【导读】
野生动物监测在理解和保护生态系统中发挥着至关重要的作用。然而,传统的野生动物观察方法往往耗时耗力、成本高昂且范围有限。无人机的出现为野生动物监测提供了有前景的替代方案,能够实现大范围覆盖并远程采集数据。尽管具备这些优势,但通过航拍图像有效检测和识别小型或伪装的野生动物物种(如鹿)仍面临挑战。本研究分析了人工智能技术在航拍图像中自动识别鹿的应用,从而解决野生动物保护中的关键难题。>>更多资讯可加入CV技术群获取了解哦~
在广袤的潘帕斯草原和巴拉那河三角洲,濒危鹿类正因栖息地破坏而日益稀少。传统的人工监测方式不仅耗时耗力,还难以覆盖复杂地形。阿根廷研究团队最新成果显示,通过高分辨率无人机航拍和YOLOv8深度学习算法,仅需3小时43分钟就能完成近4万张航拍图像的鹿群筛查,准确率高达95%。这项技术如何从实验室走向荒野?
论文标题:
Efficient Endangered Deer Species Monitoring with UAV Aerial Imagery and Deep Learning
论文链接:
https://arxiv.org/pdf/2506.00164
目录
一、摘要
二、研究方法
相关研究
数据采集
数据处理
千款模型+海量数据,开箱即用!
三、结果
检测评估
发现未标注的鹿
潘帕斯鹿的评估
无需代码,训练结果即时可见!
从实验到落地,全程高速零代码!
四、结论
一、摘要
本文探讨了利用无人机(UAV)和深度学习技术在自然栖息地中检测濒危鹿类物种的应用。由于传统识别流程需要经过专业培训的人工操作,这在资源和时间上都可能造成高昂成本,因此亟需更高效的解决方案。通过利用高分辨率航拍影像,应用先进计算机视觉技术实现鹿类自动识别。研究团队基于YOLO框架开发了定制算法,并利用无人机拍摄的图像数据集进行训练。研究结果表明,该算法能以高精度有效识别沼泽鹿,并初步验证了其在潘帕斯鹿识别中的应用潜力,尽管仍存在一定局限性。本研究不仅支持当前保护工作,还凸显了将人工智能与无人机技术整合以提升野生动物监测与管理实践的潜力。
二、研究方法
采用了一种结构化的方法,涵盖数据的采集与处理,以及先进深度学习技术在野生动物检测中的应用。
-
相关研究
由于多种因素,如标志性物种的非法猎杀增加以及自然环境的改变,越来越多的物种面临灭绝威胁。栖息地快速丧失和环境退化加剧了这一局面,因此对野生动物进行定期监测至关重要,以理解那些变化速度超过野生动物群落正常变迁的进程。为简化观测任务并降低成本,无人机(UAV)已被用于此类任务多年。
