Air780E模块GPS定位实战:从AT指令到地图显示的完整流程
news2026/3/25 2:15:33
Air780E模块GPS定位实战从AT指令到地图显示的完整流程在物联网和嵌入式开发领域精准定位功能已成为许多项目的核心需求。无论是资产追踪、车队管理还是户外探险设备GPS模块都扮演着关键角色。Air780E作为一款高性价比的通信模块集成了GPS功能为开发者提供了便捷的定位解决方案。本文将带你从零开始逐步实现从硬件连接到地图显示的完整流程避开那些新手常踩的坑。1. 硬件准备与环境搭建1.1 所需材料清单开始之前确保你已准备好以下硬件Air780E模块主控与GPS功能集成USB转TTL串口模块用于连接电脑调试天线GPS天线有源天线效果更佳杜邦线若干用于连接各组件电源5V/2A电源适配器模块峰值电流可达1.5A注意GPS天线应尽量放置在开阔区域金属外壳或建筑物遮挡会显著影响信号质量。1.2 硬件连接指南正确连接硬件是成功的第一步。参考以下接线方式Air780E引脚连接目标备注VCC5V电源红色线GND地线黑色线TXDRXD白/绿线RXDTXD白/绿线GPS_ANTGPS天线专用接口# 检查串口设备是否识别 ls /dev/ttyUSB* # Linux/Mac # 或查看设备管理器中的端口号 - Windows连接完成后给模块上电正常情况下会看到模块上的LED指示灯有规律地闪烁。2. AT指令基础与GPS功能启用2.1 串口工具配置推荐使用以下串口工具之一WindowsPutty、SecureCRT、MobaXtermMac/Linuxscreen、minicom、picocom关键配置参数波特率115200Air780E默认数据位8停止位1校验位无流控无# Python示例 - 简单的串口通信测试 import serial ser serial.Serial(/dev/ttyUSB0, 115200, timeout1) ser.write(bAT\r\n) # 注意添加回车换行 response ser.read(100) print(response.decode()) ser.close()2.2 核心GPS AT指令详解Air780E模块提供了一套完整的AT指令集来控制GPS功能。以下是关键指令及其作用基础查询与设置ATCGNSPWR?查询GPS电源状态ATCGNSPWR1开启GPS功能ATCGNSPWR0关闭GPS功能辅助定位设置ATCGNSAID31,1,1,1启用AGPS辅助定位ATCGNSCOLD冷启动GPSATCGNSHOT热启动GPS数据获取指令ATCGNSINF获取当前GNSS信息ATCGNSURC1启用自动位置上报ATCGNSURC0关闭自动位置上报提示首次定位可能需要2-10分钟冷启动后续热启动通常只需几秒。3. GPS数据解析与处理3.1 理解GNSS数据格式执行ATCGNSINF指令后模块会返回类似如下的数据CGNSINF: 1,1,20230815102305.000,22.572718,113.861326,15.500,0.0,0.0,1,,1.2,1.5,0.8,,6,8,,,35,各字段含义如下表所示序号字段示例含义单位11GNSS运行状态1:定位中21定位状态1:有效定位320230815102305.000UTC日期时间yyyyMMddHHmmss.sss422.572718纬度度5113.861326经度度615.500海拔高度米70.0地面速度公里/小时80.0航向度91定位模式1:单点定位3.2 数据解析实战以下是Python实现的简单解析代码def parse_gns_inf(data): 解析ATCGNSINF返回的数据 if not data.startswith(CGNSINF:): return None parts data.split(:)[1].strip().split(,) return { status: int(parts[0]), fix_status: int(parts[1]), utc_time: parts[2], latitude: float(parts[3]), longitude: float(parts[4]), altitude: float(parts[5]), speed: float(parts[6]), course: float(parts[7]), fix_mode: int(parts[8]), hdop: float(parts[10]) if parts[10] else None, pdop: float(parts[11]) if parts[11] else None, vdop: float(parts[12]) if parts[12] else None, satellites: int(parts[14]) if parts[14] else None } # 示例用法 sample_data CGNSINF: 1,1,20230815102305.000,22.572718,113.861326,15.500,0.0,0.0,1,,1.2,1.5,0.8,,6,8,,,35, parsed parse_gns_inf(sample_data) print(parsed)4. 地图集成与位置可视化4.1 坐标系转换基础GPS模块返回的坐标通常是WGS84坐标系而不同地图平台可能使用不同的坐标系百度地图BD09坐标系高德地图/Google地图GCJ02坐标系OpenStreetMapWGS84坐标系以下是Python实现的坐标转换示例import math def wgs84_to_gcj02(lon, lat): WGS84转GCJ02(火星坐标系) a 6378245.0 # 长半轴 ee 0.00669342162296594323 # 扁率 def transform_lon(x, y): ret 300.0 x 2.0 * y 0.1 * x * x 0.1 * x * y 0.1 * math.sqrt(abs(x)) ret (20.0 * math.sin(6.0 * x * math.pi) 20.0 * math.sin(2.0 * x * math.pi)) * 2.0 / 3.0 ret (20.0 * math.sin(x * math.pi) 40.0 * math.sin(x / 3.0 * math.pi)) * 2.0 / 3.0 ret (150.0 * math.sin(x / 12.0 * math.pi) 300.0 * math.sin(x / 30.0 * math.pi)) * 2.0 / 3.0 return ret def transform_lat(x, y): ret -100.0 2.0 * x 3.0 * y 0.2 * y * y 0.1 * x * y 