d)# 绘制损失曲面ax.plot_surface(self.W1,self.W2,self.Z,cmapcoolwarm,alpha0.8,linewidth0)# 绘制最低点ax.scatter(self.target_w1,self.target_w2,self.target_loss,cg,s2)# 绘制文字说明ax.set_xlabel(w1)ax.set_ylabel(w2)ax.set_zlabel(MSE Loss)plt.show()# 为每个优化器创建一个路径点和路径线points[]lines[]colors[red,blue,green,orange,purple,brown,pink,gray]foridx,(w1_key,w2_key,loss_key)inenumerate(zip(self.w1_dict.keys(),self.w2_dict.keys(),self.loss_dict.keys())):# 图例说明直接获取优化器类名labelstr(self.optimizers[idx])[:-2]# 循环使用颜色列表colorcolors[idx%len(colors)]# 路径点和路径线point,ax.plot(self.w1_dict[w1_key][0],self.w2_dict[w2_key][0],self.loss_dict[loss_key][0],o,markersize4,colorcolor)line,ax.plot(self.w1_dict[w1_key][0],self.w2_dict[w2_key][0],self.loss_dict[loss_key][0],colorcolor,labellabel)# 储存points.append(point)lines.append(line)# 添加图例axplt.gca()ax.legend()# 更新运动轨迹forepochinrange(self.epoches):# 更新标题ax.set_title(fCurrent epoch:{epoch1}/{self.epoches},fontsize12)# 取出对应的路径数据和路径点forw1_key,w2_key,loss_key,point,lineinzip(self.w1_dict.keys(),self.w2_dict.keys(),self.loss_dict.keys(),points,lines):# 更新路径点point.set_xdata([self.w1_dict[w1_key][epoch]])point.set_ydata([self.w2_dict[w2_key][epoch]])point.set_3d_properties([self.loss_dict[loss_key][epoch]])# 