无人机在野生动物观测中的应用已超过十年。本研究采用YOLOv8模型对无人机获取的图像中的沼泽鹿进行检测。该方法专门针对沼泽鹿的检测,但所用数据集还包含牛、水豚和鸟类等其他动物的图像,这表明该模型在检测过程中能够处理多样化的野生动物。这一方法代表了基于无人机野生动物监测领域的重大进展,通过将深度学习技术与实际应用相结合,提升了保护工作成效。
-
数据采集
使用某些工具进行野生动物自动检测的关键在于拥有足够丰富的数据库来训练算法。本研究中,Pantano 项目框架内获取的信息可供使用。
此外,还在PNCDT进行了调查,并从不同车辆获取了鹿的航拍图像。尽管该数据库的规模不如Pantano项目,但它对于验证在特定栖息地针对某一鹿科物种训练的网络如何将学习成果推广到具有不同特征和栖息地的另一物种具有实用价值。
-
使用的车辆和摄像头:
Pantano项目:为收集用于创建Pantano项目数据库的数据,使用了配备高分辨率2000万像素摄像头(84°视场角、8.8/24毫米镜头、1米距离下自动对焦范围为f/2.8至f/11)的Phantom 4 Pro四旋翼无人机,该摄像头安装于三轴稳定器上。该无人机可自动执行飞行任务,通过DJI专有软件加载飞行路线,起飞后从起飞点沿预设路线飞行,地面操作员远程监控。
在本研究中,热成像摄像头获取的信息未用于网络训练,因为目前缺乏足够的鹿类热成像数据。然而,计划开展更多飞行任务以覆盖更广区域并获取更多鹿类热成像数据,因现有结果显示出良好前景。
如图1和图2所示,展示了在PNCDT的一次飞行中,六旋翼无人机摄像头在可见光谱和热成像光谱下拍摄的图像对比。在图1中,即使放大图像(该图像来自1080p视频的帧),也几乎无法检测到鹿。相比之下,如图2所示,同一场景通过热成像视频捕捉时,两只鹿的轮廓清晰可见。
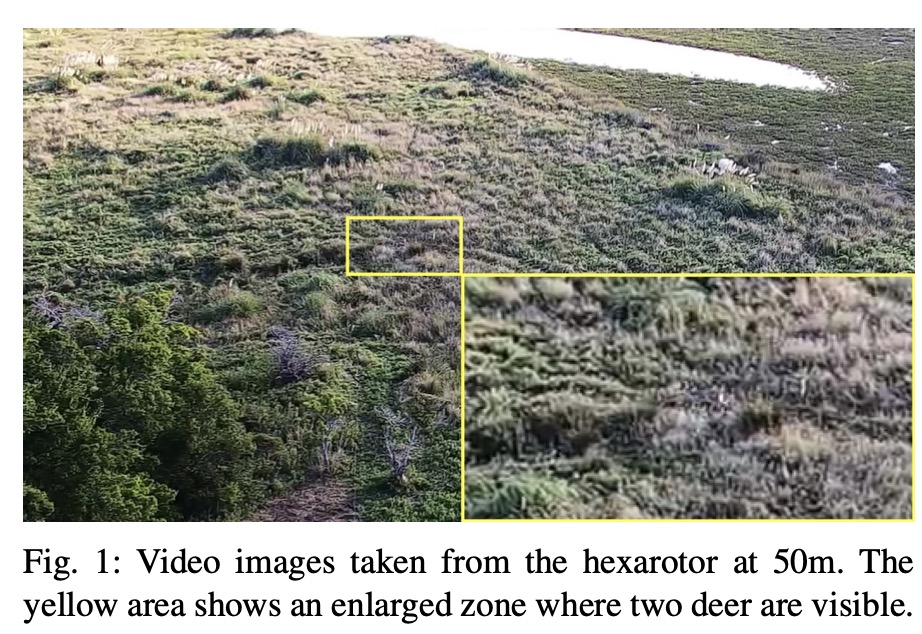
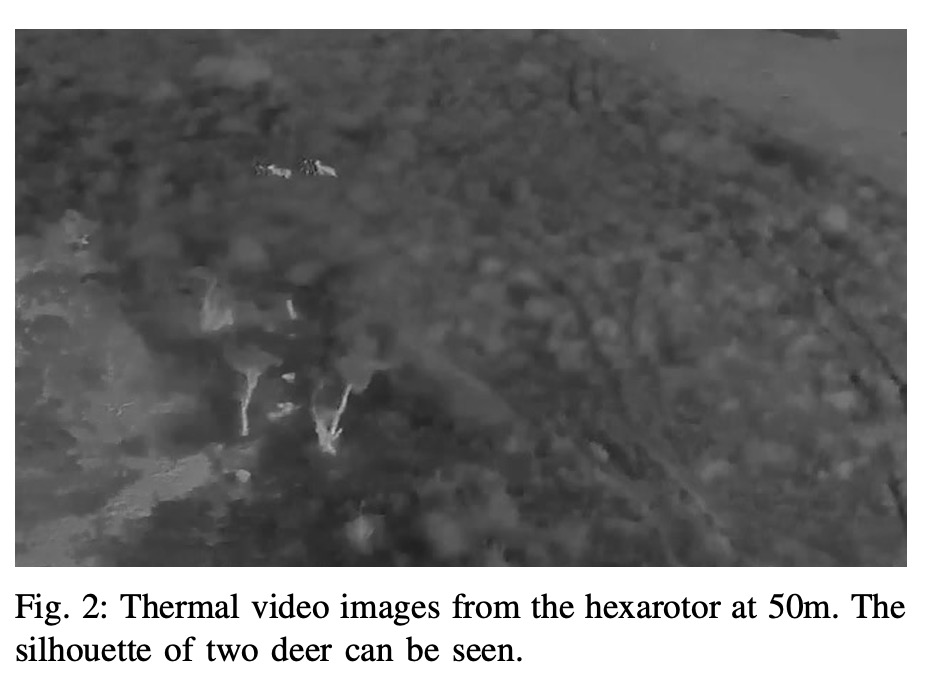
在RGB视频中,由于鹿的运动,可以检测到它们,但分析单帧时则无法检测到。在某些情况下,动态信息可用于检测动物,但理想情况下,鹿不应因无人机存在而受到惊扰,因此大多数视频两辆无人机的自动驾驶仪均为Pixhawk v2.4.8,每辆无人机均配置了PX4固件。使用QGroundControl软件对无人机进行配置并编程任务。
-
航线:
Pantano项目:2019年5月16日至17日,开展了一项初步探索性研究,期间执行了六次飞行计划(总飞行距离为19.5公里)。这些飞行旨在测试不同的飞行参数(即速度、高度)和图像采集时间,以最大限度地提高在研究区域内各种生境类型中区分沼泽鹿与其环境的概率。基于分析结果,确定了以下参数:地面以上45米高度(对应67.5米宽的航线)、6.5米/秒的速度,以及每5秒拍摄一张照片,连续照片之间约有33%的前向重叠。在选择的航线参数下,未观察到鹿在无人机接近时出现逃跑行为。
