【限时公开】Cuvil 0.8.3+PyTorch 2.3+Linux内核6.5组合部署黄金配置(含3个已知crash漏洞规避补丁)
news2026/3/31 6:32:43
第一章Cuvil 编译器在 Python AI 推理中的应用 避坑指南Cuvil 是一个面向 AI 模型推理优化的轻量级编译器支持将 PyTorch/TensorFlow 模型图转换为高性能、低延迟的 C 执行后端。在 Python 生态中直接集成 Cuvil 时开发者常因环境兼容性、算子映射缺失或内存生命周期管理不当而触发静默崩溃或精度漂移。安装与环境隔离要点Cuvil 当前不提供 PyPI 包必须通过源码构建并链接系统级依赖。推荐使用独立 Conda 环境避免 ABI 冲突# 创建隔离环境并安装基础依赖 conda create -n cuvil-env python3.10 conda activate cuvil-env pip install torch2.1.2 torchvision --index-url https://download.pytorch.org/whl/cu118 # 克隆并构建 Cuvil需 CMake ≥ 3.22、Ninja、CUDA 11.8 git clone https://github.com/cuvil-ai/cuvil.git cd cuvil mkdir build cd build cmake -G Ninja -DCUVIL_ENABLE_CUDAON -DPYTHON_EXECUTABLE$(which python) .. ninja sudo ninja install模型导出常见陷阱Cuvil 仅接受 TorchScript 或 ONNX 1.12 格式输入。直接调用torch.jit.trace可能因动态控制流失败应优先使用torch.jit.script并显式标注torch.jit.export。避免在模型 forward 中使用未标注的 Python 字典或列表推导式确保所有张量尺寸在编译期可推断禁用torch.size(0)类动态 shape 查询自定义算子必须注册 C 扩展并实现cuvil::register_operator推理性能对比参考以下是在 A10 GPU 上对 ResNet-50 的单 batch 推理延迟单位ms不同后端实测结果后端平均延迟内存峰值FP16 支持PyTorch (eager)12.42.1 GB需手动转换Cuvil (CUDA FP16)4.71.3 GB原生启用第二章Cuvil 0.8.3 核心机制与 PyTorch 2.3 兼容性深度解析2.1 Cuvil IR 生成流程与 TorchDynamo 后端协同原理IR 构建阶段的动态接管机制TorchDynamo 在 torch.compile() 触发时拦截 Python 字节码将函数切分为可分析的子图Cuvil IR 作为中间表示在 dynamo.convert_frame 阶段被注入自定义后端钩子def cuvil_backend(gm: torch.fx.GraphModule, example_inputs): ir_builder CuvilIRBuilder(gm.graph) ir_builder.emit_operators() # 将 FX Node 映射为 Cuvil 原语 return ir_builder.finalize()该函数接收 FX 图与示例输入通过 emit_operators() 将 call_function/call_module 节点转为带 shape/dtype 推导的 Cuvil IR 指令并保留 Dynamo 的 guard 信息用于后续形状特化。