更新路径线line.set_xdata(self.w1_dict[w1_key][:epoch])line.set_ydata(self.w2_dict[w2_key][:epoch])line.set_3d_properties(self.loss_dict[loss_key][:epoch])# 重新绘图plt.draw()# 暂停以实现动画效果plt.pause(0.05)# plt.savefig(imgstr(epoch).png)# 关闭交互模式plt.ioff()%matplotlib tk# 模拟三种优化器optimizer1SGD(params[],lr1e-1,momentum0,weight_decay0.6)optimizer2SGD(params[],lr1e-1,momentum0.92,weight_decay0)optimizer3Adam(params[],lr1,betas(0.9,0.99))# 初始化gddgrad_descent_demo([optimizer1,optimizer2,optimizer3],surface_typeunlinear,init_pos2)# 模拟gdd.step(epoches60)# 绘图gdd.plot()100%|███████████████████████████████████████████████████████████████████████████████| 60/60 [00:0000:00, 10899.49it/s] 100%|███████████████████████████████████████████████████████████████████████████████| 60/60 [00:0000:00, 13318.77it/s] 100%|███████████████████████████████████████████████████████████████████████████████| 60/60 [00:0000:00, 30009.33it/s]下一篇 - 神经网络常见层Numpy封装参考5其他层
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2552095.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…
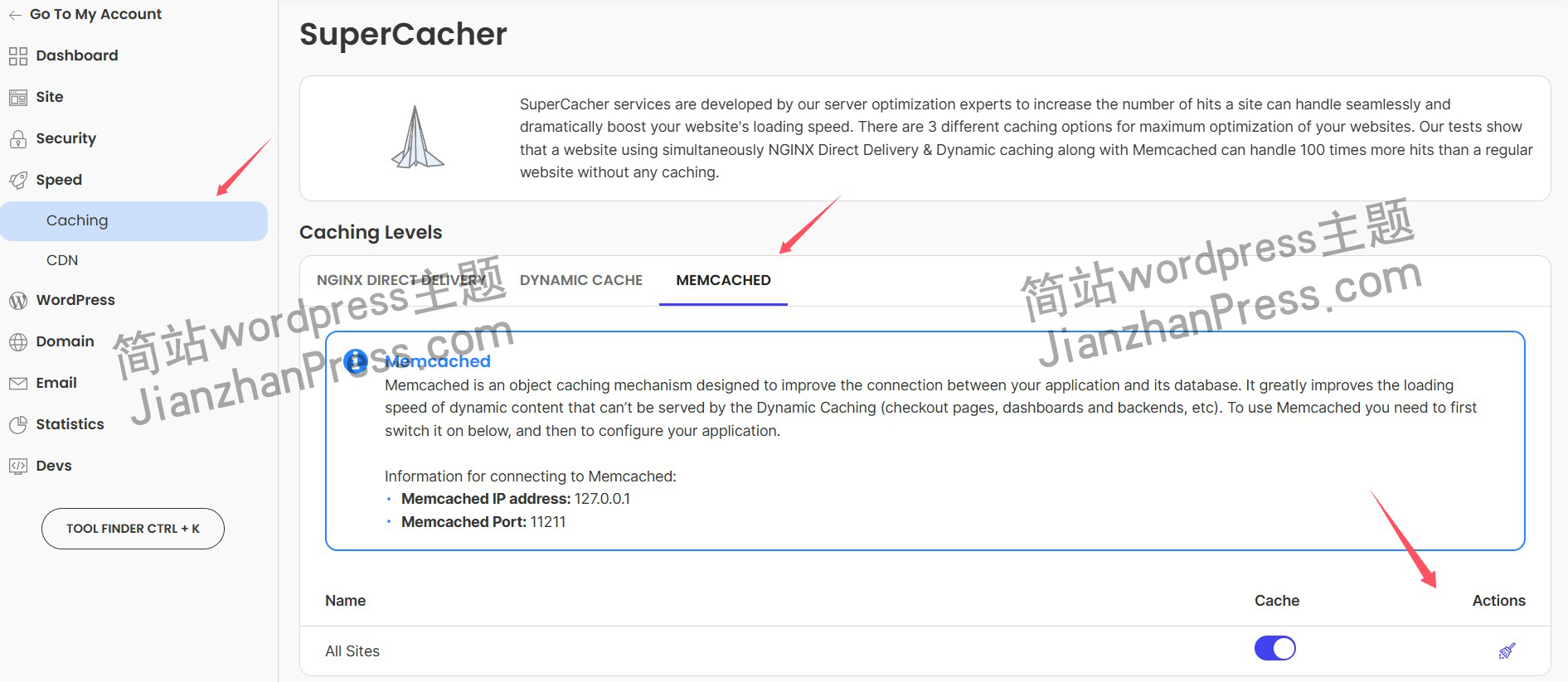
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。
不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…