WiMoBo项目:PNCDT的首次飞行于2022年12月底进行。在此初始阶段,使用四旋翼无人机(特别是DJI型号)进行了多次飞行试验,在不同高度观察鹿群在无人机存在下的行为。主要目标是确定一个不会打扰鹿群的飞行高度。根据对鹿群行为的观察,得出结论认为,为防止鹿群因无人机存在而感到威胁,最低飞行高度需达到海拔25米。然而,需特别指出的是,此初步分析仅适用于DJI四旋翼无人机,可能不适用于其他类型航空器。
-
数据处理
在Pantano项目框架内进行的飞行任务中,共获取了39,798张照片,分为575个样带。这些照片由4名专家科学家和168名经过培训的志愿者进行人工审查,并记录了其中出现沼泽鹿的照片。每位观察员分析了一组照片,遵循标准化流程:通过数字放大照片,从左至右、从上至下搜索沼泽鹿。通过比较连续重叠的照片以避免重复计数。每张照片均由至少两名独立观察员进行验证。所有观察员记录的沼泽鹿总数(排除同一只个体被多名观察员重复检测的情况)用于估算沼泽鹿的密度。
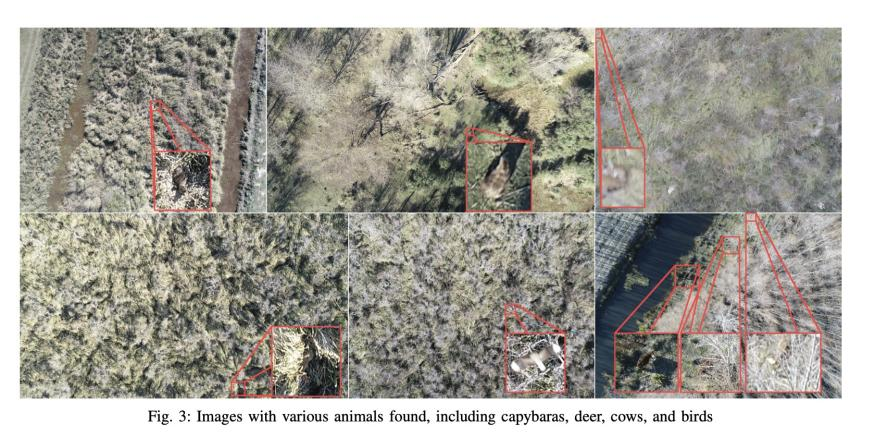
观察员在分析的照片中总共识别出231只鹿。此外,在此次工作中,还识别出88张包含牛的照片,由于牛与鹿在体型和颜色上相似,可能被误认为是鹿。三张照片中捕捉到了其他动物(两只水豚和一只鸟)。
部分图像可参见图3。值得注意的是,分析还发现了一张未被观察者初始标注的鹿类图像。该发现的详细结果将在结果部分讨论。
为232张阳性鹿类图像生成了掩膜,以精确识别鹿类所占用的像素。使用140张带有鹿及其对应遮罩的图像、54张带有牛的图像、3张带有其他动物的图像以及575张没有动物的图像(每条样带一张)对YOLOv8n-seg模型进行了微调。在训练过程中,使用了一个验证集,其中包含46张带有鹿的图像、17张带有牛的图像以及575张没有动物的图像(每条样带一张)。网络在将图像缩放至1280×1280像素后进行训练,允许图像以任意角度翻转和旋转。同时规定两只鹿的实例不得重叠。模型训练共进行了440个 epoch,在第340个 epoch时在验证集上达到了最优效果。整个训练过程耗时约6小时28分钟(23,252秒)完成。
如果你也想要使用模型进行训练或改进,Coovally——新一代AI开发平台,为研究者和产业开发者提供极简高效的AI训练与优化体验!Coovally支持计算机视觉全任务类型,包括目标检测、文字识别、实例分割等全新任务类型。
-
千款模型+海量数据,开箱即用!
