目录
- 相关地震知识补充
- 地震数据的认识
- 地震几何属性
- 相干体算法
- 定义
- 基本原理
- 第一代相干体技术:基于互相关的相干体技术(Correlation)
- 第二代相干体技术:基于相似的相干体技术(Semblance)
- 基于多道相似的相干体技术
- 基于曼哈顿(Manhattan)距离的波形相似性算法
- 基于复地震道的相干体技术
- 参考
相关地震知识补充
地震数据的认识
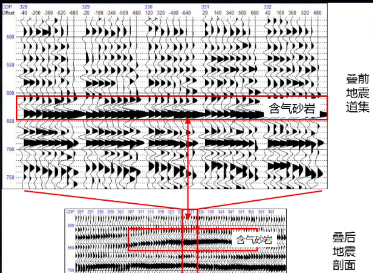
叠前数据和叠后数据的理解:
叠前和叠后是针对地震资料处理中的偏移来说的,由于地下介质不是水平的,导致反射波的同相轴发生偏移,从而不能正确反映地下介质的真实状况,因此需要对地震资料进行偏移处理。偏移的方式有两种:叠加之前偏移和叠加之后偏移,前者叫叠前,后者成为叠后。
各自的特点:
- 叠前数据:
- 信息完整性:保留原始地震波的全部动力学特征,包括振幅、频率、相位等,对岩性变化和流体识别敏感;
- 信噪比低,随机干扰强;
- 数据量庞大,存储与计算成本高;
- 适用于复杂构造和高精度岩性分析;
- 叠后数据:
- 通过共中心点(CMP)叠加压制随机噪声,显著提高信噪比,但损失了部分振幅与相位细节;
- 数据量大幅压缩,处理效率高;
- 主要用于构造解释,适用于速度横向变化平缓区域。
地震几何属性
地震几何属性是从地震数据中提取的、描述地下地质体空间形态和结构特征的参数集合(如反射界面的曲率、倾角、连续性等),主要用于刻画地层界面、断层、裂缝系统等构造的几何形态变化。
- 区别于动力学属性(振幅、频率等),几何属性聚焦于构造形态而非岩性物性。
分类
| 类别 | 属性 | 功能描述 |
|---|---|---|
| 连续性属性 | 相干体(Coherence) | 量化相邻道相似性,识别断层、裂缝带等不连续区域 |
| 曲率属性 | 最大正曲率、最大负曲率 | 刻画地层弯曲程度(如背斜、向斜),预测裂缝发育区 |
| 梯度属性 | 倾角(Dip)、方位角(Azimuth) | 描述地层界面空间产状,恢复古构造格局 |
| 边缘检测属性 | 断棱(Edge) | 强化断层边界,辅助断裂系统精细解释 |
相干体算法
定义
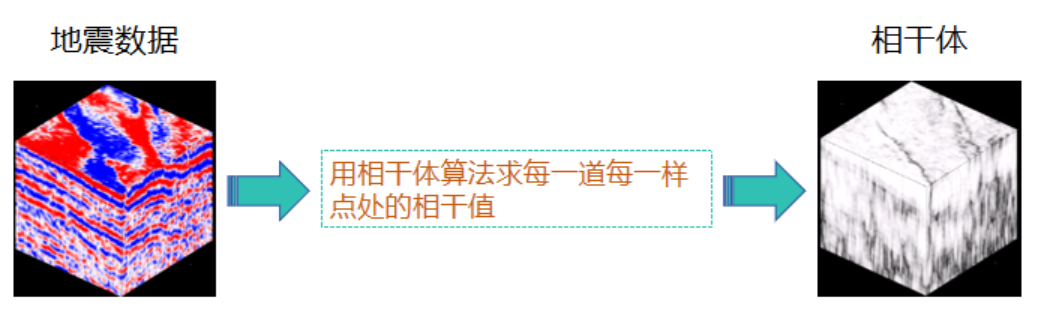
相干体是指由三维地震数据体经过相干处理而得到的一个新的数据体,其基本原理是在三维数据体中,求每一道每一样点处小时窗内分析点所在道与相邻道波形的相似性,形成一个表征相干性的三维数据体,即计算时窗内的数据相干性,把这一结果赋予时窗中心样点。——Amoco公司
相干体技术是利用地震信号相干值的变化来描述地层、岩性等的横向非均匀性,进而研究断层、微断裂的空间分布,地质构造异常及岩性的整体空间展布特征。
基本原理
物理基础:地震波传播时的相干性原理——当地层连续时,相邻接收点记录波形相位一致;地层破碎时,则波场散射,相位失配。
相似性度量:计算相邻地震道波形的互相关系数或方差,量化地震信号的横向连续性:
- 高相干值(接近1):反射界面连续,地质均匀;
- 低相干值(接近0):表示存在断层、裂缝或岩性突变等不连续区域;
分割线中内容是在百度过程中,结合图像相关写出的推导,用来辅助理解吧
归一化互相干(NCC)