网络编程(Modbus进阶)
思维导图 Modbus RTU(先学一点理论)
概念 Modbus RTU 是工业自动化领域 最广泛应用的串行通信协议,由 Modicon 公司(现施耐德电气)于 1979 年推出。它以 高效率、强健性、易实现的特点成为工业控制系统的通信标准。 包…

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下:
【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理:
原因:
IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…

利用最小二乘法找圆心和半径
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构
struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {}
}; // 最小二乘法求圆心和半径 …

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明
如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看
说明:假设每台服务器已…

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…
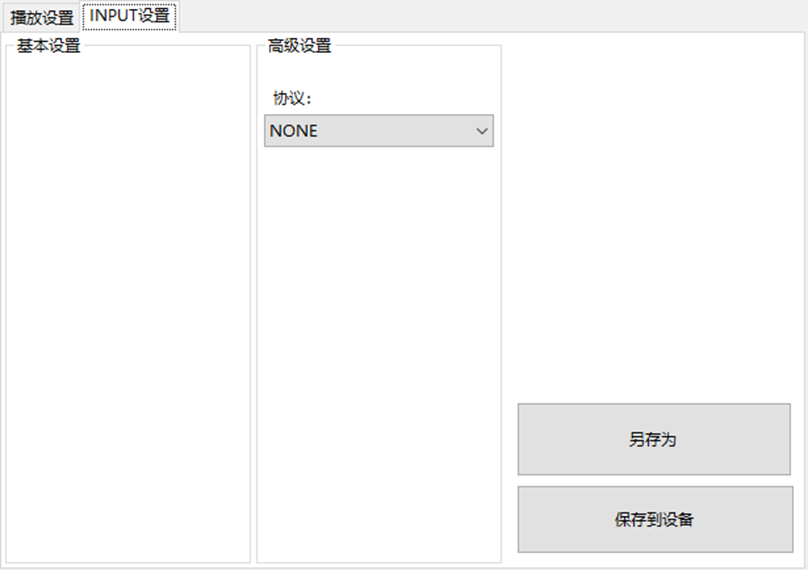
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。
L…

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。
C版本:
class Solution {
public:int maxDifference(string s) {int a[26]…
【大模型RAG】拍照搜题技术架构速览:三层管道、两级检索、兜底大模型
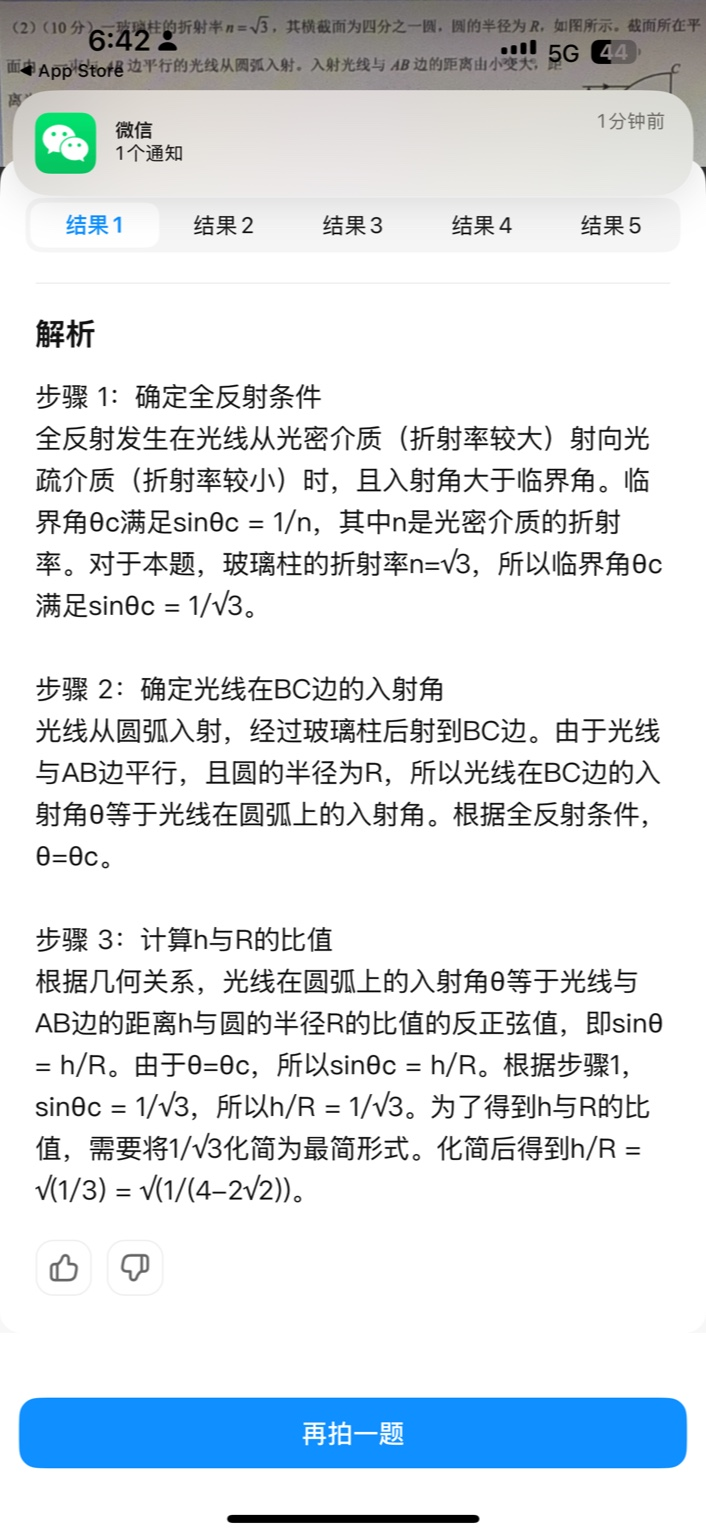
摘要
拍照搜题系统采用“三层管道(多模态 OCR → 语义检索 → 答案渲染)、两级检索(倒排 BM25 向量 HNSW)并以大语言模型兜底”的整体框架: 多模态 OCR 层 将题目图片经过超分、去噪、倾斜校正后,分别用…