平台汇聚国内外开源社区超1000+热门模型,覆盖YOLO系列、Transformer、ResNet等主流视觉算法。同时集成300+公开数据集,涵盖图像分类、目标检测、语义分割等场景,一键下载即可投入训练,彻底告别“找模型、配环境、改代码”的繁琐流程!
三、结果
以下各节对研究结果进行了全面分析,展示了所开发检测算法的性能及其影响。
-
检测评估
系统的性能采用标准目标检测指标进行评估。以下所有结果均基于包含46张鹿图像、17张牛图像及575张无动物图像的测试集进行测试。该数据集中的所有图像均未在模型训练或验证过程中出现。
在配备Nvidia T4 GPU的服务器上运行时,该模型对39,798张图像进行检测耗时3小时43分钟,相当于每秒处理近3张图像。
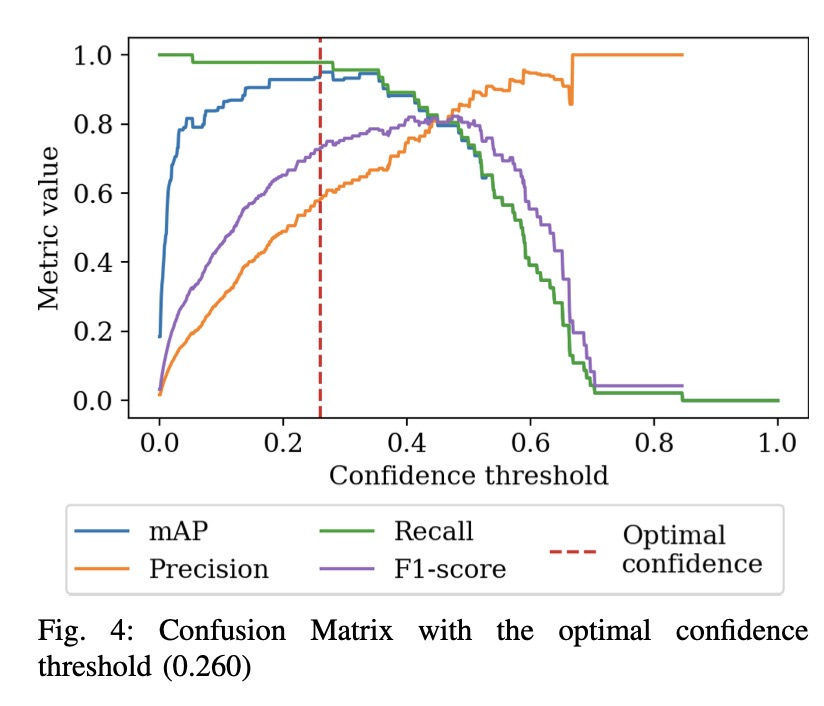
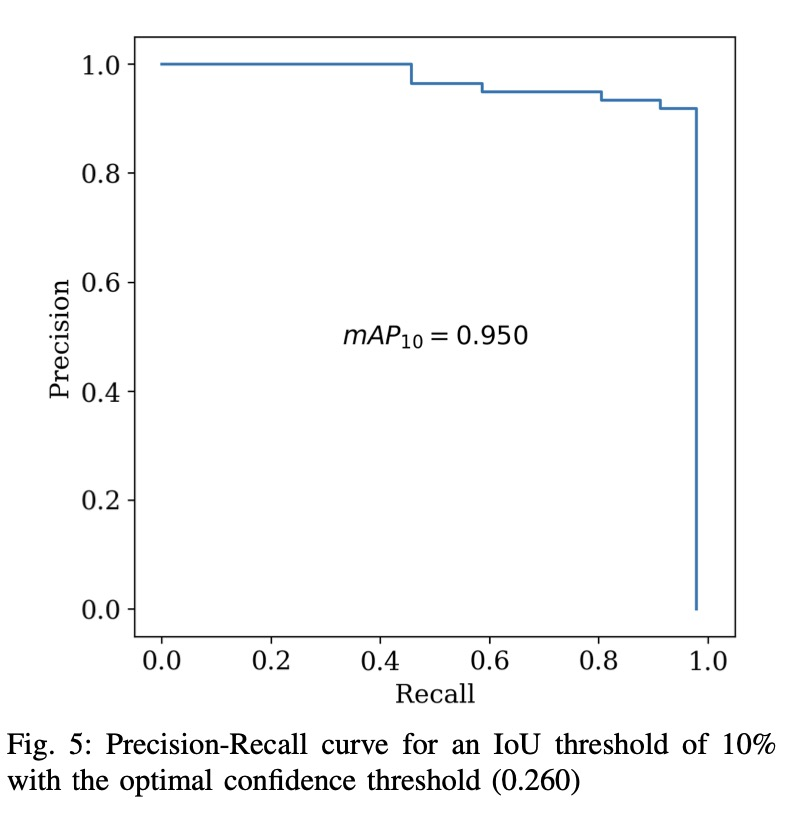
作为初步评估,在不同置信度阈值下测量了mAP10。选择10%的IoU是因为鹿在图像中占据的区域非常小,且鹿的完美构图对本问题无关紧要。
因此,在图4中可以看到,最大化mAP10的置信度阈值为0.260。图5显示了在此置信度阈值下的精确率-召回率曲线。
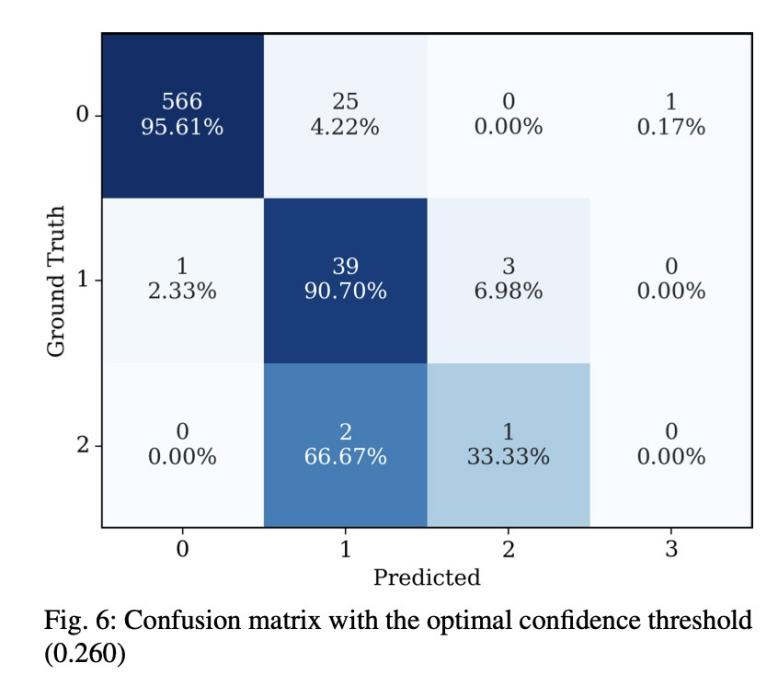
使用选定的最佳阈值,统计模型在测试集每张图像中检测到的鹿的数量。生成的混淆矩阵如图6所示。
-
发现未标注的鹿