0.2 * math.sqrt(abs(x)) ret (20.0 * math.sin(6.0 * x * math.pi) 20.0 * math.sin(2.0 * x * math.pi)) * 2.0 / 3.0 ret (20.0 * math.sin(y * math.pi) 40.0 * math.sin(y / 3.0 * math.pi)) * 2.0 / 3.0 ret (160.0 * math.sin(y / 12.0 * math.pi) 320 * math.sin(y * math.pi / 30.0)) * 2.0 / 3.0 return ret dlat transform_lat(lon - 105.0, lat - 35.0) dlon transform_lon(lon - 105.0, lat - 35.0) radlat lat / 180.0 * math.pi magic math.sin(radlat) magic 1 - ee * magic * magic sqrtmagic math.sqrt(magic) dlat (dlat * 180.0) / ((a * (1 - ee)) / (magic * sqrtmagic) * math.pi) dlon (dlon * 180.0) / (a / sqrtmagic * math.cos(radlat) * math.pi) mglat lat dlat mglon lon dlon return [mglon, mglat]4.2 地图API集成示例以百度地图JavaScript API为例展示如何在地图上标记位置!DOCTYPE html html head meta charsetutf-8 titleAir780E GPS位置展示/title script typetext/javascript srchttps://api.map.baidu.com/api?v3.0ak您的AK/script style #map-container { width: 100%; height: 500px; } /style /head body div idmap-container/div script // 初始化地图 var map new BMap.Map(map-container); // 设置中心点和缩放级别 map.centerAndZoom(new BMap.Point(113.861326, 22.572718), 15); // 添加控件 map.addControl(new BMap.NavigationControl()); map.addControl(new BMap.ScaleControl()); // 创建标记点 var marker new BMap.Marker(new BMap.Point(113.861326, 22.572718)); map.addOverlay(marker); // 添加信息窗口 var infoWindow new BMap.InfoWindow(Air780E定位位置); marker.addEventListener(click, function(){ this.openInfoWindow(infoWindow); }); /script /body /html5. 实战优化与性能提升5.1 定位精度优化策略提高GPS定位精度可以从以下几个方面入手天线选择与放置使用有源GPS天线带LNA放大器天线应远离金属物体和电磁干扰源尽量保持天线朝向天空软件优化启用AGPS辅助定位ATCGNSAID31,1,1,1适当延长定位时间冷启动建议3-5分钟定期清除旧的星历数据ATCGNSCOLD数据滤波算法实现移动平均滤波应用卡尔曼滤波算法设置合理的置信区间阈值# 简单的移动平均滤波实现 class MovingAverageFilter: def __init__(self, window_size5): self.window_size window_size self.values [] def filter(self, new_value): self.values.append(new_value) if len(self.values) self.window_size: self.values.pop(0) return sum(self.values) / len(self.values) # 使用示例 lat_filter MovingAverageFilter() lon_filter MovingAverageFilter() while True: data get_gps_data() # 获取原始GPS数据 filtered_lat lat_filter.filter(data[latitude]) filtered_lon lon_filter.filter(data[longitude]) print(f原始坐标: {data[latitude]}, {data[longitude]}) print(f滤波后坐标: {filtered_lat}, {filtered_lon})5.2 低功耗设计技巧对于电池供电的物联网设备GPS功耗是需要重点考虑的因素间歇工作模式根据应用需求设置定位间隔动态精度调整静止时可降低定位频率睡眠模式管理使用ATCGNSPWR0关闭GPS模块数据缓存机制本地存储位置记录批量上传# 示例每小时定位一次的脚本逻辑 while true; do # 开启GPS echo -e ATCGNSPWR1\r\n /dev/ttyUSB0 sleep 30 # 等待定位 # 获取位置 echo -e ATCGNSINF\r\n /dev/ttyUSB0 sleep 1 # 读取并处理位置数据... # 关闭GPS以省电 echo -e ATCGNSPWR0\r\n /dev/ttyUSB0 sleep 3540 # 等待下一小时 done在实际项目中我发现GPS模块的初始化时间对用户体验影响很大。通过预加载星历数据和合理设置辅助定位参数可以将首次定位时间从几分钟缩短到几十秒。特别是在城市峡谷环境中这种优化效果更为明显。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2440506.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…
wordpress后台更新后 前端没变化的解决方法
使用siteground主机的wordpress网站,会出现更新了网站内容和修改了php模板文件、js文件、css文件、图片文件后,网站没有变化的情况。
不熟悉siteground主机的新手,遇到这个问题,就很抓狂,明明是哪都没操作错误&#x…