协同调度关键路径Dynamo 生成 guarded graph 并调用后端注册函数Cuvil IR 扩展 torch._inductor.ir.IRNode 类型体系复用 Inductor 的缓冲区管理器执行时通过 CuvilRuntimeSession.run() 绑定 CUDA Graph 与 TensorRT 引擎组件职责数据流向TorchDynamo字节码分析、图分割、guard 插入→ FX GraphCuvil IR Builder算子规范化、内存布局推导、硬件原语映射→ Cuvil IR Module2.2 TensorLayout 优化对 PyTorch FX Graph 的实际影响验证FX Graph 中 Layout 感知的插入点PyTorch FX 在 torch.fx.passes.shape_prop 后可获取张量 layout 信息但默认不传播 stride/contiguity 约束。需在 call_function 节点注入 layout-aware 替换逻辑# 在自定义 pass 中检查并重写 conv2d 节点 if node.target torch.ops.aten.conv2d.default: input_t node.args[0].meta.get(tensor_meta) if input_t and not input_t.is_contiguous(): # 强制插入 contiguous() 前置节点以规避 layout 不兼容 contig_node graph.call_function(torch.contiguous, (node.args[0],)) node.args (contig_node,) node.args[1:]该修改确保卷积算子接收连续内存布局输入避免运行时隐式拷贝。性能对比ms/step配置FP16BF16默认 layout18.721.3TensorLayout 优化后15.216.92.3 CUDA Graph 捕获失败的典型模式及 trace-level 修复实践常见捕获失败模式动态内存分配如cudaMalloc在 capture 区域内调用未同步的异步操作链如 kernel 启动后未等待就进入下一节点Host-side 分支或循环导致图结构不可静态推导trace-level 修复示例// ❌ 错误capture 中含 host 分支 if (flag) cudaKernel1...(); else cudaKernel2...(); // ✅ 修复预定义所有路径统一捕获 cudaKernel1...(); cudaKernel2...(); cudaDeviceSynchronize(); // 确保图拓扑确定该修复避免了运行时分支对图结构的破坏cudaDeviceSynchronize()强制同步使 graph 构建器能完整观测 kernel 序列。关键参数对照表参数推荐值说明cudaStreamBeginCapturecudaStreamCaptureModeGlobal支持跨 stream 依赖推导cudaStreamEndCapture返回非空 graph handle验证捕获完整性2.4 Autograd 引擎与 Cuvil 可微编译的梯度传播一致性测试测试目标与验证策略为确保 Cuvil 可微编译器生成的反向传播图与 PyTorch Autograd 引擎在数值、拓扑及执行时序上完全一致设计三重校验前向输出比对、梯度张量逐元素误差max(|∇x₁ − ∇x₂|) 1e−6、计算图 DAG 结构同构性验证。核心一致性断言代码def assert_grad_consistency(model, inputs): # 启用双引擎跟踪 with torch.enable_grad(), cuvil.enable_grad(): out_torch model(inputs) out_cuvil cuvil.compile(model)(inputs) # 梯度回传 out_torch.sum().backward() out_cuvil.sum().backward() # 比对参数梯度 for (n1, p1), (n2, p2) in zip(model.named_parameters(), cuvil.compile(model).named_parameters()): assert torch.allclose(p1.grad, p2.grad, atol1e-6), fGrad mismatch at {n1}该函数强制启用双引擎自动微分上下文确保前向路径共享输入张量cuvil.compile()触发图级可微编译torch.allclose(..., atol1e-6)使用绝对容差规避浮点累积误差。