在观察者进行的全面审查过程中,成功识别并分类了大量鹿。然而,基于YOLOv8的检测模型凭借其先进能力,识别出一个此前未标注的鹿,如图7所示。

这一案例在分析的早期迭代中被发现。它凸显了将自动化检测系统与人类观察相结合的实用性,尤其是在大规模数据集中,其中细微细节可能极具挑战性且难以一致识别。
-
潘帕斯鹿的评估
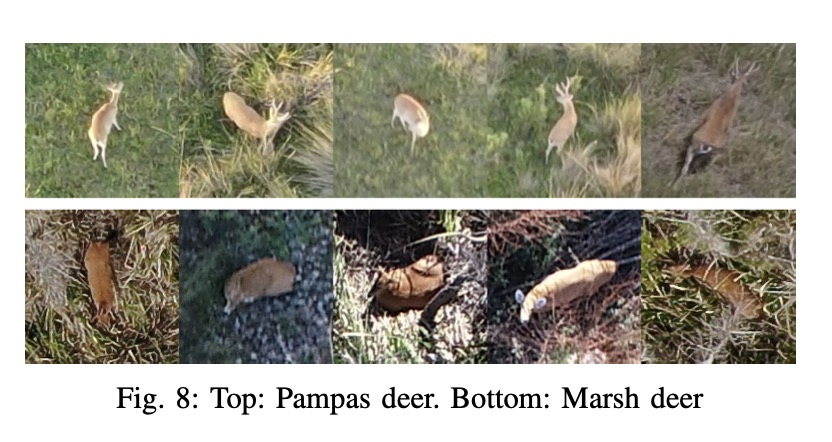
在沼泽鹿数据库上训练的模型在潘帕斯鹿数据上进行了评估,两者在颜色上存在差异,尤其是在鹿的下部区域,潘帕斯鹿颜色较浅,而沼泽鹿则更偏棕色,如图8所示。
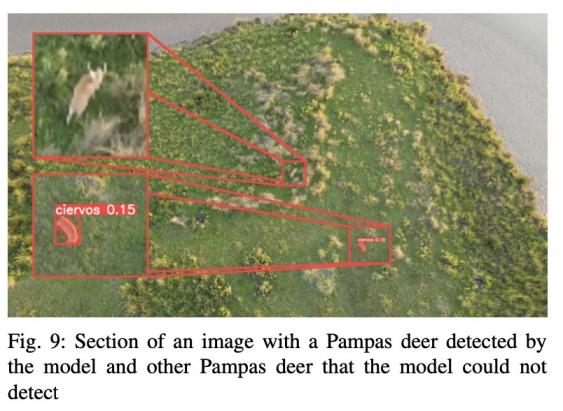
此外,潘帕斯鹿的图像并非从鸟瞰视角拍摄。模型能够在阈值接近0.1时检测到部分潘帕斯鹿(见图9),这表明虽然模型能够识别潘帕斯鹿,但存在一定局限性。
-
无需代码,训练结果即时可见!
在Coovally平台上,上传数据集、选择模型、启动训练无需代码操作,训练结果实时可视化,准确率、损失曲线、预测效果一目了然。无需等待,结果即训即看,助你快速验证算法性能!
-
从实验到落地,全程高速零代码!
无论是学术研究还是工业级应用,Coovally均提供云端一体化服务:
-
免环境配置:直接调用预置框架(PyTorch、TensorFlow等);
-
免复杂参数调整:内置自动化训练流程,小白也能轻松上手;
-
高性能算力支持:分布式训练加速,快速产出可用模型;
-
无缝部署:训练完成的模型可直接导出,或通过API接入业务系统。