网络编程(Modbus进阶)
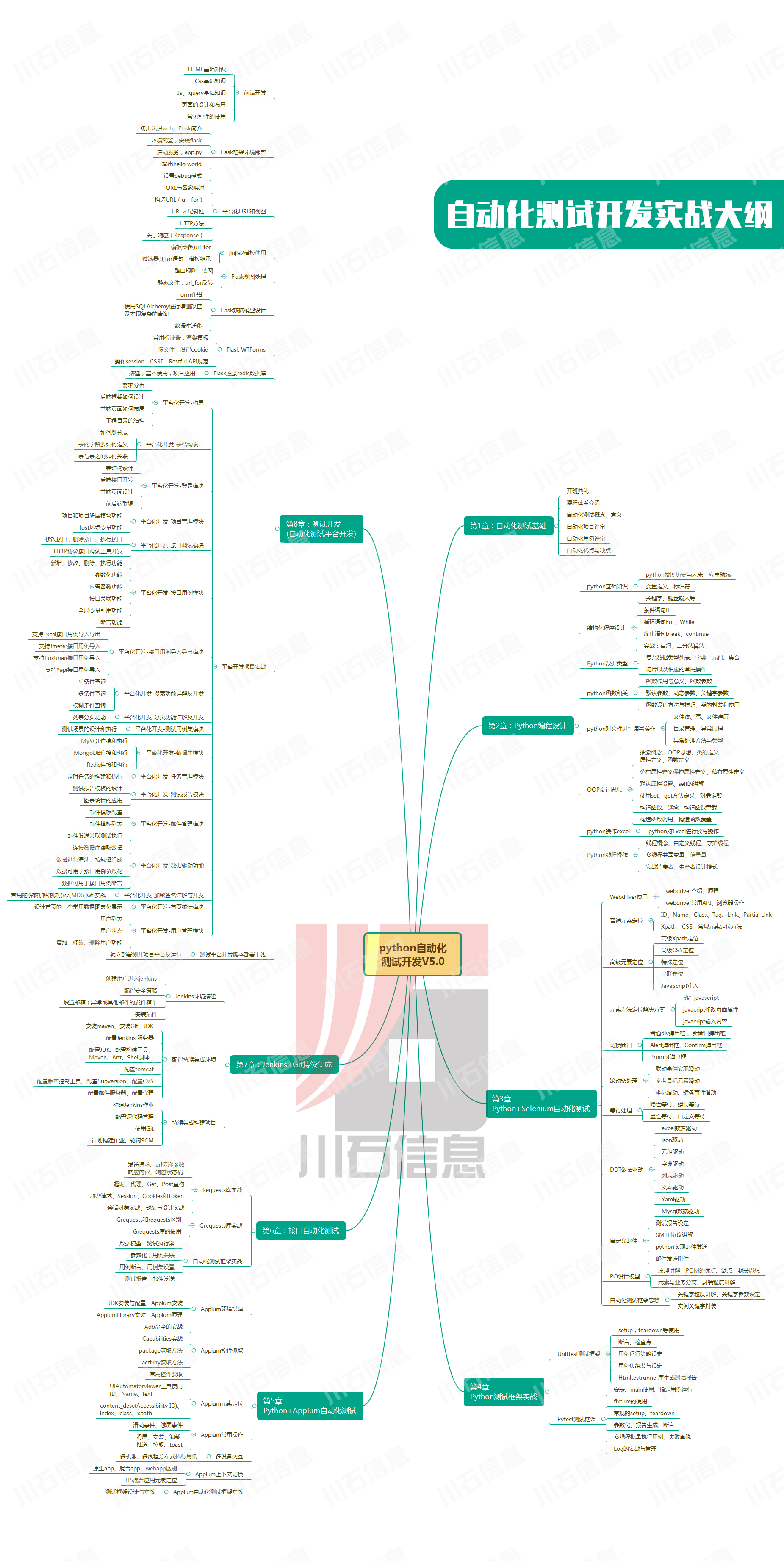
思维导图 Modbus RTU(先学一点理论)
概念 Modbus RTU 是工业自动化领域 最广泛应用的串行通信协议,由 Modicon 公司(现施耐德电气)于 1979 年推出。它以 高效率、强健性、易实现的特点成为工业控制系统的通信标准。 包…