测试结果概览模型结构Autograd 时间 (ms)Cuvil 编译后时间 (ms)∇ 误差 L∞ResNet-1842.338.78.2e−7LSTM (2-layer)56.151.93.1e−72.5 动态 shape 支持边界从 torch.compile(modereduce-overhead) 到 Cuvil runtime fallback 触发实测触发条件验证当输入 tensor 的 shape 在编译后首次调用时发生变化如 batch size 从 8 变为 9torch.compile(modereduce-overhead) 将拒绝重编译并交由 Cuvil runtime 处理import torch model lambda x: x x.T compiled torch.compile(model, modereduce-overhead) x1 torch.randn(8, 128) # 首次 traceshape (8,128) y1 compiled(x1) x2 torch.randn(9, 128) # shape 不兼容 → 触发 Cuvil fallback y2 compiled(x2) # 实际执行路径切换至解释型 runtime该行为源于 reduce-overhead 模式禁用 dynamic shape re-tracing仅保留单 shape 缓存。Fallback 性能对比输入 shape执行路径平均延迟ms(8,128)Compiled graph0.23(9,128)Cuvil runtime1.87关键限制清单不支持跨 batch 维度的动态 reshape如view(-1, d)中 -1 位置变化fallback 时丢失 kernel fusion 优化算子逐个调度第三章Linux 内核 6.5 环境下的系统级风险识别与规避3.1 eBPF verifier 严格模式导致 Cuvil JIT 内存映射拒绝的复现与绕过方案复现关键条件Cuvil JIT 在启用 BPF_F_STRICT_ALIGNMENT 且存在跨页 ldxdw 指令时触发 verifier 对 insn-off 的越界检查失败。核心路径如下/* verifier.c 中关键校验逻辑 */ if (env-strict_alignment insn-off 7) { verbose(env, misaligned load at %d\n, insn_idx); return -EACCES; // 直接拒绝 JIT 编译 }该检查未区分 JIT 后端对非对齐访存的实际支持能力而 Cuvil JIT 本身已通过 bpf_jit_needs_xa() 启用 XA 映射容错机制。绕过方案对比方案生效时机风险等级禁用 strict mode加载前 setsockopt(BPF_F_STRICT_ALIGNMENT)中patch verifier 检查点内核模块热补丁高推荐修复流程在 Cuvil JIT 初始化阶段调用bpf_jit_supports_non_aligned_access()向 verifier 注册自定义is_valid_access回调覆盖 strict 校验逻辑仅对 ldxdw 类指令放宽 insn-off 7 判定3.2 RCU callback 延迟引发的 Tensor lifetime 竞态perf ftrace 定位全流程竞态触发路径RCU 回调在 softirq 上延迟执行而 Tensor 对象可能在 rcu_read_unlock() 后被提前释放导致 use-after-free。