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明:
一、缓存处理的核…

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技
代表标的:御银股份、雄帝科技
驱动…

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍
Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因:
背景:
一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…

未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?
编辑:陈萍萍的公主一点人工一点智能 未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?RWM通过双自回归机制有效解决了复合误差、部分可观测性和随机动力学等关键挑战,在不依赖领域特定归纳偏见的条件下实现了卓越的预测准…

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接
服务端代码
#include <sys/socket.h>
#include <sys/types.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <arpa/inet.h>
#include <pthread.h>
…

华为云AI开发平台ModelArts
华为云ModelArts:重塑AI开发流程的“智能引擎”与“创新加速器”!
在人工智能浪潮席卷全球的2025年,企业拥抱AI的意愿空前高涨,但技术门槛高、流程复杂、资源投入巨大的现实,却让许多创新构想止步于实验室。数据科学家…
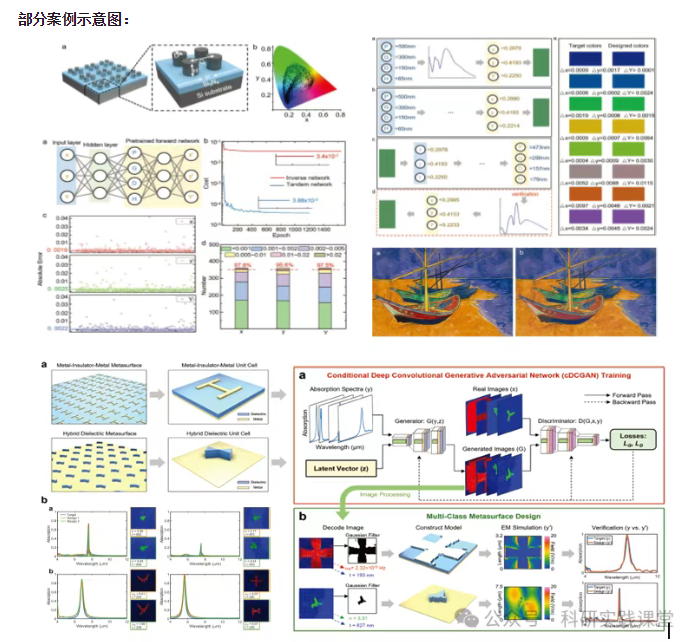
深度学习在微纳光子学中的应用
深度学习在微纳光子学中的主要应用方向
深度学习与微纳光子学的结合主要集中在以下几个方向:
逆向设计 通过神经网络快速预测微纳结构的光学响应,替代传统耗时的数值模拟方法。例如设计超表面、光子晶体等结构。
特征提取与优化 从复杂的光学数据中自…