!!点击下方链接,立即体验Coovally!!
平台链接:https://www.coovally.com
无论你是算法新手还是资深工程师,Coovally以极简操作与强大生态,助你跳过技术鸿沟,专注创新与落地。访问官网,开启你的零代码AI开发之旅!
四、结论
从野生动物监测到农业遥感、城市管理再到灾害预警,无人机与计算机视觉的融合正逐步构建一个“可感知的世界”。此次基于YOLOv8的濒危物种识别研究,既是科研创新的典范,也折射出智能边缘设备在实际场景中的落地能力。随着算法持续进化、硬件日趋轻量,无人机将成为未来“数据生产前沿”的关键节点,推动生态保护、环境治理乃至公共决策走向更加智能和精准的时代。

![push [特殊字符] present](https://i-blog.csdnimg.cn/direct/0e2d699bf1364b70ae0a9cc4ea31a927.gif#pic_center)
![[免费]微信小程序问卷调查系统(SpringBoot后端+Vue管理端)【论文+源码+SQL脚本】](https://i-blog.csdnimg.cn/direct/6e930f3dde3c4f2bb9cf4501c8642e1c.jpeg)



![2025年渗透测试面试题总结-腾讯[实习]科恩实验室-安全工程师(题目+回答)](https://i-blog.csdnimg.cn/direct/2ea6508e11f348769528e86055da4fc5.png)