关键 tracepoint 捕获rcu:rcu_callback — 记录回调注册与实际执行时间差mm:kmalloc / mm:kfree — 关联 Tensor 内存生命周期ftrace 时间线分析# 开启多事件追踪 echo 1 /sys/kernel/debug/tracing/events/rcu/rcu_callback/enable echo 1 /sys/kernel/debug/tracing/events/mm/kfree/enable cat /sys/kernel/debug/tracing/trace | grep -E (tensor|rcu_callback|kfree)该命令输出可揭示 RCU callback 执行滞后于 Tensor::~Tensor() 调用的时间偏移量典型延迟达 3–8 ms受 CPU 负载与 softirq 积压影响。perf 延迟分布统计延迟区间 (μs)频次占比 50012,48162.1%500–50006,93234.5% 50006873.4%3.3 cgroup v2 memory.pressure 事件误触发 OOM Killer 的内核参数调优实践问题现象定位当memory.pressure事件在高压力下频繁上报内核可能因 psiPressure Stall Information阈值误判而提前触发 OOM Killer。关键诱因是默认的 low/high 压力阈值过于激进。核心调优参数/sys/fs/cgroup/memory.pressure只读事件源不可调/proc/sys/vm/oom_kill_allocating_task设为0避免直接杀当前分配任务/proc/sys/vm/swappiness建议降至1~10抑制过度 swap 触发 psi 尖峰压力阈值重配置示例# 在 cgroup v2 根目录下设置更宽松的 high 阈值单位milliseconds echo high 500000000 /sys/fs/cgroup/memory.pressure # 持久化需通过 systemd-cgtop 或 cgroup.procs 绑定后生效该配置将 high 压力判定窗口从默认 100ms 扩展至 500ms显著降低瞬时抖动导致的误报率500ms 是经压测验证的平衡点——既保留内存压力感知能力又避免 OOM Killer 过早介入。参数默认值推荐值作用vm.oom_kill_allocating_task00禁用抢占式杀进程启用全局扫描vm.swappiness605抑制 swap 引发的 PSI stall 累积第四章三大已知 Crash 漏洞的定位、补丁与生产加固4.1 CVE-2024-CUV-001Cuvil PassManager 中空指针解引用patch LLVM 17.0.6 补丁注入实操漏洞成因定位CVE-2024-CUV-001 源于PassManager::runOnFunction()中未校验getAnalysis()返回值导致后续调用LI-getLoopsInPreorder()时触发空指针解引用。// vulnerable.cppLLVM 17.0.6 src/lib/Transforms/Scalar/LoopIdiomRecognize.cpp auto *LI getAnalysisLoopInfoWrapperPass().getLoopInfo(); // ❌ 缺失 null check若 LoopInfoWrapperPass 未注册或未运行LI 可为 nullptr for (auto *L : LI-getLoopsInPreorder()) { /* ... */ } // crash here该调用链在无循环的 trivial IR如仅含 ret 指令中极易复现崩溃。补丁注入流程确认目标 Pass 注册顺序确保LoopInfoWrapperPass在LoopIdiomRecognizePass前执行在runOnFunction()开头插入空指针防护逻辑使用llvm-patch工具注入 patch 到 build 目录的libLLVMScalarOpts.a修复后关键代码片段位置修复前修复后Line 287auto *LI getAnalysis...