在了解归一化互相干系数之前,我们先回顾一下相关系数的计算:
r
(
X
,
Y
)
=
C
o
v
(
X
,
Y
)
V
a
r
(
X
)
V
a
r
(
Y
)
C
o
v
(
X
,
Y
)
=
E
[
(
X
−
E
(
X
)
)
(
Y
−
E
(
Y
)
)
]
V
a
r
(
X
)
=
E
[
(
X
−
E
(
X
)
)
2
]
\begin{equation}\begin{aligned} r(X,Y) &= \frac{Cov(X,Y)}{\sqrt{Var(X)Var(Y)}}\\ Cov(X,Y) &= E[(X-E(X))(Y-E(Y))]\\ Var(X) &= E[(X-E(X))^2]\\ \end{aligned}\end{equation}
r(X,Y)Cov(X,Y)Var(X)=Var(X)Var(Y)Cov(X,Y)=E[(X−E(X))(Y−E(Y))]=E[(X−E(X))2]
其中,
C
o
v
(
X
,
Y
)
Cov(X,Y)
Cov(X,Y)表示向量
X
X
X与
Y
Y
Y的协方差,
V
a
r
(
X
)
Var(X)
Var(X)和
V
a
r
(
Y
)
Var(Y)
Var(Y)分别表示
X
X
X与
Y
Y
Y的方差。
归一化互相关(Normalized Cross-Correlation, NCC)是一种用于衡量两个信号相似度的算法,其核心是通过消除幅度影响提升匹配鲁棒性。
窗口定义:以目标点为中心,选取
K
×
K
K\times K
K×K道(如3×3或5×5)的局部窗口),同时设置时间窗口大小为
k
k
k。
波形相似性计算:对窗口内每一对相邻地震道,逐时间样点计算归一化互相关系数:
ρ
x
y
=
∑
i
=
t
t
+
k
(
x
i
−
μ
x
)
⋅
(
y
i
−
μ
y
)
∑
i
=
t
t
+
k
(
x
i
−
μ
x
)
2
⋅
∑
i
=
t
t
+
k
(
y
i
−
μ
y
)
2
\rho_{xy} = \frac{\sum\limits_{i = t}^{t+k}(x_i - \mu_x) \cdot (y_i - \mu_y)}{\sqrt{\sum\limits_{i = t}^{t+k}(x_i - \mu_x)^2} \cdot \sqrt{\sum\limits_{i = t}^{t+k} (y_i - \mu_y)^2}}
ρxy=i=t∑t+k(xi−μx)2⋅i=t∑t+k(yi−μy)2i=t∑t+k(xi−μx)⋅(yi−μy)
其中:
- x i , y i x_i, y_i xi,yi:窗口内第 i i i个采样点值(在地震资料处理,可理解位两道时间序列);
- μ x , μ y \mu_x, \mu_y μx,μy:窗口内 x , y x, y x,y的均值;
输出:将窗口内所有相邻道对的平均 ρ \rho ρ值赋给目标点,生成相干属性体(值域为[0,1],低值指示裂缝)
第一代相干体技术:基于互相关的相干体技术(Correlation)
相关性算法是根据随机过程的互相关分析,计算相邻地震道的互相关函数来反映相同轴的不连续性。
地震道的空间组合模式如下:
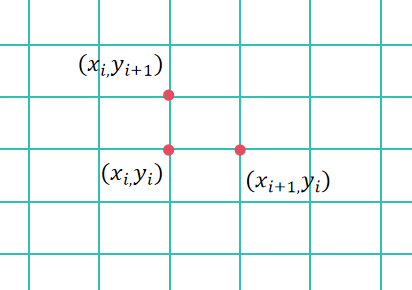
在纵测线方向
t
t