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下:
【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理:
原因:
IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…

利用最小二乘法找圆心和半径
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构
struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {}
}; // 最小二乘法求圆心和半径 …

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明
如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看
说明:假设每台服务器已…

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。
L…

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。
C版本:
class Solution {
public:int maxDifference(string s) {int a[26]…
【大模型RAG】拍照搜题技术架构速览:三层管道、两级检索、兜底大模型
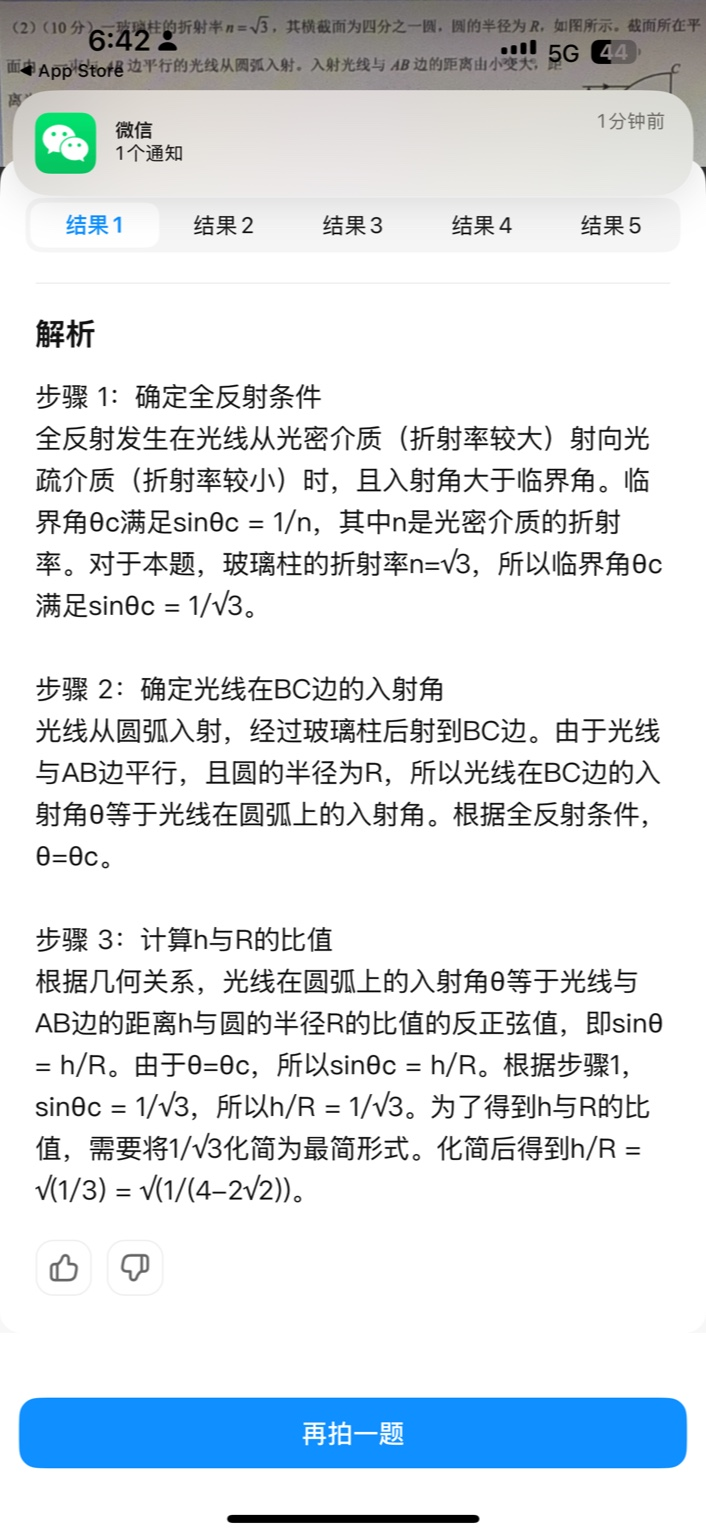
摘要
拍照搜题系统采用“三层管道(多模态 OCR → 语义检索 → 答案渲染)、两级检索(倒排 BM25 向量 HNSW)并以大语言模型兜底”的整体框架: 多模态 OCR 层 将题目图片经过超分、去噪、倾斜校正后,分别用…