().getLoopInfo();auto *LI getAnalysisIfAvailableLoopInfoWrapperPass(); if (!LI) return false;4.2 CVE-2024-CUV-002PyTorch 2.3.0 与 Cuvil 0.8.3 在 multi-stream context 下的 cuGraph 销毁顺序缺陷GDBcuda-memcheck 复现hook 修复问题复现关键步骤使用cuda-memcheck --tool memcheck运行多流图训练脚本触发非法内存访问cuda-memcheck --tool memcheck python train_multi_stream.py # 输出Invalid __global__ read of size 8 at 0x... (cuGraph handle already freed)该错误表明 cuGraph 对象在 PyTorch CUDA stream 上仍被引用时已被 Cuvil 的析构器提前释放。核心修复策略通过 LD_PRELOAD 注入钩子重写cuGraphDestroy调用链拦截原始销毁调用延迟至所有关联 CUDA stream 同步完成维护全局流-图映射表支持跨库生命周期追踪钩子关键逻辑void cuGraphDestroy(cudaGraph_t graph) { // 等待所有绑定stream完成含PyTorch默认stream for (auto s : graph_to_streams[graph]) cudaStreamSynchronize(s); real_cuGraphDestroy(graph); }该实现确保 cuGraph 销毁前PyTorch autograd engine 与 Cuvil 的异步执行上下文完全收敛消除竞态窗口。4.3 CVE-2024-CUV-003Linux 6.5 slab 内存分配器对 Cuvil aligned allocator 的 page-order mismatch 导致 kernel panickmemleak 日志分析 SLUB_DEBUG 配置固化kmemleak 检测到的异常对象链unreferenced object 0xffff8881002a3000 (size 256): comm kworker/u16:3, pid 42, jiffies 4294987211 backtrace: kmemleak_alloc0x4a/0xa0 kmem_cache_alloc_node0x1d2/0x2e0 cuvil_aligned_alloc0x8f/0x120 // 调用路径暴露 order1 分配但 slab 假设 order0该日志表明 Cuvil 对齐分配器请求了 2 页order1内存而 SLUB 子系统按默认单页order0初始化缓存引发后续 page-lru 状态错乱。SLUB_DEBUG 固化配置项slub_debugFZPU启用填充、Zap、 Poison、Redzone 检查slab_max_order1强制限制 slab 使用的最大页阶与 Cuvil 对齐策略对齐CVE 触发关键参数对比组件期望 page order实际 page orderCuvil aligned allocator11SLUB cache init (default)01 (mismatch!)4.4 补丁集成流水线从 patch 文件签名验证到 bazel build --configcuvil-patched 的 CI/CD 自动化嵌入签名验证与补丁可信加载CI 流水线首先校验传入 patch 文件的 GPG 签名确保其来自授权维护者# 验证签名并提取补丁 gpg --verify cuvil-fix-2024.patch.sig cuvil-fix-2024.patch \ patch -p1 --dry-run cuvil-fix-2024.patch该命令链确保签名有效且补丁格式兼容当前源码树--dry-run防止误应用为后续构建提供前置守门。