t时刻计算归一化互相关(时间窗口为
2
ω
2\omega
2ω):
C
12
(
t
,
p
,
x
i
,
y
i
)
=
∑
τ
=
−
ω
+
ω
u
(
t
−
τ
,
x
i
,
y
i
)
u
(
t
−
τ
−
p
,
x
i
+
1
,
y
i
)
∑
τ
=
−
ω
+
ω
u
2
(
t
−
τ
,
x
i
,
y
i
)
u
2
(
t
−
τ
−
p
,
x
i
+
1
,
y
i
)
C_{12}(t,p,x_i,y_i) = \frac{\sum\limits_{\tau = - \omega}^{+\omega}u(t-\tau,x_i,y_i)u(t-\tau-p,x_{i+1},y_i)}{\sqrt{\sum\limits_{\tau = - \omega}^{+\omega}u^2(t-\tau,x_i,y_i)u^2(t-\tau-p,x_{i+1},y_i)}}
C12(t,p,xi,yi)=τ=−ω∑+ωu2(t−τ,xi,yi)u2(t−τ−p,xi+1,yi)τ=−ω∑+ωu(t−τ,xi,yi)u(t−τ−p,xi+1,yi)
在横测线方向
t
t
t时刻计算归一化互相关:
C
13
(
t
,
q
,
x
i
,
y
i
)
=
∑
τ
=
−
ω
+
ω
u
(
t
−
τ
,
x
i
,
y
i
)
u
(
t
−
τ
−
q
,
x
i
,
y
i
+
1
)
∑
τ
=
−
ω
+
ω
u
2
(
t
−
τ
,
x
i
,
y
i
)
u
2
(
t
−
τ
−
q
,
x
i
,
y
i
+
1
)
C_{13} (t,q,x_i,y_i)= \frac{\sum_{\tau = - \omega}^{+\omega}u(t-\tau,x_i,y_i)u(t-\tau-q,x_{i},y_{i+1})}{\sqrt{\sum_{\tau = - \omega}^{+\omega}u^2(t-\tau,x_i,y_i)u^2(t-\tau-q,x_i,y_{i+1})}}
C13(t,q,xi,yi)=∑τ=−ω+ωu2(t−τ,xi,yi)u2(t−τ−q,xi,yi+1)∑τ=−ω+ωu(t−τ,xi,yi)u(t−τ−q,xi,yi+1)
沿视倾角
(
p
,
q
)
(p,q)
(p,q)的相干值
C
1
C_1
C1为:
C
1
(
p
,
q
)
=
[
C
12
(
C
11
C
22
)
1
2
C
13
(
C
11
C
33
)
1
2
]
1
2
C_1(p,q) = [\frac{C_{12}}{(C_{11}C_{22})^{\frac{1}{2}}} \frac{C_{13}}{(C_{11}C_{33})^{\frac{1}{2}}}]^{\frac{1}{2}}
C1(p,q)=[(C11C22)21C12(C11C33)21C13]21
其中,
C
i
i
C_{ii}
Cii为第
i
i
i道的自相关量;
C
i
j
C_{ij}
Cij为第
i
i
i道和第
j
j
j道的互相关量。视倾角
(
p
,
q
)
(p,q)
(p,q)中
p
p
p和
q
q
q分别为
x
x
x方向和
y
y
y方向上的地震道之间的时移量。
特点:
- 第一代相干体技术只取了三道地震数据来计算,因此处理速度较快,但该方法的抗噪能力较差,计算的结果存在较多雪花状干扰,同时对于大倾角的裂缝及断层检测效果较差。
- 三点互相关算法假设地震道是零平均信号,当相关时窗长度超过地震子波长度时,这种假设才基本成立,即要求窗口大于地震反射的最长周期,但这样降低了计算得到的相干体数据的垂向分辨率。
第二代相干体技术:基于相似的相干体技术(Semblance)
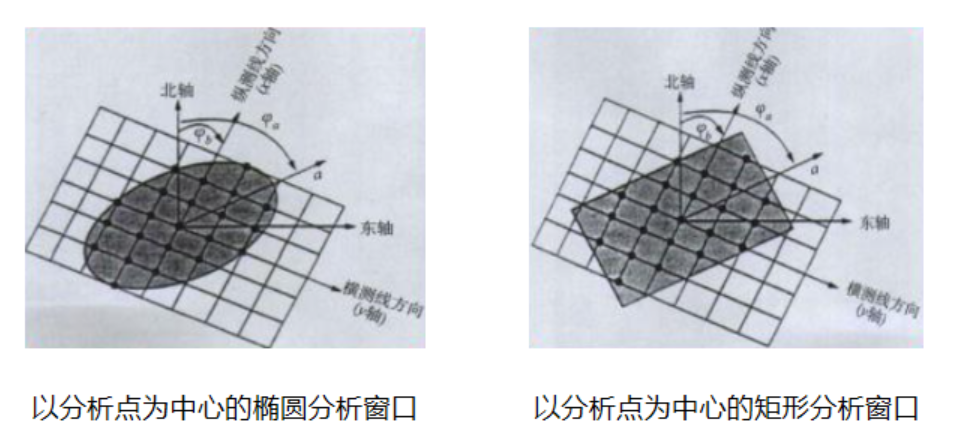
基于多道相似的相干体技术
定义一个以分析点为中心的包含
J
J
J道的椭圆或矩形分析时窗,则相干值
C
2
C_2
C2为分析时窗内平均道的能量与所有道的能量比,计算为:
C
2
(
t
,
p
,
q
)
=
∑
k
=
−
K
+
K
[
1
J
∑
j
=
1
J
u
j
(
t
+
k
Δ
t
−
p
x
j
−
p
y
j
)
]
2
∑
k
=
−
K
+
K
1
J
[
∑
j
=
1
J
u
j
(
t
+
k
Δ
t
−
p
x
j
−
p
y
j
)
]
2
C_2(t,p,q) = \frac{\sum\limits_{k = -K}^{+K}[\frac{1}{J}\sum\limits_{j=1}^{J}{u_j(t+k\Delta t - px_j-py_j)}]^2}{\sum\limits_{k = -K}^{+K}\frac{1}{J}[\sum\limits_{j=1}^{J}{u_j(t+k\Delta t - px_j-py_j)}]^2}
C2(t,p,q)=k=−K∑+KJ1[j=1∑Juj(t+kΔt−pxj−pyj)]2k=−K∑+K[J1j=1∑Juj(t+kΔt−pxj−pyj)]2
上式中,下标
j
j
j表示落在分析时窗内的第
j
j
j道;
x
j
x_j
xj和
y
j
y_j
yj表示第
j
j
j道与分析时窗内中心点
t
t
t在
x
x
x和
y
y
y方向的举例;
p
p
p和
q
q
q分别表示分析时窗内中心点,所在局部反射界面
x
x
x和
y
y
y方向的视倾角。
特点:
- 可以对任意多道地震数据计算相干性,能够较精准地计算有噪声数据的相干性、倾角和方位角;
- 用一个适当大小的分析窗口,能较好地解决提高分辨率和提高信噪比之间的矛盾;
- 因此,基于多道相似的相干体技术具有较好的适用性和分辨女,而且具有相当快的计算速度。
基于曼哈顿(Manhattan)距离的波形相似性算法
对于地震数据体中的相干计算道,设
G
G
G为中心道,
H
H
H为相邻道,定义归一化的曼哈顿距离计算公式为
M
d
=
∑
k
=
N
−
n
/
2
k
=
N
+
n
/
2
∣
G
k
−
H
k
+
d
∣
∑
k
=
N
−
n
/
2
k
=
N
+
n
/
2
(
∣
G
k
∣
+
∣
H
k
+
d
∣
)
M_d = \frac{\sum\limits_{k=N-n/2}^{k=N+n/2}|G_k - H_{k+d}|}{\sum\limits_{k=N-n/2}^{k=N+n/2}(|G_k| + |H_{k+d}|)}
Md=k=N−n/2∑k=N+n/2(∣Gk∣+∣Hk+d∣)k=N−n/2∑k=N+n/2∣Gk−Hk+d∣
上式中,
M
d
M_d
Md为归一化曼哈顿距离距离,
n
n
n为相关时窗长度(样点数),