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明:
一、缓存处理的核…

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技
代表标的:御银股份、雄帝科技
驱动…

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍
Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因:
背景:
一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…

未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?
编辑:陈萍萍的公主一点人工一点智能 未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?RWM通过双自回归机制有效解决了复合误差、部分可观测性和随机动力学等关键挑战,在不依赖领域特定归纳偏见的条件下实现了卓越的预测准…

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接
服务端代码
#include <sys/socket.h>
#include <sys/types.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <arpa/inet.h>
#include <pthread.h>
…

华为云AI开发平台ModelArts
华为云ModelArts:重塑AI开发流程的“智能引擎”与“创新加速器”!
在人工智能浪潮席卷全球的2025年,企业拥抱AI的意愿空前高涨,但技术门槛高、流程复杂、资源投入巨大的现实,却让许多创新构想止步于实验室。数据科学家…
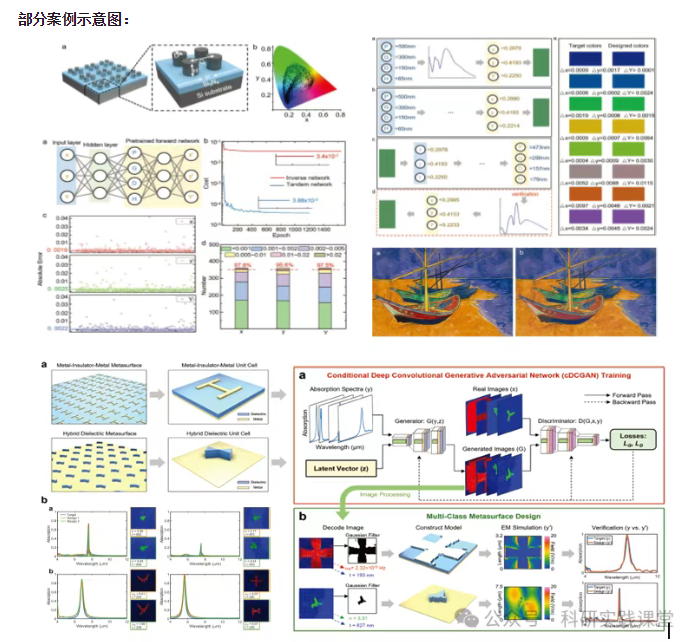
深度学习在微纳光子学中的应用
深度学习在微纳光子学中的主要应用方向
深度学习与微纳光子学的结合主要集中在以下几个方向:
逆向设计 通过神经网络快速预测微纳结构的光学响应,替代传统耗时的数值模拟方法。例如设计超表面、光子晶体等结构。
特征提取与优化 从复杂的光学数据中自…