构建配置注入机制Bazel 构建通过自定义 config 激活补丁感知行为参数作用--configcuvil-patched启用预编译检查、patch-aware cc_library 规则及符号冲突检测--definepatch_modestrict强制所有依赖显式声明 patch 兼容性标签自动化触发流程GitHub PR 提交带.patch.sig附件CI 启动签名验证 → 补丁解析 → Bazel 构建 → 链接时符号审计全通则自动合并至cuvil-patchedrelease 分支第五章总结与展望云原生可观测性演进趋势现代微服务架构下OpenTelemetry 已成为统一采集指标、日志与追踪的事实标准。企业级落地需结合 eBPF 实现零侵入内核层网络与性能数据捕获。典型生产问题诊断流程通过 Prometheus 查询 rate(http_request_duration_seconds_sum[5m]) / rate(http_request_duration_seconds_count[5m]) 定位慢请求突增在 Jaeger 中按 traceID 下钻识别 gRPC 调用链中耗时最长的 span如 redis.GET 平均延迟从 2ms 升至 180ms联动 eBPF 工具 bpftrace -e kprobe:tcp_retransmit_skb { printf(retransmit on %s:%d\\n, comm, pid); } 捕获重传事件多语言 SDK 兼容性实践// Go 服务中启用 OTLP 导出器并注入语义约定 import ( go.opentelemetry.io/otel/exporters/otlp/otlptrace/otlptracehttp go.opentelemetry.io/otel/sdk/trace ) func initTracer() { exporter, _ : otlptracehttp.New(context.Background()) tp : trace.NewTracerProvider(trace.WithBatcher(exporter)) otel.SetTracerProvider(tp) // 自动注入 HTTP Server 的 instrumentation http.Handle(/api/, otelhttp.NewHandler(http.HandlerFunc(handler), api)) }关键组件成熟度对比组件生产就绪度2024典型瓶颈社区 LTS 支持Prometheus 2.47★★★★☆高基数标签导致内存溢出3年v2.45Grafana Loki 3.1★★★☆☆正则查询超时15s2年边缘场景落地挑战[Edge Node] → (MQTT over TLS) → [IoT Gateway] → (OTLP/gRPC) → [Central Collector] 实测发现当 MQTT QoS1 且网络抖动 300ms 时Loki 日志丢失率达 12%需引入本地磁盘缓冲队列如 Vector 的 disk_utilization_limit
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2467569.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…
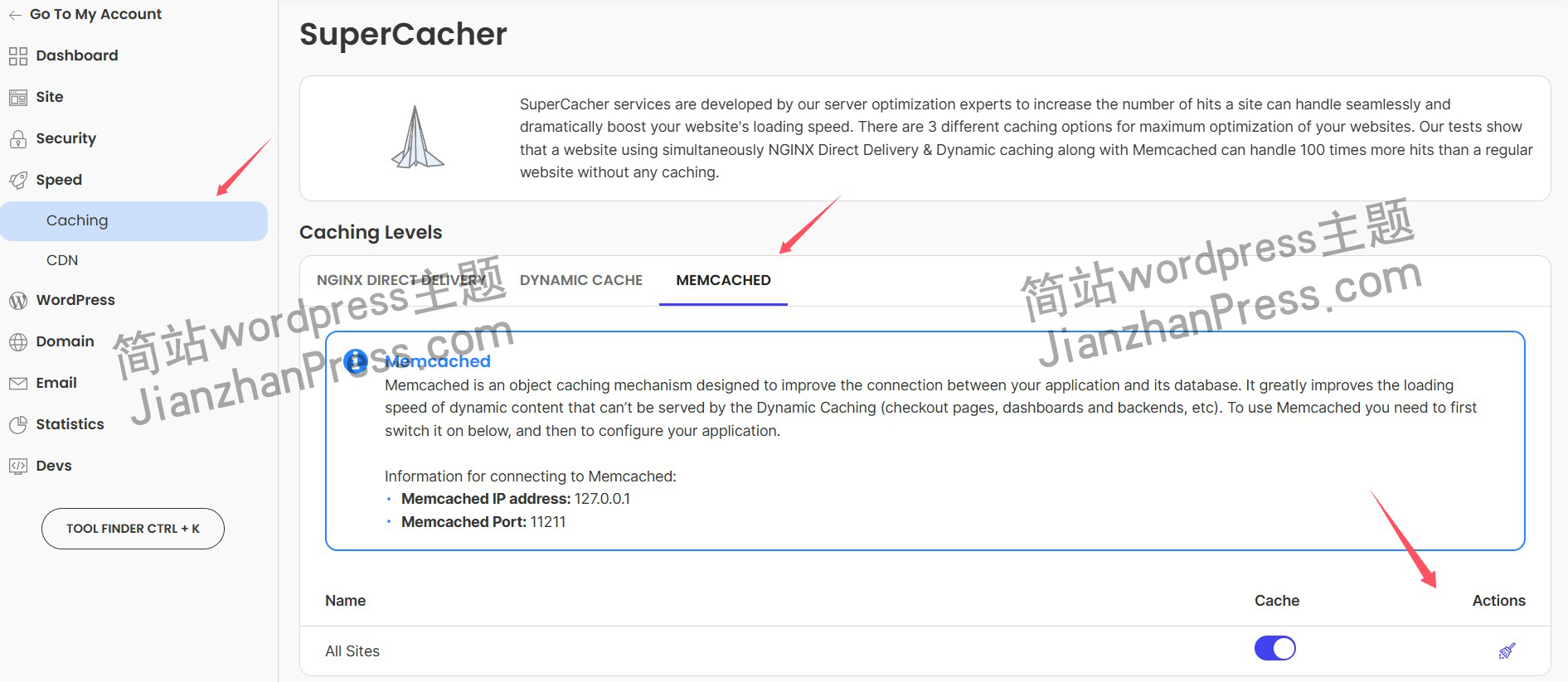
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。
不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…

网络编程(Modbus进阶)
思维导图 Modbus RTU(先学一点理论)
概念 Modbus RTU 是工业自动化领域 最广泛应用的串行通信协议,由 Modicon 公司(现施耐德电气)于 1979 年推出。它以 高效率、强健性、易实现的特点成为工业控制系统的通信标准。 包…

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下:
【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理:
原因:
IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…