d
d
d为地层倾斜时的时间延迟值,
N
N
N为中心道
G
G
G相关时窗的时间样点值。在始终当中心道
G
G
G与相邻道
H
H
H相同时,
M
d
M_d
Md等于零;当中心道
G
G
G与相邻道
H
H
H完全不想死即极性相反时,
M
d
M_d
Md等于1;其他情况下,
M
d
M_d
Md的值介于0到1之间。
特点:
- 基于归一化的曼哈顿距离的相干算法只涉及两个随机信号的加减运算,不涉及普通相干计算中的两个随机信号的乘积运算,因此具有较高的运算效率。
基于复地震道的相干体技术
如果在小的垂向时窗内应用于基于多道相抵的相干体算法,在计算零值附近同相轴的相干体时会造成一些假象,一旦地震信号的振幅低于背景噪音,相干算法将识别为地震数据不相干,将产生低相干的假象。应用复地震道技术可以解决这个问题,对应的相干体计算公式为:
C
H
(
t
,
p
,
q
)
=
∑
k
=
−
K
+
K
{
[
1
J
∑
j
=
1
J
u
j
(
t
+
k
Δ
t
−
p
x
j
−
q
y
j
)
]
2
+
∑
k
=
−
K
+
K
[
1
J
∑
j
=
1
J
u
j
H
(
t
+
k
Δ
t
−
p
x
j
−
q
y
j
)
]
2
}
∑
k
=
−
K
+
K
1
J
∑
j
=
1
J
{
[
u
j
(
t
+
k
Δ
t
−
p
x
j
−
q
y
j
)
]
2
+
[
u
j
H
(
t
+
k
Δ
t
−
p
x
j
−
q
y
j
)
]
2
}
C_H(t,p,q) = \frac{\sum\limits_{k=-K}^{+K}{\left \{\left[\frac{1}{J}\sum\limits_{j=1}^{J}u_j(t+k\Delta t -px_j -qy_j)\right]^2 +\sum\limits_{k=-K}^{+K}\left[\frac{1}{J}\sum\limits_{j=1}^{J}u_j^H(t+k\Delta t -px_j -qy_j)\right]^2\right \}}}{\sum\limits_{k=-K}^{+K}\frac{1}{J}\sum\limits_{j=1}^{J}\left \{\left[ u_j(t+k\Delta t -px_j -qy_j)\right]^2+\left[ u_j^H(t+k\Delta t -px_j -qy_j)\right]^2\right\}}
CH(t,p,q)=k=−K∑+KJ1j=1∑J{[uj(t+kΔt−pxj−qyj)]2+[ujH(t+kΔt−pxj−qyj)]2}k=−K∑+K⎩
⎨
⎧[J1j=1∑Juj(t+kΔt−pxj−qyj)]2+k=−K∑+K[J1j=1∑JujH(t+kΔt−pxj−qyj)]2⎭
⎬
⎫
上式中,上标
H
H
H表示地震数据的希尔伯特征变换或正交地震道。当地震道的数据为零时,其对应的正交地震道数据的量值最大;当正交地震道的数据为零时,其实际地震数据的量值最大,这样相干体的算法就比较稳定,保真性好。
先写道这儿,有好多相关术语,看得我云里雾里的,灰溜溜地补地震勘探基础去了
参考
地震相干体技术分析;
基于Windows的三维可视化地震资料解释系统_李更想;
基于地震相干体数据的裂缝及断层检测方法研究_廖龙;