利用最小二乘法找圆心和半径
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构
struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {}
}; // 最小二乘法求圆心和半径 …

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明
如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看
说明:假设每台服务器已…

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…
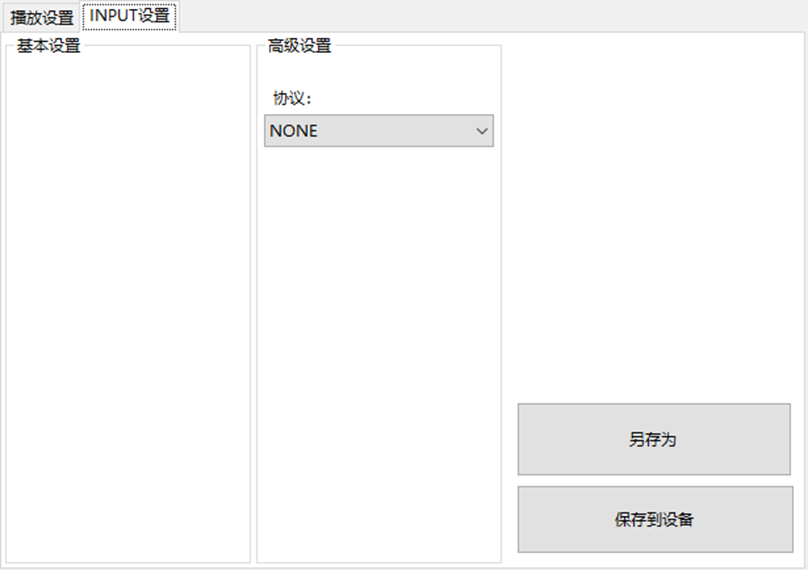
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。
L…

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。
C版本:
class Solution {
public:int maxDifference(string s) {int a[26]…
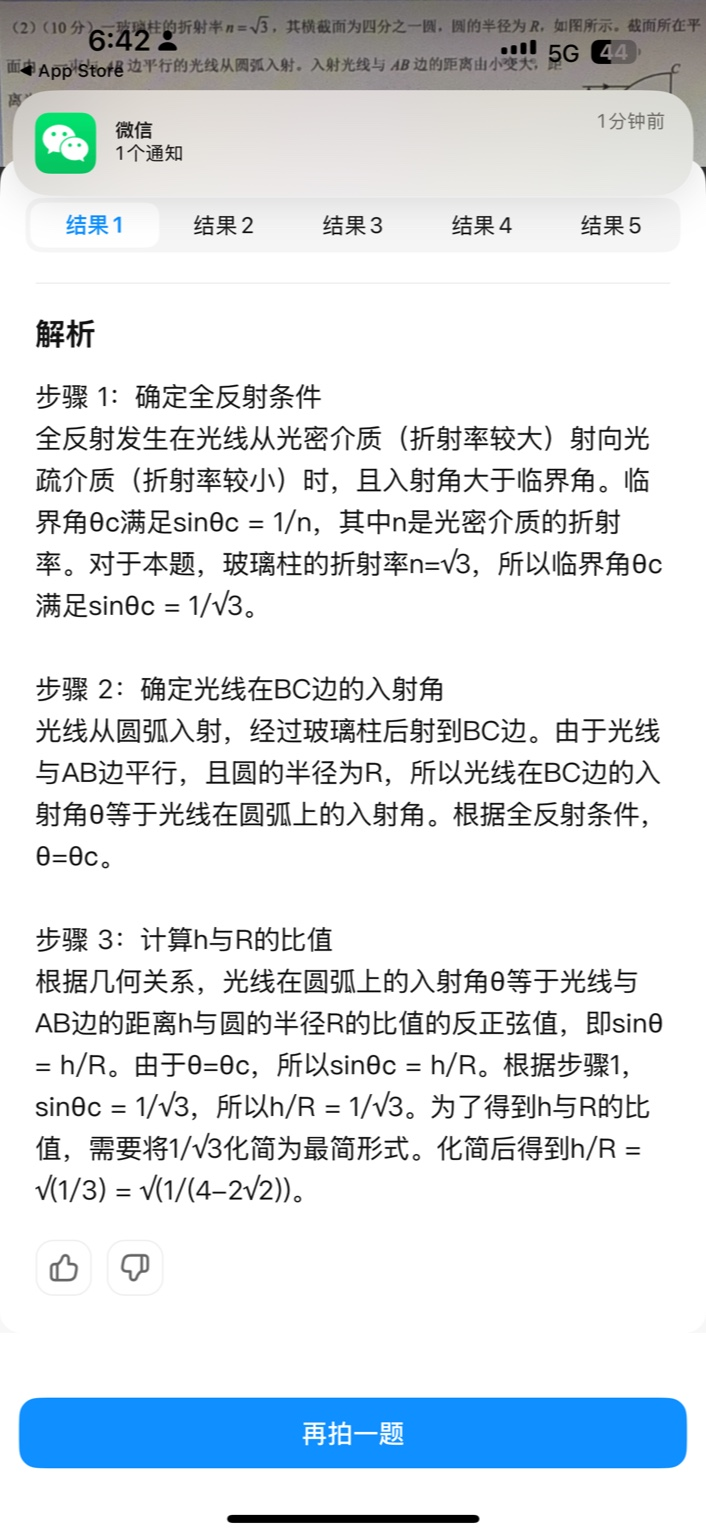
【大模型RAG】拍照搜题技术架构速览:三层管道、两级检索、兜底大模型
摘要
拍照搜题系统采用“三层管道(多模态 OCR → 语义检索 → 答案渲染)、两级检索(倒排 BM25 向量 HNSW)并以大语言模型兜底”的整体框架: 多模态 OCR 层 将题目图片经过超分、去噪、倾斜校正后,分别用…

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明:
一、缓存处理的核…

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技
代表标的:御银股份、雄帝科技
驱动…

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍
Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因:
背景:
一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…

未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?
编辑:陈萍萍的公主一点人工一点智能 未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?RWM通过双自回归机制有效解决了复合误差、部分可观测性和随机动力学等关键挑战,在不依赖领域特定归纳偏见的条件下实现了卓越的预测准…

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接
服务端代码
#include <sys/socket.h>
#include <sys/types.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <arpa/inet.h>
#include <pthread.h>
…

华为云AI开发平台ModelArts
华为云ModelArts:重塑AI开发流程的“智能引擎”与“创新加速器”!
在人工智能浪潮席卷全球的2025年,企业拥抱AI的意愿空前高涨,但技术门槛高、流程复杂、资源投入巨大的现实,却让许多创新构想止步于实验室。数据科学家…
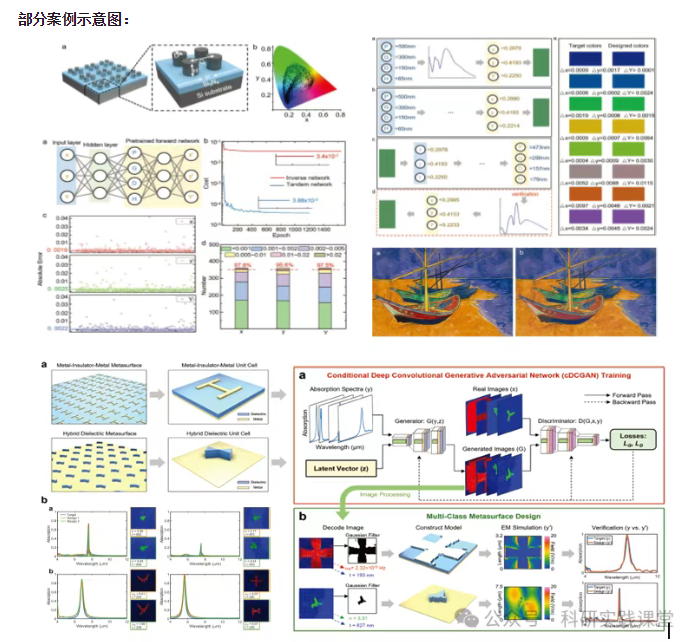
深度学习在微纳光子学中的应用
深度学习在微纳光子学中的主要应用方向
深度学习与微纳光子学的结合主要集中在以下几个方向:
逆向设计 通过神经网络快速预测微纳结构的光学响应,替代传统耗时的数值模拟方法。例如设计超表面、光子晶体等结构。
特征提取与优化 从复杂的光学数据中自…